霍夫变换是一种特征检测(feature extraction),被广泛应用在图像分析(image analysis)、计算机视觉(computer vision)以及数位影像处理(digital image processing)。霍夫变换是用来辨别找出物件中的特征,例如:线条。他的算法流程大致如下,给定一个物件、要辨别的形状的种类,算法会在参数空间(parameter space)中执行投票来决定物体的形状,而这是由累加空间(accumulator space)里的局部最大值(local maximum)来决定。
现在广泛使用的霍夫变换是由RichardDuda和PeterHart在公元1972年发明,并称之为广义霍夫变换(generalizedHoughtransform),广义霍夫变换和更早前1962年的PaulHough的专利有关。经典的霍夫变换是侦测图片中的直线,之后,霍夫变换不仅能识别直线,也能够识别任何形状,常见的有圆形、椭圆形。1981年,因为DanaH.Ballard的一篇期刊论文"Generalizing the Hough transform to detect arbitrary shapes",让霍夫变换开始流行于计算机视觉界。
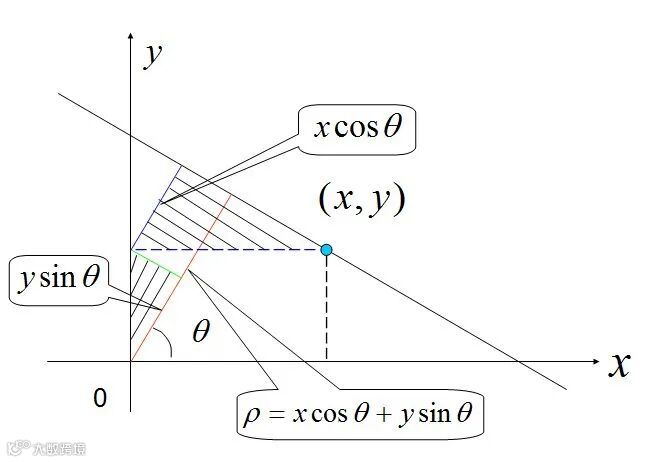
计算机视觉中经常需要识别或者定位某些几何图形,比如直线、圆、椭圆,还有其他一些图形。检测直线的霍夫变换提供了在图像中寻找直线的一种算法,是最简单的一种情形,后来发展到检测圆、椭圆、还有一般图形的霍夫变换,其核心思想是把图像中属于某种图形的点集(二维)映射到一个点(可以是高维)上,这个点记录了点集中点的数目,使得程序通过搜索峰值找到该点,这个点就是后面要说到的图形的参数,而该参数的范围就叫做参数空间。霍夫变换不仅能够识别出图像中有无需要检测的图形,而且能够定位到该图像(包括位置、角度等),这就非常有用了。

霍夫变换模板匹配:
此算法适用于使用传感器的点云数据进行图像识别,给与机器人一个局部的目标追踪的依据,主要方法是通过卷积的系统处理、霍夫变换算法进行投票选出特征值随后进行模板匹配进行拟合图形并转换坐标给到机器人。
首先获取的是激光或者其他传感器(比如RGBD相机)所获取或者转换的点云数据,通过滤波和聚类算法进行消除噪点,随后通过当在两个维度上执行卷积——水平和竖直方向。我们混合两桶信息:第一桶是输入的点云数据,其中每个元素都是对于机器人位置的坐标信息。第二个桶是卷积核(kernel),单个浮点数矩阵。可以将卷积核的大小和模式想象成一个搅拌矩阵的方法。卷积核的输出是一个修改后的矩阵,在深度学习中经常被称作feature map。对每个位置通道都有一个feature map,随后引入到霍夫变换算法中进行评分。
霍夫变换是一个特征提取技术。其算法通过投票程序在特定类型的形状内找到对象的不完美实例。这个投票程序是在一个参数空间中进行的,在这个参数空间中,候选对象被当作所谓的累加器空间中的局部最大值来获得,所述累加器空间由用于计算霍夫变换的算法明确地构建。Hough变换主要优点是能容忍特征边界描述中的间隙,并且相对不受数据噪声的影响。通过此算法,投票出的结果交给已有预设值的模板匹配算法模块得到的预估的结果,将其坐标转换到以机器人为中心的相对位置,给与机器人一个目标追送的位姿信息。

艾智机器人 创新 超越梦想