研究智能驾驶行业具有深远的社会与经济价值。通过人工智能与5G等技术的融合,该领域能有效降低人为因素引发的交通事故,重塑道路交通安全体系。同时,自动驾驶技术可提升交通效率,减少一定的碳排放,助力碳中和目标实现。其发展还将推动车载芯片、高精地图、物联网等产业链升级,催生共享出行等新型商业模式,为智慧城市建设注入核心驱动力,是第四次工业革命的重要技术突破方向。本文聚焦当前国内外智能驾驶行业发展现状及未来走向趋势展开分析探讨。
根据《中国智能驾驶白皮书》,智能驾驶是指通过给车辆装配智能系统和多种传感器设备(包括摄像头、雷达、卫星导航设备等),实现车辆的自主安全驾驶的目标。智能驾驶可以分解为导航、自主驾驶和人工干预。导航解决位置信息如在哪里、到哪里、走哪条道路中的哪条车道等问题;自主驾驶是在智能系统控制下,完成车道保持、超车并道、红灯停绿灯行、灯语笛语交互等驾驶行为;人工干预,主要是车内乘员通过人机交互系统进行意图表达和意外情况处置。本质为吸引和注意力分散的认知工程学,将单一人工驾驶模式改变为双驾双控,既可以通过自主驾驶将人从低级、持久、繁琐的驾驶活动中解放出来,又可以在智能车难以判断的复杂和危险情况下,将驾驶权移交车内乘员。
安全上,自动驾驶可有效减少交通事故。据文远知行招股书,2021年全球和中国大陆分别发生了4320万起和860万起交通事故。人为失误造成了大约90%的交通事故,而自动驾驶可显著减少乃至消除人为失误。相较于人类,机器可将注意力持续保持在高水平,降低了因注意力分散导致的交通事故发生风险。
效率上,高水平自动驾驶可显著降低运营成本。据文远知行招股书,自动驾驶运营成本主要为人力成本、能源成本及其他成本,其中人力成本占比最大,以中国大陆为例,人力成本占比高达约59%。实现无人驾驶后,人力成本有望得到大幅降低。
资料来源:Nvidia,甬兴证券研究所
