

01 项目简介
02 主要研究内容
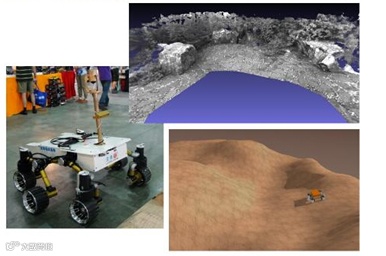
Ø设计并创造了六轮独立驱动的火星车原型机;
Ø采用CAN总线协议对火星车各硬件部分进行通讯控制;
Ø建立基于WEBOTS的火星车仿真平台,验证火星车运动控制算法与视觉算法的鲁棒性与准确性;
Ø研究基于双目立体视觉系统的三维地图创建与导航算法;
Ø研究基于视觉信息的火星车运动规划策略与自主行为优化,实现在复杂环境下的自主避障与导航;
03 技术优势
04 合作方式
科技牛,一家为企业精准匹配科研专家,快速提供技术解决方案的产学研服务平台。关注我们,了解最新科技成果。


点击下方“阅读原文”填写技术需求表 ☺