

今天分享一下作为机器人应该怎样模仿禽兽们的步伐。还有,禽兽就是禽兽,大家千万别想多了!
前一阵子,Atlas机器人横扫朋友圈,但不懂科技的七大姑八大姨都为Atlas“跨世纪性的趴起”转发的同时,还不忘吐槽一句:“走路走这么丑,爬起来的姿势也这么丑……还敢说什么黑科技!”

大婶们,你真的是冤枉我们家Atlas了!虽然大自然给了科学家们,很多标本性的参考资料(动物、人等),但让几公斤重的铁皮迈出步子也并不是那么简单的事情。
癫疯君觉得有必要提取“机器人仿生步态”这一知识点科普一下。
初学者入门其实并不是很难,很多机器人爱好者,都会选择从制作蜘蛛、昆虫等简单的动物模拟开始玩起,因为他们的步态和身体结构可以很直接的作为机械版本的模拟。而且骗扁平化结构,会比较简单的借鉴、改造。

▲此六足蜘蛛,作者选择了“曲柄结构”,制作了铁质蜘蛛的移动(行走)平台。

▲此八足蜘蛛,是运用了齿轮传动和连杆的结构
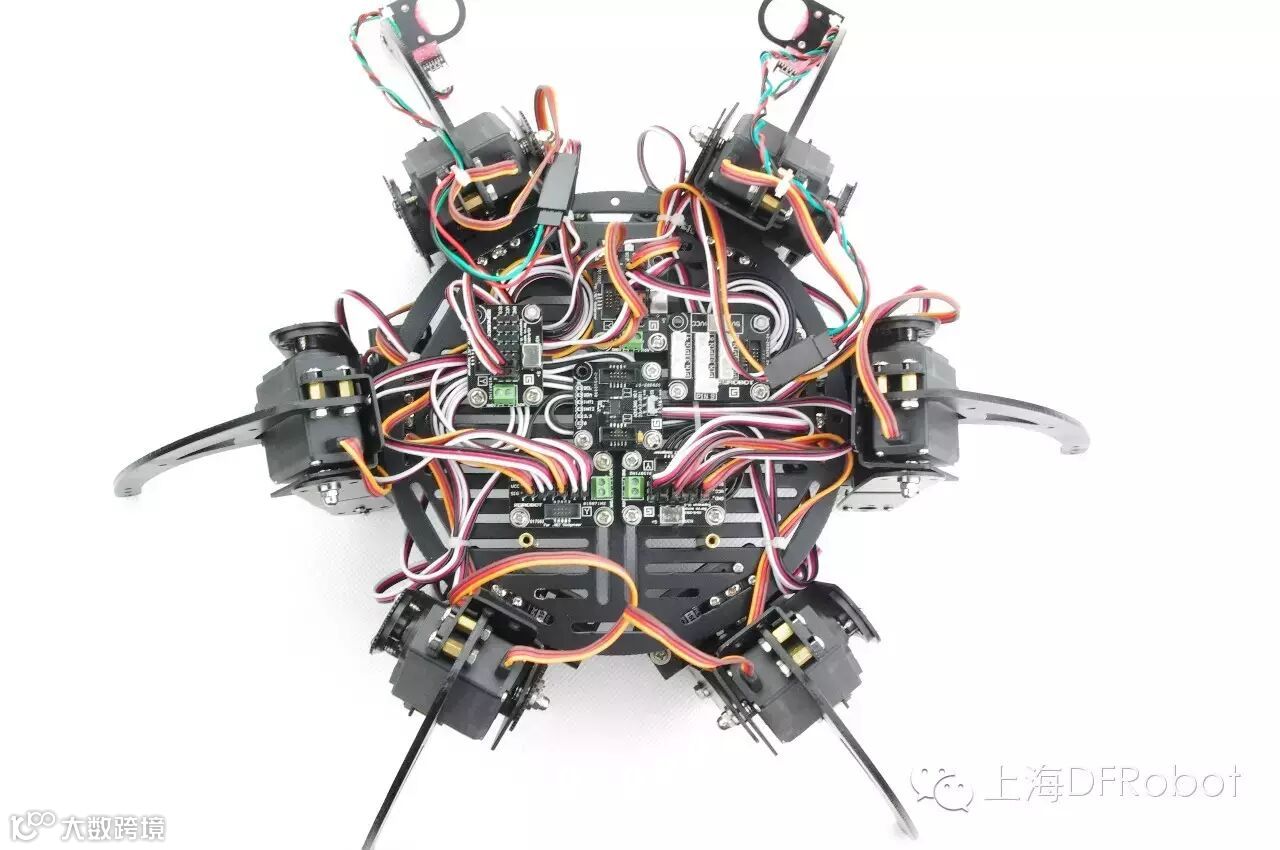
▲此八足蜘蛛,作者选择了每条腿关节都独立的结构
以上的3只蜘蛛,虽然都是模拟仿生,但运用了不同的结构,行走状态完全就不一样了。把昆虫类玩一遍其实还是比较简单的。(以上多足蜘蛛教程请登录DF创客社区查询)
玩好昆虫类的,可以继续追求昆虫仿生极致,也可以进一步学习一下难度大一点的大型四足动物,四足动物相对于蜘蛛类的仿生,用通俗的讲就是底盘高(疯癫君被自己的智商惊到了( ⊙ o ⊙ ))。
在更复杂、未知的自然环境中的适应能力明显大于轮式和履带式等移动机器人。它仅需要有限的支撑点就可以进行作业,而且在近年来的研究中四足步行机器人向着小型化、智能化、仿生等发面发展。
本文提出了一种四足仿生步行机器人及其控制策略方法。通过运动学、动力学、步态及稳定性分析不断优化步态分析,在结构上机器人腿部采用3D打印件,其中驱动是利用舵机控制。
姑且叫它圣诞狗吧(虽然按了个鹿头)~以下详细介绍一下四足动物的仿生行走步伐。