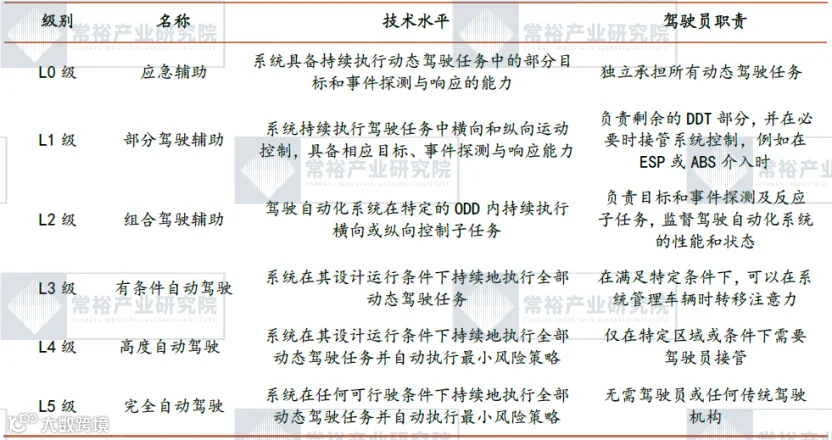
根据自动化程度的不同,自动驾驶被划分为六个等级(L0-L5),其中L5为完全自动驾驶。随着从L0到L5的逐级提升,车辆的自动化程度也逐步提高。
图表:智能驾驶技术分级
资料来源:《汽车驾驶自动化分级》,招商证券
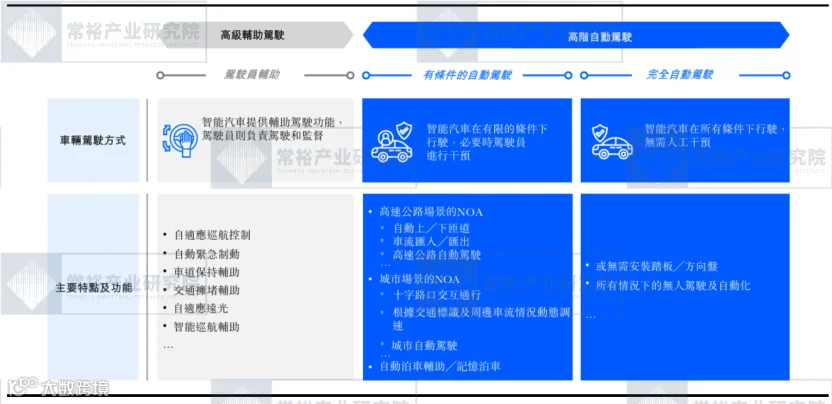
现阶段高阶智驾指区别于高级辅助驾驶,基于驾驶自动化系统能够执行动态驾驶任务,能够实现有条件的自动驾驶或完全自动驾驶的智驾系统。对应我国GB/T40429-2021《汽车驾驶自动化分级》国家标准中的3级以上的驾驶自动化;同时也对应国际自动机工程师学会(SAE)的分级标准中的L3-L5级别的自动驾驶等级。
图表:高级辅助驾驶与高阶自动驾驶的特征
资料来源:东吴证券研究所
(二)智能驾驶系统构成
智能驾驶系统:硬件、软件、算法的协同工程。据《华为MDC智能驾驶计算平台白皮书》(2020),智能驾驶业务场景较多,技术难度较高,产业链长且分工复杂。从功能上看,智能驾驶系统可分为三大部分:感知系统(各类传感器组成)、决策系统(计算平台)与执行系统(各类执行器组成),而其中决策层由于涉及多种ICT关键技术,功能相对最为复杂,又可分为硬件类,如芯片SoC、硬件工程等;软件类,如操作系统、中间件、云服务、OTA;算法类,如聚类算法、机器视觉、深度学习、强化学习、机器学习等。、
图表:百度Apollo 6.0自动驾驶解决方案对于硬件/软件的协同
资料来源:《中国智能汽车软件产业发展洞见》,甬兴证券研究所
软件定义汽车已成为产业发展共识。据《中国智能汽车软件产业发展洞见》,软件定义汽车,即软件深度参与到汽车定义、开发、验证、销售、服务等过程中,并不断改变和优化各个过程,实现体验、过程持续优化、价值持续创造。
