

(一)各轴报警代码无的情况下,控制器错误代码为101
处理方法:控制柜内部连接控制器,远程IO及伺服驱动器的两根黄色网线通讯异常导致,重新插拔网线或者更换网线后,点上位机机器人复位按钮后可消除报警。
(二)上位机左下角报机器人伺服驱动器报错,但上位机控制器及各轴错误代码都显示为0。
处理方法:重新检查控制柜中伺服驱动器CN1线缆上编号1与编号18两根线之间是否存在24V;如果没有就意味着急停回路不通存在急停因此报错。
(三)轴报警代码C90
处理方法:报编码器通讯异常,可以重新确认一下控制柜黄色网线及断电重新将伺服驱动器上通讯线重新插拔一下;如果重启还有的话可以对调伺服驱动器测试;测试仍然存在的话需要更换电机。
(四)轴报警代码910
处理方法:报轴过载,需要确认一下电机跟减速机是否存在卡顿或者外部干涉。
(五)轴报警代码820
处理方法:报编码器多圈值异常,伺服驱动器将其轴绝对编码器重置后,断电重启后还报需要更换电机。
(六)轴报警代码840
处理方法:报编码器数据传输异常,伺服驱动器断电重启后还报需要更换电机。
问题分析:可能是动力线红白蓝对应UVW相序接错或虚接。
解决问题:电机动力线接线按红U白V蓝W的顺序接线。更换动力线。

(二)运行一段时间后报警
问题分析:检查动子与定子之间是否有卡异物
解决问题:动定子如有损坏,需要更换

(三)运行几分钟后报警910
问题分析:检查串行转换单元是否匹配
解决问题:如不匹配需要更换串行转换单元
(四)上使能点动不运行,或冲出一段距离报警
问题分析:可能相序设置不对
解决问题:PN080.1参数修改
网络FTP查看报警



(一)伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位。
(二)直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
(三)交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
(四)伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。
出现下列情况均需要重新标定
1、相机本体位置发生变化
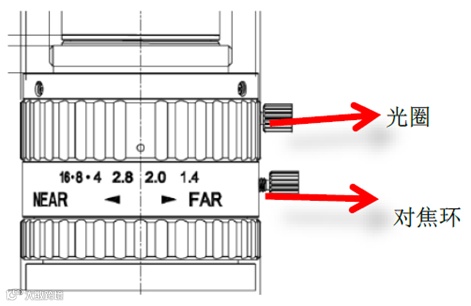
2、相机光圈大小发生变化-------------------位置如下图
3、相机对焦环位置发生变化----------------位置如下图
4、机器人位置发生变化
出现下列情况不需要重新标定
1、偏转镜脏污,擦拭偏振镜------位置:镜头下方;
2、更换片源、切换CCD程序。

注意:
若标定成功后,在任何条件下都不要直接替换D:\CCD文件夹,只把需要的拷贝至D:\CCD目录下即可。正常只需替换Debug文件(CCD界面文件)和050.ivr文件(CCD检测程序)。

作者:沈工
工程服务部
技术服务工程师


