
导读:
随着人机协作领域的快速发展,对机械手的性能要求越来越高。本研究针对机械手在抓取不同形状物体时对承载力和通用性的高要求,设计了一种基于鳍条效应原理的变刚度柔性机械手。该机械手融合了欠驱动技术和柔性材料的优点,展现出卓越的被动柔顺性,并通过变刚度结构设计,显著提升了其承载能力。研究中提出了一种新的变刚度手指设计方案,通过外骨骼集成的概念,实现了机械手的双模态操作能力:低刚度模式下轻柔抓取易损物品,高刚度模式下牢固握持重物。通过ABAQUS仿真和实验测试,验证了变刚度机构对机械手性能的提升效果,结果表明,开启变刚度机构后,机械手的承载能力最高提升了近9.89倍,同时保持了良好的柔顺性。本研究为柔性机械手技术的发展提供了新的解决方案,并为未来的应用提供了广阔的前景。
01
基本信息:
一种变刚度柔性机械手的设计及其性能测试
Design and Performance Test of a Flexible Manipulator with Variable Stiffness
作者:
林群煦:五邑大学轨道交通学院,广东 江门;江门市五邑大学轨道交通智能运维与应急管理重点实验室,广东 江门;广州先进技术研究所机器人与智能装备中心,广东 广州;张立炜*, 刘成沛:五邑大学轨道交通学院,广东 江门;江门市五邑大学轨道交通智能运维与应急管理重点实验室,广东 江门;黄祖成, 王卫军, 王 建:广州先进技术研究所机器人与智能装备中心,广东 广州
关键词:
柔性机械手;鳍条效应;变刚度结构;ABAQUS仿真;承载力测试
项目基金:
国家重点研发计划(项目编号:2018YFA0902900)
原文链接:
https://doi.org/10.12677/airr.2024.133053
02
内容简介:
在汉斯出版社《人工智能与机器人研究》期刊上,有论文综合考虑鳍条夹爪的固有结构特点及变刚度机制的制造复杂性,提出一个既高效又实用的解决方案,以推动柔性机械手指技术的进一步发展。
本文提出了一种用于实现变刚度柔性机械手的设计方案。其基本思想是在传统柔性机械手的基础上,增加变刚度机构。该变刚度机构具有两种状态:在松弛状态下,其柔性较高,能够随着柔性机械手的形变而自由变形,因此与传统柔性机械手相比,变刚度柔性机械手的区别不大,能够有效适应不同形状的物体;在刚化状态下,变刚度机构成为一个“固化”的整体,其转动副会产生大量的自锁力矩,从而使得机械手的总刚度等于柔性机械手和“固化”后的变刚度机构之和,从而有效提高了总刚度。
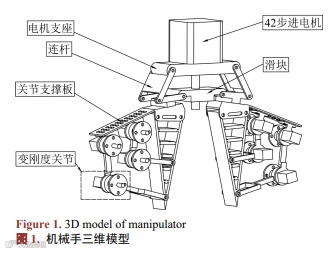
图1展示了简化后的刚柔耦合机械手的三维模型。其运动原理如下:由42步进电机驱动丝杆,使伸缩机构沿丝杆轴向移动。机械手指通过连杆连接至伸缩机构,通过伸缩机构的上下移动,实现机械手的张合。
关节原理图如图2所示。当需要开启变刚度机构时,T型螺母在直流减速电机的驱动下,在导向螺栓的引导下,由旋转运动转变为上下运动。当需要锁紧关节时,T型螺母下压,使摩擦上盘与摩擦下盘接触,产生静摩擦扭矩,阻碍摩擦盘的转动。在静摩擦扭矩的作用下,与上下摩擦盘相连的连杆1和连杆2之间的角度α暂时固定,从而实现关节固化,抵抗外力。

将模型导入至ABAQUS中,设定机械手的运动边界条件和各部分的接触条件,并对装配体各零件进行网格划分。由于装配体中钢制零件相对复杂,采用C3D4线性四面体网格。对于与被抓物体直接接触的柔性鳍条爪,采用C3D8H杂交六面体网格。为了定义主从接触面,设置被抓物体的网格大小是鳍条爪的两倍。装配体模型的网格总数为82,867个,其中软体鳍条手的单元网格尺寸设置为1 mm,网格总数为17,190个。零件间的相互运动关系通过软件连接器的设置完成。
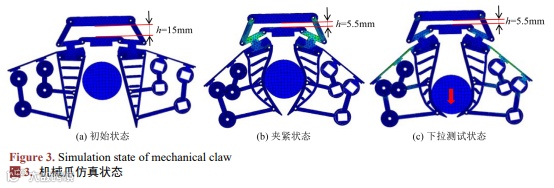
如图3(a)所示为机械手的初始状态,被抓物体悬置于机械手中间。此时滑块上表面与电机支座距离为15 mm (h = 15mm)。如图3(b)所示为机械手夹紧物体时的状态,通过滑块向上运动9.5 mm (h减小9.5 mm),机械手向内合拢,柔性体适应物体形状,形成包络。如图3(c)所示为被抓物体的下拉测试状态,机械手保持包络状态不变,控制被抓物体向下运动,直至被抓物体与手指脱离接触。
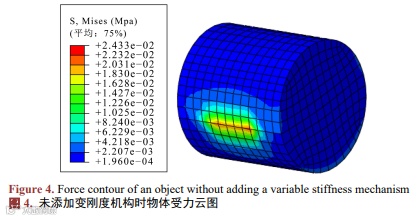
如图4和图5所示,分别为未添加变刚度机构和添加变刚度机构时,被抓物体被夹紧时的应力云图。从图中可以看出,添加变刚度机构对物体的柔性夹取影响较小。

