KUKA KRC5产品也已经在各大客户现场闪亮登场开启了它的“板砖生涯”,来服务客户了。如果现场PLC是非安全类型的,那么我们就要考虑去给C5控制器安全回路接线,这与KRC4的X11接口完全不一样了。那就今天来说下KRC5的安全接口和插头针脚的定义:
KRC5的焕新点
KR C5的一大“焕新点”就是优化了大量不常用的安全接口,做成了选配,这样降低了普通安全级别应用场景的客户的设备采购以及施工的成本。对这一类客户而言只需短接外部使能、控制柜急停(XG58插头),再接好安全门、急停开关(XG11.1)即可。具体接口位置,查看下图KRC5控制器的⑱和⑲接口:
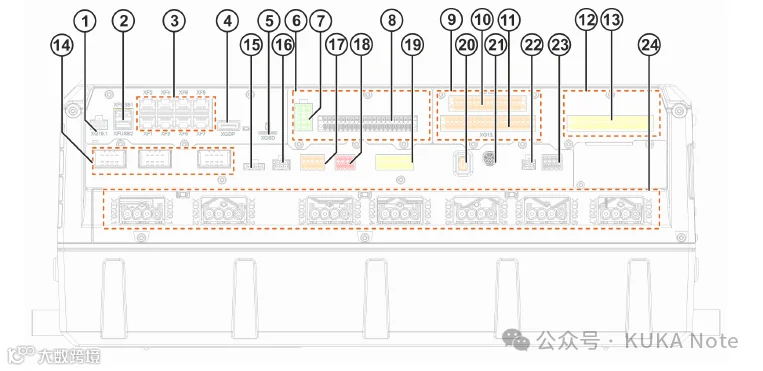
用于smartPAD连接的XG19.1接口
USB 3.0接口XFUSBI和XFUSB2
XF1-XF8“性能”系统板的以太网与EtherCAT接口。配置取决于所用系统软件。
XGDP接口,显示器端口DP1.2
用于SD卡的XGSD接口
IFBstd接口
用于外部客户接口XG12的24V电源
-XD12:24V PWR IN接口