图表:全球主机厂软件定义汽车布局
资料来源:《中国智能汽车软件产业发展洞见》,甬兴证券研究所
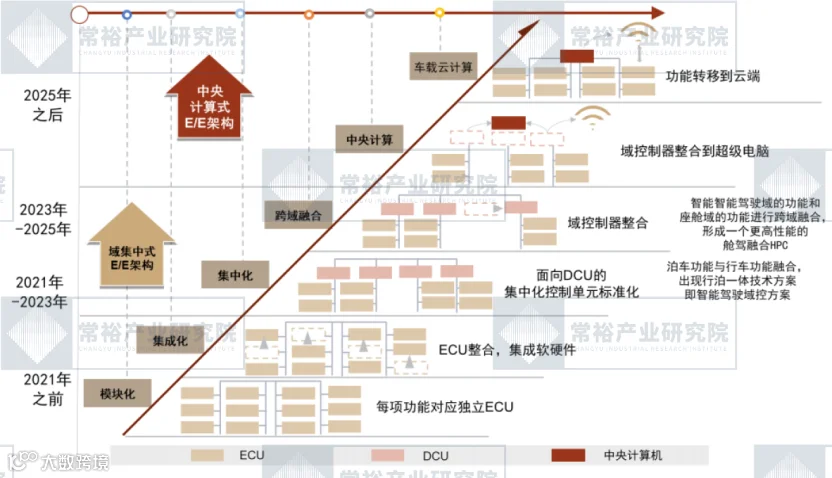
从分布式向集中式转变的EE架构是实现软件定义汽车的前提。电子电气架构是将车载传感器、电子电气分配系统、软硬件整合在一起,实现通讯信号网络、数据网络、电源管理的电子电气解决方案。复盘汽车电子电气架构的发展方向,整车架构从分布式走向部分域控,再由域集中再走向跨域融合,最终实现整车集中控制。届时,汽车中央电脑将共享整车算力,打通全车全场景,真正实现软件定义汽车。在当前的域集中式架构阶段,多数整车厂采用经典五域划分:座舱域、智驾域、动力域、底盘域和车身域。为了充分利用算力资源和进一步简化整体架构,域集中架构逐渐走向多域融合,通过软件实现分区协调和控制,以实现功能协同性和提升整车智能化水平。从域控制器到跨域融合、再到中央电脑,整车综合性能优势逐渐凸显。
图表:汽车电子电气架构演变
资料来源:盖世汽车网,中金公司研究部
各国加速自动驾驶相关法规制定,全球已有17个国家制定或修订自动驾驶汽车相关的法律法规,典型国家如德国、日本和美国。国内正逐步完善智能网联汽车法规,明确支持L3商业化应用,目前全国已有50多个城市出台有关智能驾驶的地方性法规。从政策趋势来看,1)对于自动驾驶的限制逐步放开,原则上鼓励自动驾驶发展;2)法规细节逐步完善,如对于事故责任认定、标准的制定、全环节规范等进行了更加清晰的划分和规定;3)试点逐步增加,截至目前,北京、上海、重庆等20个城市已获批为试点城市,国内已有长安汽车、比亚迪,广汽、上汽、北汽蓝谷、中国一汽、上汽红岩、宇通客车和蔚来汽车9家车企拿到L3级试点准入证;4)适用范围进一步扩大,法规覆盖到Robotaxi、Robobus等L4级别车辆,美国首次明确Robotaxi的政策法规框架,站在国家层面上为自动驾驶相关的企业、产品、责任划分、载客等都进行了规定。
