

教程前言:昨天为各位喵粉们总体介绍了喵家Robot:bit巡线、避障机器人;今天喵星人将一步步带大家怎样将Robot:bit机器人玩起来,废话不多说,开始喵星人的表演(假装大家为我
鼓掌)


超声波避障教程
首先为大家放上GIF图,效果更明显。
(有了喵家猫头超声波,完美实现精准避障)

基本原理
超声波传感器的原理就是和声呐探测一样,传感器发出超声波,超声波撞击到障碍物表面,就会反馈回声波,传感器接收到声波需要反射时间,传感器就会根据反射回来的时间计算出对应的距离,得到的值就是超声波探测的距离。其传感器的工作原理就是这样,结合我们的机器人套件,配合舵机的使用,可以完成避障动作。

接线
当大家拿到全新的Robot:bit机器人时,按照说明书的安装步骤,一步步安装完成以后,就剩下接线部分啦,接下来跟着喵星人一起动手连起来吧!
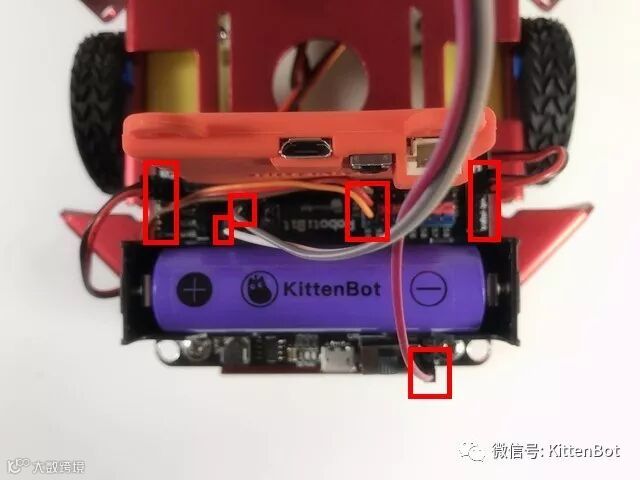
超声波数字信号脚D和Robot:bit上的I/O接口A1进行数据通讯,超声波传感器使用5V供电,所以超声波脚Vcc接Robot:bit的5V,然后把超声波脚GND与Robot:bit上的GND对应就可以了,舵机接口使用S1与9g舵机相接,按照说明书两个TT马达分别接M2的B-,B+和M1的A-,A+。总的来说如下:
舵机——S1
超声波转接板 V——5V
超声波转接板1——A1
超声波转接板G——GND
TT马达1——M2B
TT马达2——M1A
接线图如下:
超声波转接板连线

主控板连线
按照上面图片的连接,我们的避障机器人就接线完毕了,下面我们编写一下实例程序并烧录,启动!
编写程序(主程序图)

示例程序说明:
示例程序简单易上手,实现的功能也比较简单易懂,初始状态开机时舵机归位90度,Micro:bit显示屏上显示笑脸,然后进入主程序循环,将超声波引脚读取的信号设定为距离,当距离大于2,并且小于15时,所有电机停止,并且调用控制舵机摇头的函数。然后小车原地旋转,及两边的电机速度相同并按照相反方向运行运行半秒,停止所有电机,如果发现前面没有障碍物就按照直线行走。这样通过简单的编写程序就完成了机器人的摇头,避障等一系列的动作。

Robot:bit机器人套件,限时特价活动,直减50元,还在犹豫的喵粉们快来找喵星人下单吧~送给自家萌娃的第一套青少年编程机器人套件!
【Microbit Robotbit 巡线避障智能小车机器人套件】,复制这条信息¥dH4F0Mtpt8p¥后打开手淘。

对于刚入门的编程爱好者来说,这些看起来有一丢丢的复杂,在这里喵星人也为大家准备好了教程示例的程序包,点击文章末尾的“阅读原文”下载示例,即可体验。
如果在使用过程中有任何问题欢迎添加喵星人【官方QQ群号:568084773】或者直接扫码进入提问。