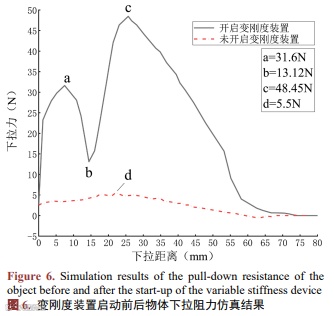
如图6所示,物体处于下拉状态时,比较变刚度机构未开启与开启后的下拉数值。当未开启变刚度装置时,物体下拉过程中所受的最大阻力为5.5 N;而开启变刚度装置后,物体下拉过程中所受的最大阻力为48.45 N,二者相差近8.8倍。由此可见,机械手在添加变刚度装置后,承载能力有显著提升。
结论
本文提出了一种基于鳍条效应的变刚度柔性机械手设计,通过在传统柔性机械手的基础上集成变刚度机构,实现了双模态操作能力。在低刚度模式下,机械手能够轻柔地抓取易损物品;在高刚度模式下,通过变刚度机构产生大量自锁力矩,显著提升了整体的承载能力,最高可达原有的9.89倍。ABAQUS仿真结果验证了该设计的可行性,并且对比分析表明,增加变刚度机构对柔性抓取性能没有明显影响。该设计兼顾了柔性和刚性,为柔性机械手技术的进一步发展提供了一种有效的解决方案。未来可进一步优化变刚度机构的结构参数和控制策略,以进一步提升机械手的性能和适用范围。
03
相关文章:
1.孔博磊, 孟巧玲, 项世传, 喻洪流. 基于柔性仿生关节的康复外骨骼机械手设计及运动性能分析[J]. 建模与仿真, 2023, 12(2): 1018-1030. https://doi.org/10.12677/MOS.2023.122096
2.张子强, 何贤, 刘晓旭, 高磊, 陈申奥, 迟德霞. 多腔体柔性机械手指弯曲变形分析与试验[J]. 机械工程与技术, 2023, 12(5): 456-463.
https://doi.org/10.12677/MET.2023.125050
3.赵晓阳, 石萍, 喻洪流. 一种欠驱动机械仿生半掌假手的研究与设计[J]. 建模与仿真, 2023, 12(2): 1117-1131. https://doi.org/10.12677/MOS.2023.122106
4.赵文武, 王敏敏. 一种基于MOF衍生的电催化材料的制备及其性能研究设计[J]. 物理化学进展, 2024, 13(3): 358-366. https://doi.org/10.12677/japc.2024.133041
5.李旭伟, 牛治慧, 杨东绩. 一种减振器衬套刚度试验工装设计方法介绍[J]. 机械工程与技术, 2022, 11(2): 171-178. https://doi.org/10.12677/MET.2022.112021
所属期刊

-Artificial Intelligence and Robotics Research-
《人工智能与机器人研究》是一本开放获取、关注人工智能与机器人研究领域最新进展的国际中文期刊,本刊支持思想创新、学术创新,倡导科学,繁荣学术,集学术性、思想性为一体,旨在给世界范围内的科学家、学者、科研人员提供一个传播、分享和讨论该领域内不同方向问题与发展的交流平台。

声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本公众号观点或证实其内容的真实性;如其他媒体、网站或个人从本公众号转载使用,须保留本公众号注明的“来源”,并自负版权等法律责任。如本公众号内容不妥,或者有侵权之嫌,请先联系小编删除,万分感谢!
地球与环境领域热门期刊推荐——《林业世界》
【荐读】基于百度热力图的重庆中心城区活力时空特征分析
免疫学研究|病毒免疫学研究进展
计算机科学与应用|金沙江流域气象服务业务系统设计与实现
目录与摘要|医学诊断 2024年6月14卷2期



投稿联系:027-86758873
QQ:2194278918
微信号:15802748706
投稿邮箱:2194278918@qq.com
合作联系:service@hanspub.org
点击“阅读原文”,免费下载论文