图表:国内外智能驾驶政策梳理
资料来源:观察者网,雷科技,中国通信院,国盛证券研究所整理
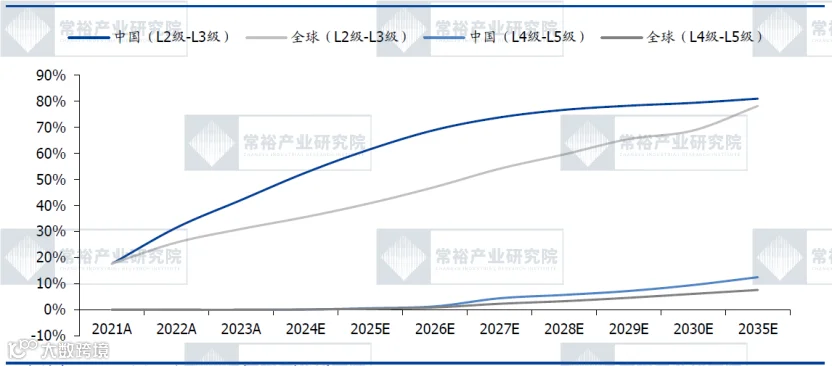
分级别来看,L1-L2+级别智驾已较为成熟;L3的代表性功能为城市NOA,2024年小鹏、理想等车企实现城市NOA,为L3落地元年,预计2025年L3渗透率快速提升;L4-L5级仍处于发展初期,基于弗若斯特沙利文预测,2024-2026年全球L4-L5级渗透率分别为0.1%/0.6%/1.3%,2027年有望提至4.4%。
海外企业,特斯拉FSD处于L2级别;奔驰最新L3级自驾系统-DRIVEPILOT获准上路,即将在2025年初在德国上市销售;Waymo为L4级别无人驾驶出租车。国内企业,华为、小鹏、理想、比亚迪等主流车企多处于L2+级自动驾驶,华为和理想已经明确2025年将推出L3试点demo,小鹏预计2025年实现类L3智能驾驶,智己预计2026年实现L3量产,小马智行、文远知行、百度Apollo定位L4级智驾。
图表:全球及中国智能驾驶渗透率
资料来源:如祺出行招股书,国盛证券研究所
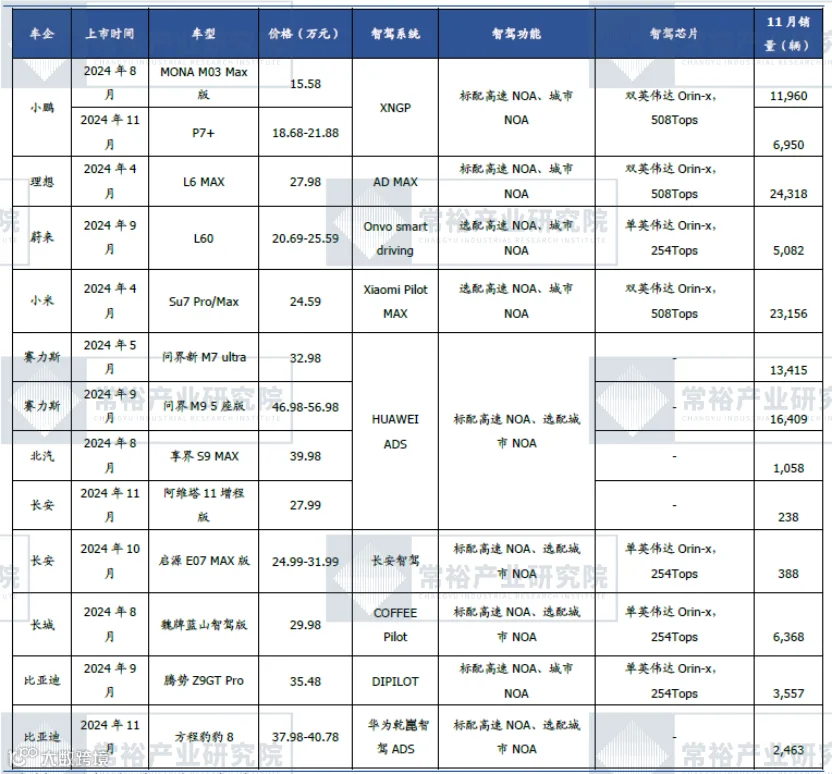
2024年多款高阶智驾车型推出,销量表现亮眼:2024年新势力、自主品牌共同发力智驾,多款高阶智驾车型推出,价格覆盖15-40万元,热销车型小鹏MonaM03、理想L6、小米SU7、问界M7月销均过万。小鹏P7+已实现全系标配城市NOA;理想高阶智驾仅限Max版本;小米、鸿蒙智行、长城的城市NOA功能均为选配;比亚迪腾势Z9GTPro标配城市NOA。目前智驾芯片主要采用英伟达Orin-x,算力达254/508Tops。
