日本东京大学提出一种远距离、大范围海底测绘技术,采用多台自主潜航器(AUV)交替降落在海底实现高精度导航和测绘。
研究人员以四个AUV(A、B、C、D)为例,A为运动AUV,B为地标AUV,C、D为附属AUV。执行任务时,B先出发,下潜并提供位置信息;之后A出发,根据B提供的信息定位;A在完成B周围的测绘任务后,降落在海底,对自身定位信息进行处理,利用粒子滤波减少位置估算的不确定性,用聚类算法压缩信息,减少传输数据量;之后把定位信息传输给B、C、D;最后A、B交换角色,A作为的地标AUV,B作为运动AUV开始记录位置信息。按照这种方式,A、B交替作为地标,其他三个AUV进行测绘。这种方法不受定位距离和范围的限制,只要能源充足,即可对大范围海域进行高精度测绘。
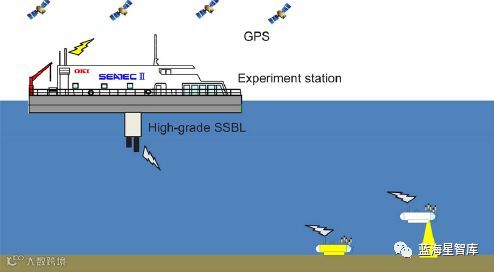
测绘试验设置
这项研究提出的测绘方法,能使AUV在没有任何海面支持的情况下,开展自主大范围海底勘测,在海底测绘、资源调查、搜索沉船等方面应用广泛。

 武昌造船
武昌造船