-XD12.1:24V PWR OUT接口
XG12:连接16个数字输入输出端(I/O)的接口
IFBsafeext 接口
XG13.2离散接口
XG13.1离散接口
IFBsafe接口
X11.3:接口
制动器接口
-XD10.1轴A1-3制动器接口
-XD10.2轴A4-6制动器接口
-XD10.3轴A7(附加轴)制动器接口
XG1(预留)
XG11.2外围设备接触器US2控制接口
XG42零点标定检查接口
XG58:安全接口(2个用于外部使能装置和附加紧急停止的安全输入端)
XG11.1:安全接口(2个安全输入端,1个安全输出端)
XF21.1其他附加轴驱动控制箱的EtherCAT接口
XF21:RDC接口
XD55现场总线耦合器和交换机的27V内部电源接口
XG33(4个快速测量输入端和1个“驱动器已准备就绪”信号灯输出端)
电机接口
-XD20.1至XD20.6轴A1-6连接电机接口
-XD20.7轴A7(附加轴)连接电机接口
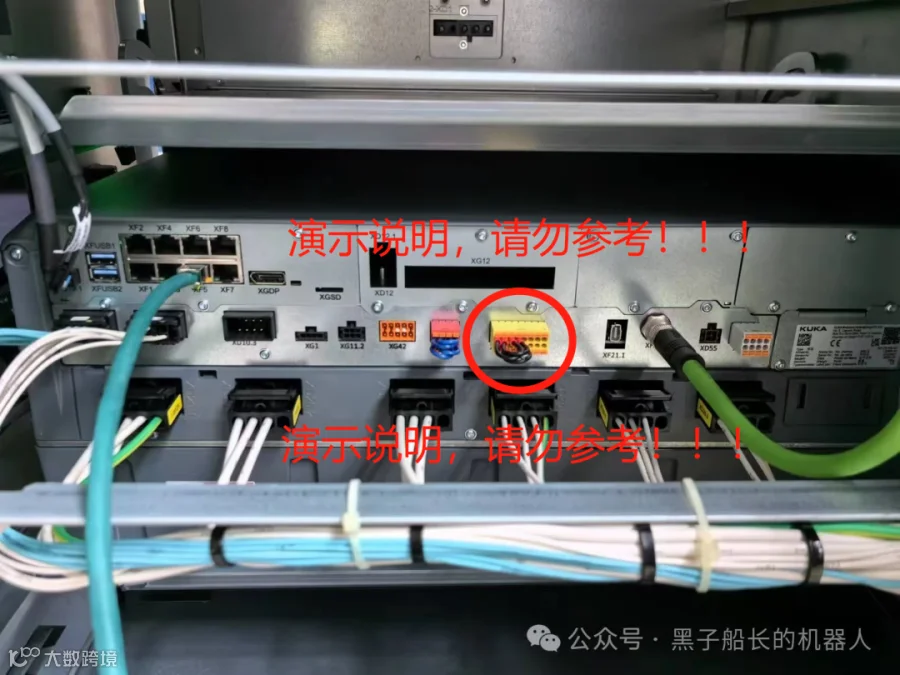
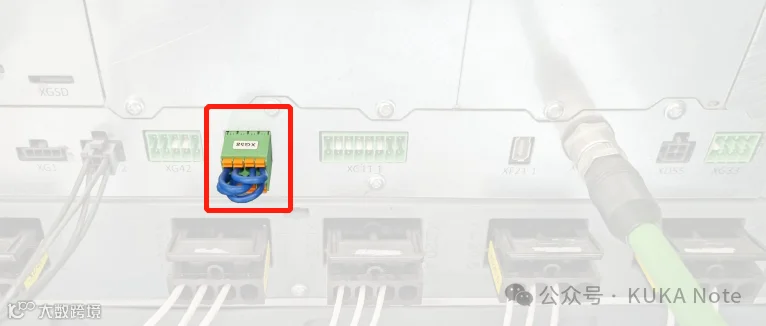
