

1 三角定位
2.1 三角定位原理
无线信号在空口传输的过程中会受到路径损耗、多径效应等因素的制约发生信号衰减,而信号的衰减和传播距离呈一定的线性关系,由此可以得到终端侧接收功率随距离变化关系的信号传输损耗模型,以此推断出终端与AP之间的距离。
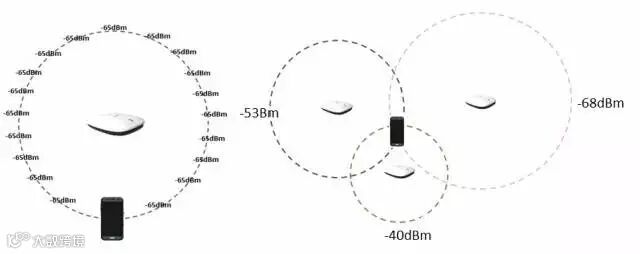
如下左图根据终端测得接收到信号的强度,来换算出一个距离半径R,但不能确定终端具体的位置和方向,所以360度方向的位置都有可能是终端所在的位置,即得到一个以AP为圆心,以R为半径的圆形。
如下右图,当三个AP以同样形式得到了三个圆的焦点即为终端的所在位置。由于AP所在点位的位置已知,由此通过定位服务器的运算就得到了终端的坐标(x,y)的值。
优点
1、无需花费大量时间和人力进行采样,无需维护数据库备份和更新。
缺点
1、需三个AP同时覆盖到定位终端的所在点位才能准确定位,要求AP部署密集。
2、环境因素、多径效应等情况使信号衰减发生变化,定位精度不够准确。
3、提供无线定位的WLAN网络,同时采用无线接入的情况下,各AP之间干扰大。
2丘比特定位
2.1 丘比特定位原理
传统的WLAN定位技术,不论是基于传输模型的三角测量法,还是基于采样的指纹方式,其都依赖于WLAN的信号强度(RSSI)值的准确性。
受制于室内的应用环境,即受到电磁波的多径效应、人体对信号的遮挡等原因,RSSI值的变化非常大,显然影响了其系统的定位精度。
而H3C目前所开发出一套CUPID原型系统,定位精度相对较高,且不易受环境的影响和制约。
该系统同时利用RSSI与RTT,通过测算定位终端与AP的距离,再利用三角定位法进行定位,不仅能够得到更高的定位精度,还能省去耗时耗力的采样过程。“
路程=速度*时间”这么这样很简单的一个公式,相信我们小学的数学课本中已经学习到了,如下图“速度”为无线报文在空口中采用的传输速度,即为光速“c”等于10的8次方米每秒,即为已知条件。
想要知道“时间”即为图中“RTT”的值,想得到这个变量也并不难,AP向终端发送报文以及接收到终端发送的报文的时间差即“RTT=TOA-TOD”。
最后我们要得到“距离”的值,即为图中的“D”,“D=C*RTT”,由于RTT为AP发送并接收到报文的时间差,很明显得到“D”值为一个来回的路程,所以要除以2。
那么大家还有一个疑问就是下图中“△t”是什么值,为什么要剪掉,那么“△t”为终端接收到AP报文到发送出去报文的响应时间,因为这个过程中,报文并不在空口当中进行发送,所以要扣除这部分时间,即得到公式“D=c*(RTT-△t)/2”。

那么如上面所述得到的仍然是一个AP与终端之间的距离,类似三角定位方式同样得到的是一个圆形,单位从“dBm”换成了“m”。同样通过三个AP得到的三个圆的交点来确定终端的位置。

优点
1、定位精度高,且不受环境变化、信号衰减等影响。
2、无需采样、无需维护数据库备份和更新。
缺点
1、各终端的报文处理和响应时间(△t)稍有差异,导致定位略有偏差。
2、同三点定位,提供无线定位的WLAN网络,同时采用无线接入的情况下,各AP之间干扰大。

