


睿驰解读
上一期中,我们带大家初步了解了自动驾驶技术中的“双眼”——感知模块。而在完整的自动驾驶系统之中,不仅需要感知模块作为“双眼”进行信息的采集,更需要“大脑”进行信息的处理及反馈,然后下达指令,这个“大脑”就是自动驾驶中的决策规划模块。今天我们就给大家简单介绍一下自动驾驶的“大脑”决策规划模块,这一衡量和评价自动驾驶能力的核心指标。

感知规划
自动驾驶的最强大脑
既然被称为大脑,可想而知,决策规划是自动驾驶中至关重要的一环。目前大部分量产车所配备的多为服务较低级别自动驾驶的ADAS系统,它能够提供包括:车道线偏离提醒,车道线保持,自适应巡航,盲点检测等辅助驾驶员的功能。这些功能能够通过报警,或者执行简单的控制行为来有效的降低行驶过程中的风险。但它还不够智能,还不能自主规划从原点A到目标点B的行驶轨迹,在途中不能主动做出超车、跟车、避让障碍物等决策。决策规划则可以解决上述问题,是自主驾驶系统智能性的直接体现,其大体上可以分为两个层次,从高到低为全局路径规划和局部路径规划。

全局路径规划
大脑的自动导航
高级/完全自动驾驶的规划模块,根据自身定位和目的地位置,选取一条符合需求的最优路径的过程属于全局路径规划。这个过程和我们人类驾驶员开车时,拿出导航输入起始点和终点后,根据自身需求(比如到达时间最短,不走高速等)选取一条导航路线的过程类似。常见的全局路径规划算法包括Dijkstra和A*算法,以及在这两种算法基础上的其他改进。Dijkstra算法能解决寻找图中节点间最短路径问题。A*算法是一种搜索算法,用来解决Dijkstra算法的搜索效率问题。
局部路径规划
导航的“语音提示“
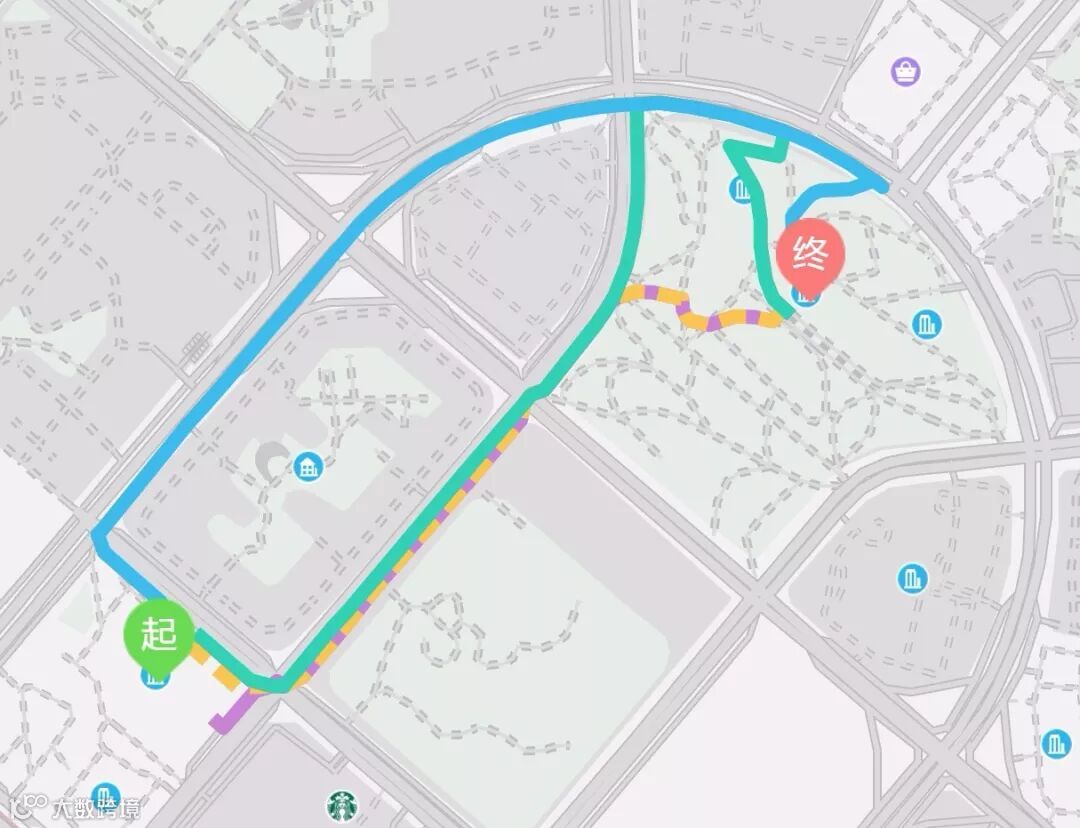
局部路径规划,在得到全局路径后,将此作为参考,结合从感知模块得到的周围环境信息、从定位模块获得的自身位姿信息、以及外部交通规则等其他信息,通过一些特定的约束条件(包括车辆本身的动力学约束,保证乘客舒适度的约束等),规划出两点间多条可选安全路径(无碰撞),并在这些路径中选取一条最优的局部路径作为车辆行驶轨迹。举个例子,比如我们的全局路径是要从沈阳东软软件园A园东1门出门,左转沿世纪路一直开,到B园的东南门为止。在接收到这个全局路径后,从A园东1门出门左转就是我们要进行局部路径规划的第一部分。如果正前方正好有车辆和我们路径一致也要左转,那我们可以选择跟着前车一起转这个弯,这时我们的决策规划模块要考虑的信息包括我们车辆自身的位姿,前车的速度,转角,以及横向驶来的其他车辆的距离、方向、速度等信息。

当然这个看似简单的出门左转可以变得很复杂,比如在上下班时间,路口车流量大,车速快,有车辆行人不守规则横穿马路等情况时,决策规划模块要考虑上述所有信息做出最优的轨迹选择并下发指令到控制模块。

一个聪明的“大脑”会给我们带来什么方便呢?目前大家能体验到的最直观的便利就是,一些车辆配备的Stop&Go功能。遇到堵车场景,可以交给车辆自己跟车走停。去年无人驾驶实验室完成的停车楼内的自主泊车场景中,车辆自己行驶到云端指定的车位附近并精准泊入车位也离不开强大的决策规划模块。有些狭窄车位或者是一些角度刁钻的车位可能会给人类驾驶员带来一些困扰,有了智能的规划,这些也都不在话下了。

真实的驾驶场景千变万化,包括自车在内的每一个参与者都会对环境中的其他参与者带来影响,因此我们需要对环境中其他参与者的行为进行跟踪和预测。这部分信息依赖于自车的感知系统,但目前自动驾驶车辆对于环境信息还不能做到100%的感知。决策规划模块需要解决的是一个在变化万千的多智能体博弈的复杂环境中,在存在感知不确定性的情况下,做出最优的决策和规划的问题。因此我们才说,决策规划模块是名副其实的自动驾驶的大脑。有了强大的大脑,还需要配合默契的手脚来准确地执行命令,下一期《睿驰解读》我们会详细介绍自动驾驶的手脚——控制模块,敬请关注。东软睿驰,让我们对未来出行充满更多期待!
