
机器人视觉
提高机器人智能化水平的关键因素
在基本术语中,机器人视觉涉及使用相机硬件和计算机算法的组合,以允许机器人处理来自外界的视觉数据。
例如,您的系统可能有一个2D摄像头,可以检测机器人抓取的对象。更复杂的例子可能是使用3D立体相机引导机器人将轮子安装到车辆上。
没有机器人视觉,机器人基本上是盲目的。但由于各种传感器的存在,这对于许多机器人任务来说不是问题,但对于某些应用,机器人视觉是有优势的甚至是必不可少的。
机器人视觉的发展
机器视觉技术是计算机学科的一个重要分支,自起步发展至今,机器视觉已经有20多年的历史,其功能以及应用范围随着工业自动化的发展逐渐完善和推广。20世纪50年代开始研究二维图像的统计模式识别。60年代Roberts开始进行三维机器视觉的研究。70年代中,MIT人工智能实验室正式开设“机器视觉”的课程。80年代开始,开始了全球性的研究热潮,机器视觉获得了蓬勃发展,新概念、新理论不断涌现。

常用的视觉传感器
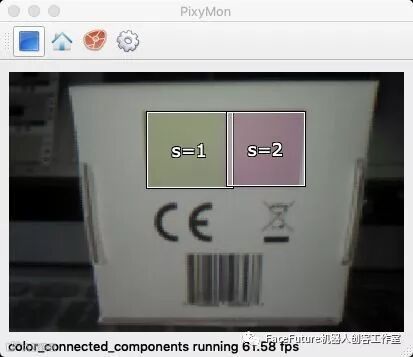
我们本次的技术推文以功能强大的pixy2(右一)为主,相比较pixy1,这款Pixy2能够让图像识别变得更容易,支持多物体识别,具有强大的多色彩颜色识别及色块追踪能力(最高支持7种颜色),就像它的前身一样,Pixy2只需按下一个按钮即可识别并记忆你教授的物体。同时,新版本增加线路追踪和小型条形码识别功能,较上一版本的Pixy反应更快,体型更小,功能更强。




以EV3为例使用Pixy2
1、下载软件
我们需要一根USB电缆供您的计算机与Pixy2通信。
(Pixy2有两个需要安装的设备驱动程序。)驱动程序安装可能需要几分钟,因此请耐心等待。
PixyMon V2下载地址:
https://github.com/charmedlabs/pixy2/raw/master/releases/pixymon_windows/pixymon_v2_windows-3.0.24.exe
https://github.com/charmedlabs/pixy2/raw/master/releases/pixymon_mac/pixymon_v2_mac-3.0.24.dmg
2、连接电脑与Pixy

3、测试

4、选择使用设备

5、连接EV3
(购买地址如下,工作室纯手工打造 【pixy的乐高线(兼容)】https://m.tb.cn/h.eWRjKuA?sm=7b1169pixy)
【pixy的乐高线(兼容)】https://m.tb.cn/h.eWRjKuA?sm=7b1169pixy)


6、安装EV3的pixy2模块
让我们通过执行以下步骤在Mindstorms EV3软件中安装Pixy2 EV3模块:
选择File➜NewProject打开一个新项目
选择工具➜,模块导入,然后选择所下载的模块
https://github.com/charmedlabs/pixy2/raw/master/releases/LEGO/Pixy2_LEGO-2.0.6.zip

7、下载示例程序,使用pixy模块


1.端口选择器:使用它来选择Pixy2插入控制器块的传感器端口1到4。
2.模式选择器:在测量和比较模式之间进行选择。
3.颜色代码:选择您希望Pixy2搜索的签名或颜色代码。
4.补光:打开或关闭灯泡。
5.代码输出:输出与您在签名输入中指定的签名或颜色代码匹配的块数。或者,如果处于常规模式,则输出检测到的对象的签名编号(请参阅下面的模式说明)。
6.X centroid:输出Pixy2找到的最大对象中心的X位置。返回的数字范围为0到255,如果面向相机镜头,则0是最右边的像素。
7.Y centroid:输出Pixy2找到的最大对象中心的Y位置。返回的数字是0到199,其中0是最顶层的像素。
8.宽度:输出Pixy2找到的最大块的宽度。返回的数字是1到256。
9.高度:输出Pixy2找到的最大块的高度。返回的数字是1到256。
10.角度:是Pixy2找到的最大对象的角度(以度为单位)。角度信息仅适用于颜色代码,否则值为0。
演示视频
喜欢请关注抖音号:FaceFuture1712