图表:2024年重点智能驾驶车型
资料来源:汽车之家,车主之家,国盛证券研究所
目前,从标配看,2024年前三季度城市NOA主要集中在25-30万元价格区间,占比25.8%,主要车型有理想L6、小鹏G6/G9等;从预埋看,主要集中在25-30万元价格区间,占比38.9%,主要车型有Model3/Y、小米SU7等。但可实现城市NOA的车型价格正在逐步下探,2024年前三季度15-20w标配城市NOA的乘用车比重达1.0%,而2023年仅20万元以上车型才可搭载该功能。高阶智驾车型正向10w+价格带推进,包括丰田、奇瑞、小鹏等在内的多个品牌展出20万元以内搭载高阶智驾的车型,如小鹏MONAM03、小鹏P7+、丰田铂智3X((2025年初上市),均可实现城市NOA,做到全国都能开。
图表:2023年及2024年前三季度乘用车标配城市NOA分价格占比
资料来源:佐思汽研,国盛证券研究所
图表:20万级别及以下高阶智驾车型梳理
资料来源:佐思汽研,汽车之家,国盛证券研究所
(三)功能持续演进,从“城市NOA”到“车位到车位”
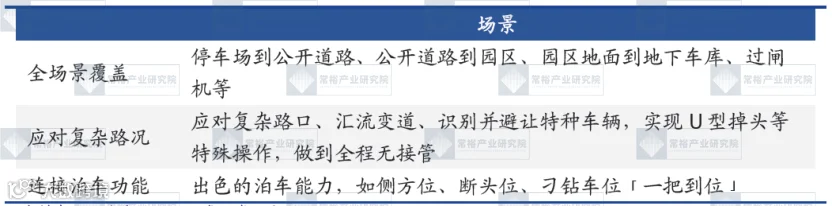
2024年主要为城市NOA的开城阶段,截至2024年底,主流车企均已实现全国全量推送城市NOA,但落地速度有差异,小鹏、华为、理想率先完成,其他车企多于Q4实现全国都能开。“车位到车位”成为最新的智驾体验标准,背后包含全场景覆盖、应对复杂路况、连接泊车功能。特斯拉、华为、理想、小鹏、小米、极氪六名智驾玩家,都进入「车位到车位」的竞争中。节奏来看,理想、华为已经在年底全量推送了「车位到车位」功能,小米、小鹏、特斯拉都开启了不同程度的内测,都预计2025年开启全量推送,极氪则预计一季度分批推送,Q2全量推送。2025年第一梯队的小鹏、华为、理想将重点发力车位到车位功能,其他车企进一步夯实其城市NOA的能力。