通过上面的示意图,我们和现场控制器上找到对应的XG58和XG11.1对应的插头接口:

功能一:用于连接附加紧急停止的安全输入(如下图控制柜内所有KRC5控制器的急停开关)。

功能二:用于连接外部使能开关(如下图)发安全输入,按下使能按钮可以向驱动装置发出运动许可。如果按下使能按钮保持在中间位置,则可以将轴移动到相应位置。

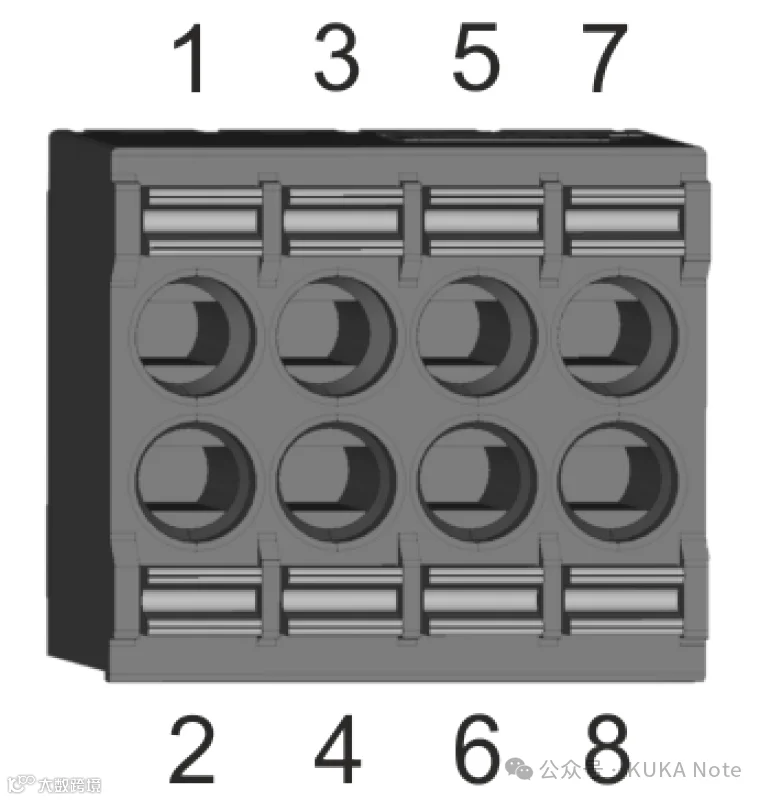
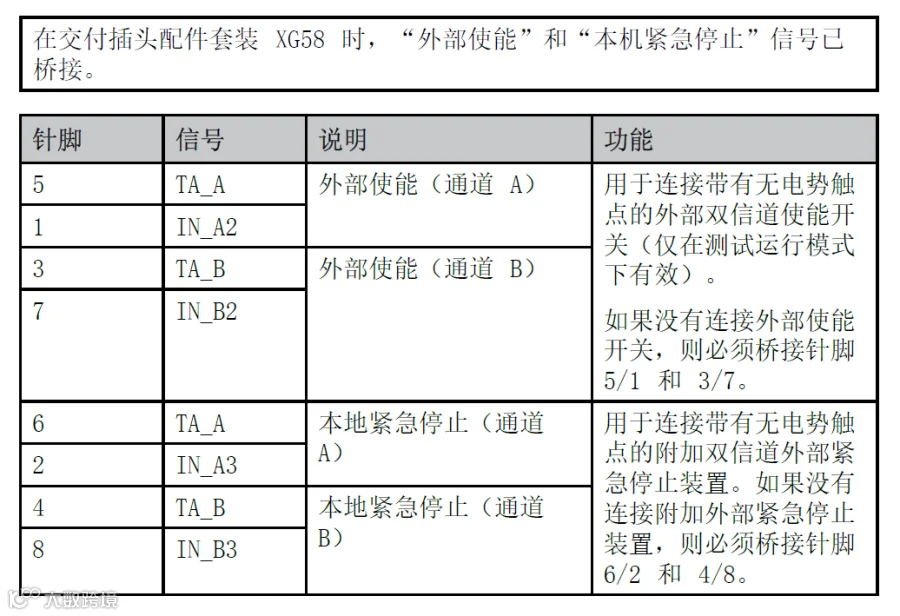
===XG58插头针脚定义===
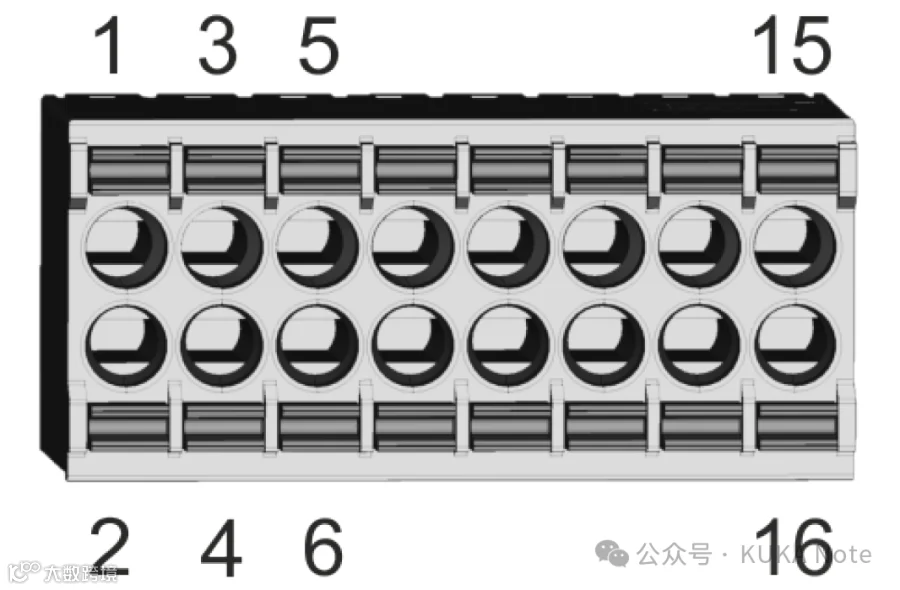
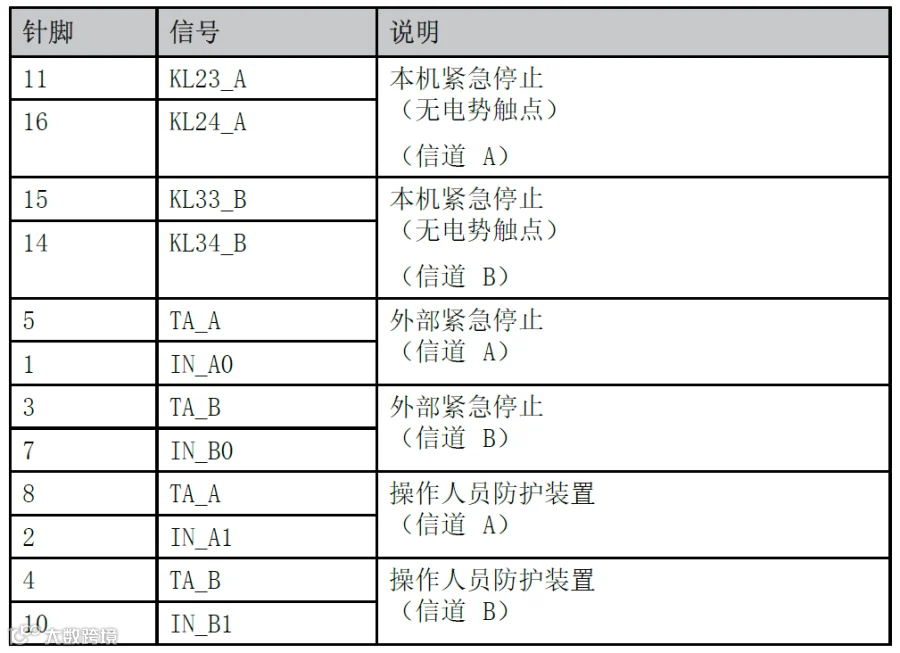
XG11.1 安全接口说明
安全接口 XG11.1 可提供 2 个安全输入端(分别是外部急停和操作人员防护装置)和 1 个安全输出端(本机急停信号)。必须通过安全接口 XG11.1 连接好紧急停止装置,或通过上级控制器(例如 PLC)互相连接起来。
===XG11.1插头针脚定义===