
无人机三光吊舱技术解析:精细化巡检与搜救应用
无人机搭载三光吊舱(可见光+红外热成像+激光测距)技术,正成为电力巡检、应急救援、森林防火等场景中的关键装备。其多源感知、精准定位与全天候作业能力,显著提升了复杂环境下的响应效率与安全性。

一、系统组成与技术原理
三光吊舱核心传感器:
- 可见光相机:支持4K分辨率或500万像素、30倍光学变焦,适用于标识识别、结构细节判读。
- 红外热成像相机:探测波段3–14μm,支持12种伪彩显示,可在夜间、烟雾或无光环境下识别人体、火点及设备过热等热源。
- 激光测距仪:采用905nm或1550nm人眼安全激光,脉冲式测距精度±1m(远距),相位式达毫米级(近距),量程5米至3公里。
协同工作机制:
- 共口径光学设计:三光路共享主镜头,确保光轴一致,实现“所见即所测”——热成像锁定目标后,激光即时完成测距。
- 多源数据融合:结合GPS/INS定位、姿态角及激光斜距,实时解算目标经纬度与高程坐标。
- 三轴增稳云台:基于高精度编码器与FOC控制,有效抑制飞行振动,保障成像稳定性。

二、精细化巡检与搜救应用流程
1. 灾情侦查阶段
- 热成像初筛:快速扫描高温区域,标记火灾核心区、人体热源等潜在风险点。
- 激光精准定位:测量被困者楼层高度、火源与通道间距,辅助制定救援路径。
- 可见光细节确认:在能见度允许区域切换可见光,识别防盗网、破损结构或人员受伤状态等关键信息。
2. 救援实施阶段
- 动态监测预警:热成像实时追踪温度突变(如火势蔓延至楼梯间),触发自动撤离警报。
- 设备操作辅助:激光提供破拆区域尺寸(如窗宽)、作业间距等数据,优化工具选择与操作方案。
- 全过程记录:可见光视频留存救援过程,支撑医疗研判与责任追溯。

3. 收尾与隐患排查
- 热成像深度扫描:探测墙体内部、管道井等隐蔽位置的残余火源或昏迷人员。
- 多光谱数据归档:融合可见光与红外图像生成三维模型,用于灾后复盘与分析。
三、关键技术优势
- 全天候作业能力:可见光与红外互补,支撑昼夜、雨雾、烟尘等复杂环境连续作业。
- 高精度定位:激光测距±1m精度叠加GPS/INS,目标地理坐标误差稳定控制在米级以内。
- 效率与安全性提升:单机覆盖半径可达100公里(如大面积森林巡检),替代人工进入火场、高压线走廊等高危区域。
- 智能扩展性:模块化架构支持AI目标跟踪、多光谱融合算法升级,可拓展至自动识别火点、人体姿态等功能。
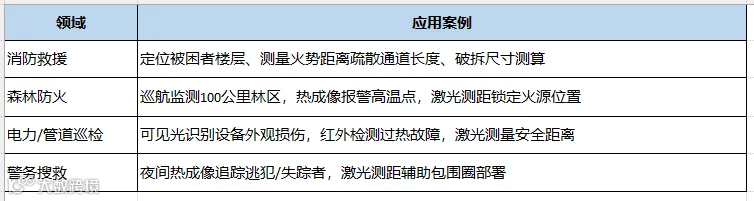
四、典型应用场景
五、技术挑战与发展趋势
当前局限:浓烟环境会降低红外图像对比度;远距离激光测距易受大气衰减影响精度。
未来方向:
- AI深度融合:发展火点自动识别、被困人员姿态分析与持续跟踪能力。
- 轻量化与多功能集成:融合气体检测、通信中继等模块,提升单平台任务承载力。
- 5G实时传输:增强超高清视频流与多光谱大数据的低延迟回传能力,支撑远程协同决策。
该技术体系通过多光谱协同感知、高精度地理定位与智能数据分析,全面强化了复杂场景下巡检的精细度与搜救的成功率。实际部署中,需依据任务特性优化吊舱配置——例如森林防火侧重红外灵敏度,城市救援则强调可见光变焦与细节还原能力。