图表:车位到车位的具体应用
资料来源:汽车之心,国盛证券研究所
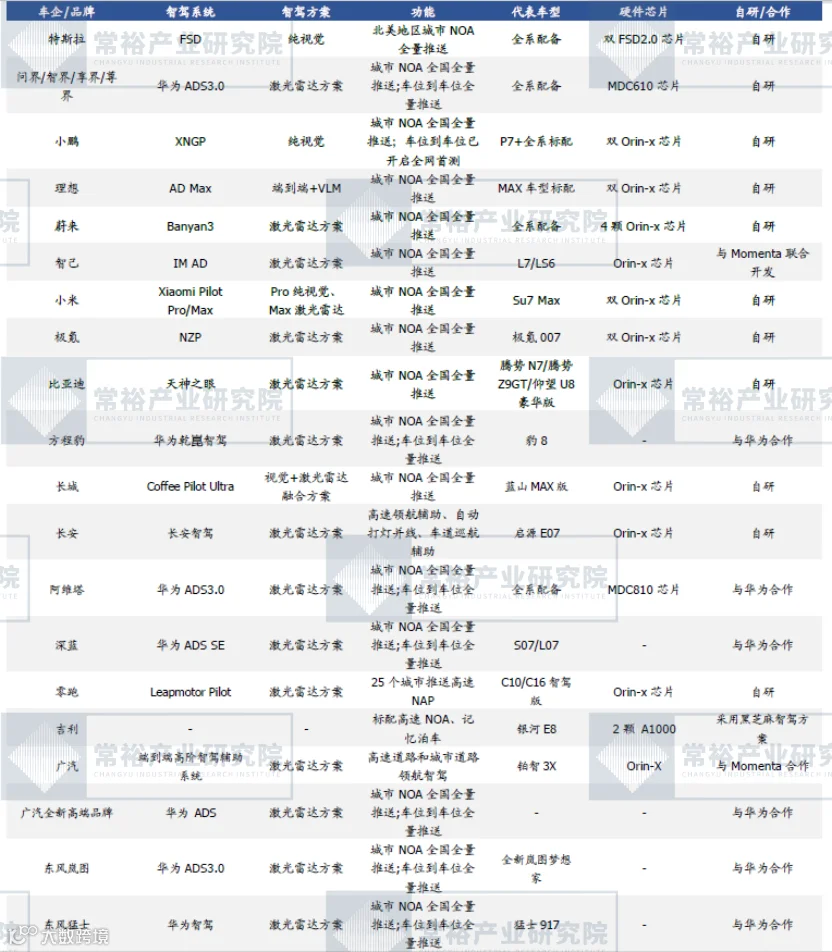
图表:主流车企智驾进展情况
资料来源:IT之家,财新网,搜狐汽车,理想汽车官网,金融街界,汽车之家,腾讯汽车,E车汇,易车百科,澎湃新闻,华为官网,钛媒体,车东西,新浪科技,国盛证券研究所
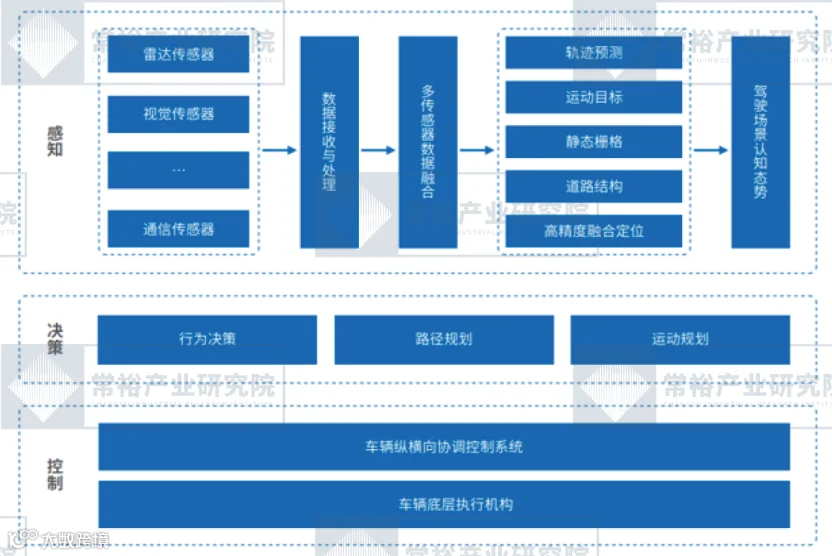
模块化方案各有千秋,传统自动驾驶架构存内生局限性。传统上自动驾驶分为感知、决策、规划与控制等模块,通过模块化的方式完成自动驾驶任务。模块化方案中,每个独立的模块负责单独的子任务,具备简化研发团队分工、便于问题回溯、低耦合、可解释性高、易于调试迭代等优点,但由于将不同任务解耦,各个模块相对于最终的驾驶规划目标存在信息损失问题,因此往往会丢失最优性,另外多个模块间优化目标不一致,误差会在模块间传递,造成误差传递。
图表:传统自动驾驶“感知-控制-决策”架构
资料来源:《中国智能汽车软件产业发展洞见》,甬兴证券研究所
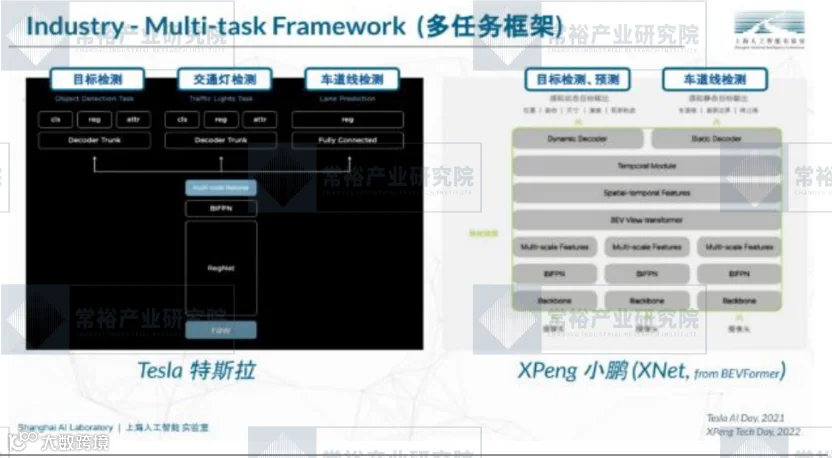
多任务结构可降低整体运算成本,但仍无法实现全局最优。据《端到端自动驾驶系统研究综述》(陈妍妍等,2023),多任务架构基于“任务并行”理念的,使多个任务共享提取主干网络,并为每个任务单独设置解码组件,可降低整个系统运行过程的计算开销,实现更高效的推理速度。但该范式模型主要学习的是在多个任务间找到最佳平衡点来实现性能的相对最优,而非保证每个任务均达到最优。此外,不同任务间的优化目标并不一致,如感知模块的检测任务追求平均精度,规划模块以最小位移误差为评价指标以追求驾驶的安全性及舒适性,这将导致整个系统内存在冲突,无法朝着统一的优化方向进行学习,共用较大差异性的任务特征也可能损害最终的预测规划结果。
