

在过去的一年里,喵星人带着喵家众兄妹(自家机器人套件)参加过各种大大小小的展会;尤其是KittenBot全向轮,每次活动现场都有一大批爱好者,既然小伙伴们这么黑凤梨,那么喵星人就为各位细细讲解一次。

运动原理
一般小车只能前进后退,向左和向右转向;
但是全向轮小车可以左右横向移动;

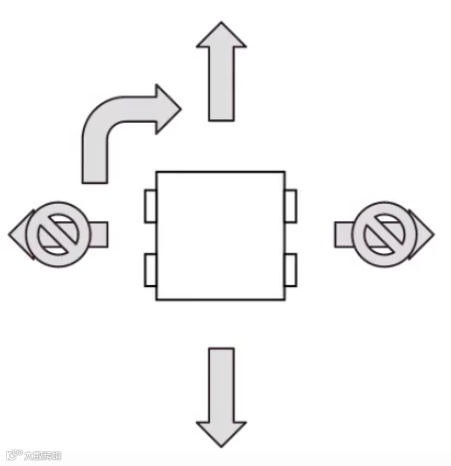
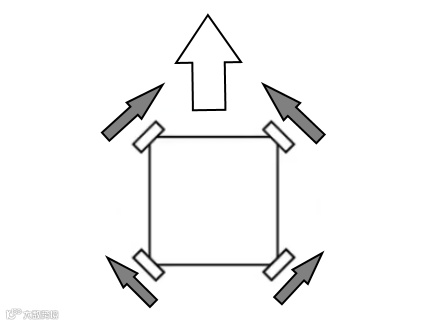
全向轮小车通过四个轮子的差速运动实现速度矢量的相互抵消;当向前运动时,横向的速度矢量相互抵消后就只剩下前进速度了;四个轮子的运动如下图;
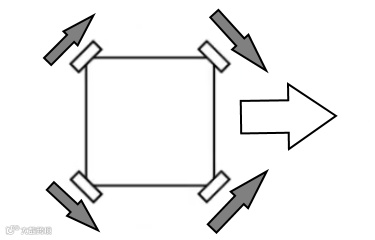
同理向右横向移动时如下图;原理一样。
 连线指南
连线指南
当我们知道轮子运动的模式,我们就可以反推接线的顺序了,我们定义左上角电机为M1,右上角电机为M2,以此类推如下图;
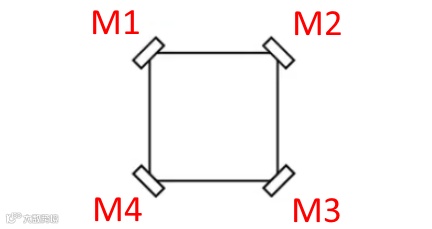
并且定义:从轮子看逆时针运动为正方向(右手螺旋法则),这样我们就可以推算出前进的时候轮子的正反方向了;(横向移动的正反向请大家跟着喵星人把脑袋扭90度看 )
)


全向轮接线如下图

(如果用RosBot主板的同学可以参考上图的接线顺序,其中M1A和M2A为黑红,M1B和M2B为红黑)(PS:后面我们会补上Microbit的全向轮接法)

全向轮四个轮子的速度
每个电机初始速度是0;
前进速度除以cos45°,M1A和M2B加上这个结果的正值,M2A和M1B为负值;
横向速度除以cos45°,M1A和M1B加上这个结果的正值,M2A和M2B为负值;
如果是顺时针旋转则每个电机都加上旋转速度,逆时针则减去这个速度。
可能很多同学看到这里已经晕了,因此我们将速度映射已经封装在Kittenblock底层了。

KittenBlock图形化编程
如果用Kittenblock编程只需要用下面这个积木方块就行了。

其中第一个参数是前进速度,第二个是横移速度,第三个是参数旋转速度。
接线完成后不要着急把车放在地板上跑,我们需要调试一下,看看接线到底有没有正确。八成以上的问题都出在接线上。
1. 连着usb线,打开Kittenblock给RosBot主板恢复默认固件;
2. 拖入上面Omni这个积木模块,将X设为100其他两个为0,单击方块;
3. 应该可以看到小车四个轮子都像上图这样向前运动(如果哪个电机反了就将对应的端子头正负反一下就行了)
4. 同理调试向右横向和旋转也是类似这样调试
确保所有电机运动方向都正确后,就可以插上wifi模块和电池愉快地玩耍了 ~
最后,如果发现小车并不是特别稳定地走一个直线,这多半是因为某个轮子跟地面贴合不紧。这是因为钣金工艺的限制,只需要将对应的钣金片稍微弯一点点就行了(一般0.5~2度就够了)。
当然更直接的解决方法是上悬挂系统,下图来自我们一个用户的DIY~


今天教程到此结束,总体来说今天的教程相比前几天是有一定难度的~
购买喵家全向轮贴心链接:
复制这条信息¥Fsb40qhopty¥后打开手淘。
欢迎点击“阅读原文”和喵星人进行交流互动;也可以通过下方留言和喵星人提问哦~