
双工位RGV调度策略优化与效率提升
随着智能仓储物流技术的发展,穿梭车(RGV)的应用越来越广泛。针对双工位RGV系统,本文提出了一种优化调度策略,并验证了其在实际应用中的效果。
一、问题提出与策略研究
在直线轨道上运行的对跑双工位RGV,由于原调度策略存在死锁现象且整体效率较低,本文提出改进方案。
1.1 系统布局
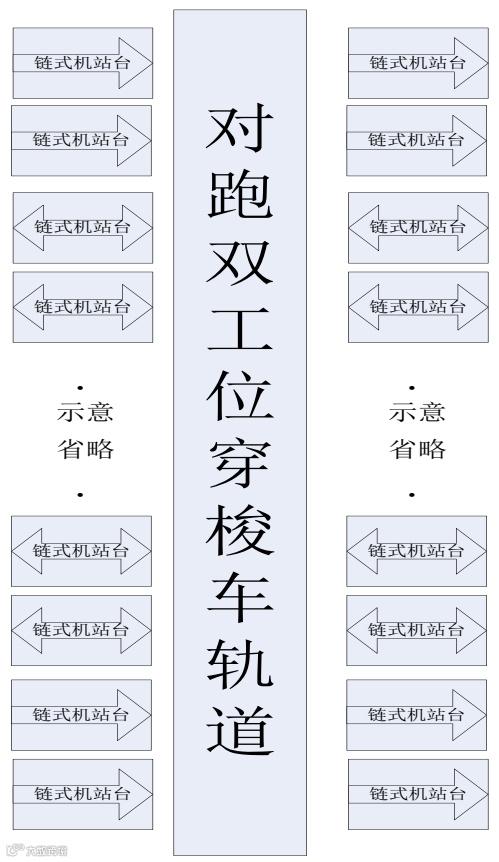
图1 对跑双工位RGV布局图
系统由对跑双工位RGV和轨道两边的输送站台组成,现场共有42个双向运行拣选站台及8个单向输送机,总轨道长59.3米。
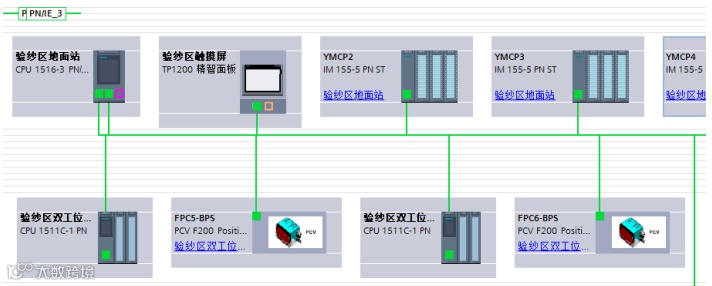
图2 网络结构图
系统采用S7-1511和S7-1516作为主控制器,通过无线以太网通讯实现控制。
1.2 调度策略研究

图3 原有调度策略
原有策略优先执行双工位任务,但存在等待时间浪费问题。

图4 调度策略优化方案1
取消等待时间T1,加入行进路线判断,解决重复区域问题。

图5 调度策略优化方案2
结合对车位置判断,形成最终调度优化策略。

图6 最终调度策略优化
新策略在生成任务时考虑双车避让,减少等待时间并提高效率。
二、原策略与新策略效率对比
设轨道长度为X,最大速度为vmax,加速度为a,站台间距为x1,接送货时间为t(接送)。
2.1 原策略效率计算



2.2 新策略效率计算



经过压力测试,新策略使双工位RGV效率提升48%。
三、结语
通过优化调度策略,系统整体效率显著提升,满足生产工艺和物流需求,为双工位RGV工程应用提供参考。