图表:多任务框架示意图
资料来源:上海人工智能实验室,清华大学智能产业研究院,甬兴证券研究所
端到端架构具备设计优势,整体效果有望更佳。据《端到端自动驾驶系统研究综述》(陈妍妍等,2023),端到端架构直接从车辆状态和传感器采集的外部环境数据中学习策略,通过绕过中间组件来消除潜在的信息瓶颈和累积误差,并允许网络效仿人类驾驶员朝着最终目标持续优化。
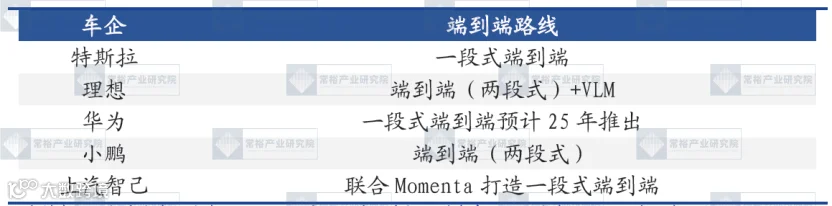
端到端技术路线上,一段式端到端将智驾的感知、预测决策、规划等多个模块合为一体;两段式端到端,一段是感知与决策阶段,其次是规划与控制阶段。目前,华为、百度Apollo、小鹏汽车等采用两段式端到端,特斯拉、商汤科技、Momenta则是一段式端到端。多家车企开始转向“一段式端到端”,华为一段式预计2025年量产,ADS4.0将搭载;小米汽车将原来“感知”和“规控”两个二级部门合并为“端到端算法与功能部”,或将一段式作为目标;理想汽车、广汽埃安等均已布局“一段式端到端”。
图表:主流车企端到端技术路线
资料来源:新浪汽车,汽车之心,IT之家,经济观察报,懂车帝,佐思汽研,国盛证券研究所
端到端助力高阶智驾的竞争重点从算法转向数据+算力。凭借全局优化、更高计算效率、更强泛化能力等优点,端到端技术迅速成为高阶智能驾驶方案当前最优解。参考高速NOA的发展历史,判断城市NOA等高阶智驾经过24年的大规模的落地应用后,在端到端大模型技术的加持下,有望在2025年从“能用”迈向“好用”。高阶智驾将成为toC乘用车市场竞争的重要手段。在端到端智驾方案中,数据和算法是最核心两大要素。因此,高阶智驾的竞争重点算法维度转向数据+算力。
