

01 项目简介
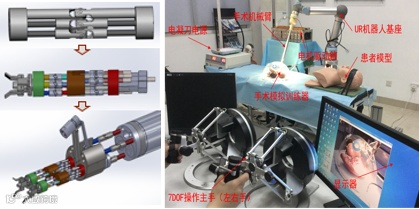
单孔微创手术机器人系统是新一代机器人辅助微创手术系统,近年来在全球范围内成为了研究热点。本研究课题采用了串并混联高度集成的结构设计,借助扭转系数极小的钢丝绳扭转传动实现前端机械手的微型化和驱动外置,实现集成两只机械手和一个内窥镜夹持臂于25mm直径的管臂前端。
通过建立主从异构遥操作控制系统和开发基于模型的控制算法实现机械手灵巧控制,通过模拟人的双臂协调完成任务实现双臂协调控制,通过视觉反馈和预估补偿网络控制实现主从实时操控完成手术动作。
该手术机器人系统具有手术单创口化、高灵巧度、高刚度、高精度、智能安全和远程操控高实时性等特点。
02 主要研究内容
Ø设计并组建单孔微创手术机器人系统,建立主从遥操作控制手术平台。
03 技术优势
04 合作方式
科技牛,一家为企业精准匹配科研专家,快速提供技术解决方案的产学研服务平台。关注我们,了解最新科技成果。


点击下方“阅读原文”填写技术需求表 ☺