Robotaxi即自动驾驶出租车,是一种利用人工智能、传感器、通信等技术实现自主行驶的出租车。这些车辆通常配备了高精度地图、摄像头、雷达、超声波等设备,能够感知周围的环境和交通状况,并通过算法和控制系统进行路径规划、避障、加减速、转向等操作。乘客可以通过手机APP或者语音识别等方式预约或者叫到自动驾驶出租车,并输入目的地。自动驾驶出租车会按照最优路线将乘客送达目的地,并完成付款和评价等流程
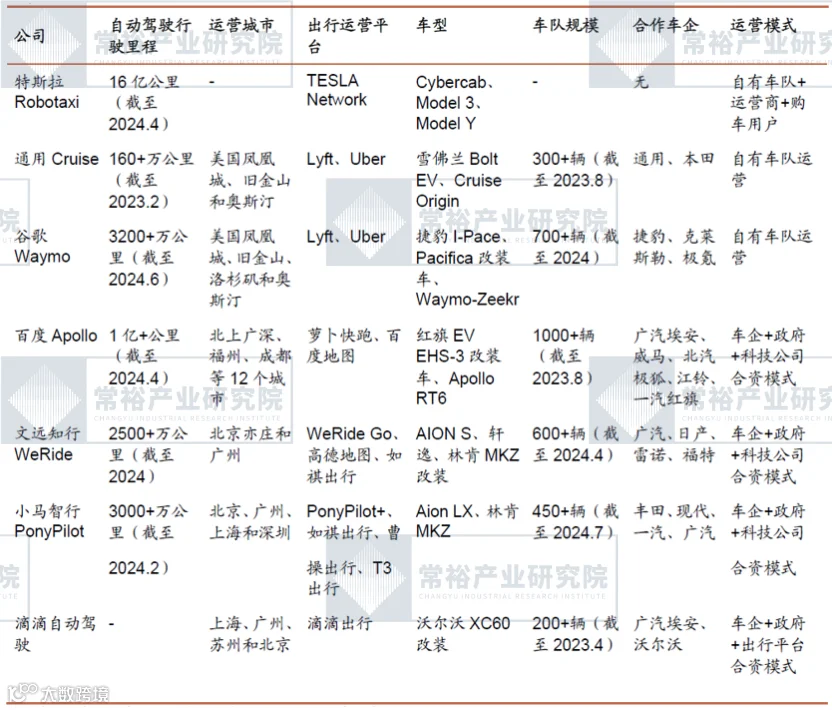
由于技术水平相对领先、政策支撑力度大、监管开放早,中美两国已在武汉、北京、上海、凤凰城、旧金山等多个城市开展Robotaxi商业化运营。目前,Robotaxi的开发企业主要分为3大类:1)互联网企业:百度Apollo、谷歌Waymo、文远知行WeRide、小马智行PonyPilot、亚马逊Zoox等;2)传统车企:特斯拉、小鹏汽车等;3)出行企业:曹操出行、滴滴、如祺出行等。
图表:Robotaxi核心玩家对比
资料来源:36氪,汽车之心,招商证券
作为一种系统级解决方案,相比单车智能,车路云一体化强调车端与路端的协同发展。2024年7月,五部委政策出台,确定了20个城市(联合体)为智能网联汽车“车路云一体化”应用试点城市,各地项目招标建设逐步落地,车路云产业化进展有望加速。
图表:20个智能网联汽车“车路云一体化”应用试点城市
资料来源:工信部,国盛证券研究所
1.是常裕新创集团旗下专注于产业研究的专门机构,拥有全职的专业团队;
2.是常裕新创集团战略发展的“指挥棒”和“一号工程”,为集团旗下产业投资、产业服务等业务提供方向;
3.持续专注于人工智能、新能源、新材料、智慧医疗、航空航天等战略性新兴产业的研究;
4.作为集团“大脑”,不以盈利为目标,只以专业为追求!