可以先戳视频:
开始进入正题吧,一大波禽兽图迎面扑来!
脚类动物运动其本质是移动重心,一般四肢动物的行是有一定的规律的。以马为例,开始起步时如果是右前足先向前开步,对角线的左足就会跟着向前走,接着是左前足向前走,再就是右足跟着向前走,这样就完成一个循环。此四足机器人是有10个自由度的,其中1个是头部自由度、另一个是腰部自由度,还有8个是腿部自由度。每条腿是两个自由度,这样就可以比较轻松的抬起来和放下去,是靠静摩擦不是靠动摩擦前进,这样就比较好的模拟动物行走的步态。在每条腿行走的过程中,利用身体的平衡把重心向前移动。
步态分析

步态分析是一种对动物肢体运动的系统研究即是指人或动物通过肢体运动并前进的一种周期性的形式和样子。(如行走,奔跑,脚步移动等)。步态就是描述人走路特点的一种周期性现象,并且每个周期可以被分为多个部分进行分析。
(一)、踢类四肢动物

①踢类动物较掌类动物稳定性较差,所以一般行走的话是三只脚着地。因为需要三条腿进行支持,也就是需要三角形进行平衡。先抬起右后脚→右前脚→左后脚→左前脚→右后脚。

下面是行走的三角图形其中三角形的三个角表示三只脚,圆圈表示抬起的脚。在运动的过程中把重心整体向前移动。

②关节的运动:
腿抬起的时候大腿关节先抬起,同时小腿关节弯曲,这样是为了能够很好的抬起。然后再向前迈进,再放下,在这过程中同时每条大腿把重心向前移动。

③腰部动作
走步时由于腿关节的屈伸运动,身体稍有高低起伏。从俯视角度看,肩部线和臀部线成交替向前的状态,身体也随之扭动。从下图可以比较清楚的看出,当迈左脚时腰部向右转,同样的迈右脚的时候腰向左转。

④头部
头部会上下略有点动,一般是在跨出的前脚即将落地时,头开始朝下点动,前脚伸直时头朝上。

(二)掌类动物

掌类动物,因为有脚掌可以作为平衡支点,所以可以两条腿一起动。在行走较快的话,两条腿可以保持平衡,就是可以两条腿进行交替进行运动


下面是掌类动物四条脚掌运动图,四条线的四个端点表示动物的四个脚 ,其中实线表示对角线着地的脚,虚线表示抬起的对角线脚。这样交替运动就会比较快的向前运动。

此次四足狗的步态对应的舵机角度——前进步态程序角度分析
是先按照1→2→3→4→1大的步骤行走,其中每个步态中又包括(1)→(2)→(3)小步态进行行走。在行走的同时其它脚也在动,是为了把重心向前移动。file:///C:/Users/free/AppData/Local/Temp/ksohtml/wps4EAF.tmp.jpg
下面是步态对应的是舵机的角度值

机械结构分析
此四足机器人共有10个自由度,,其中1个是头部自由度、另一个是腰部自由度,还有8个是腿部自由度。每条腿是两个自由度,这样就可以比较轻松的抬起来和放下去,是靠静摩擦不是靠动摩擦前进,这样就比较好的模拟动物行走的步态。在每条腿行走的过程中,利用身体的平衡把重心向前移动。所以要使得
下面是身体的3D打印件,要注意腰部有一个关节,腰部关节很重要。在设计的时候要注意,结构的牢固性,腰部的承受力比较大。
①身体


②大腿——四足机器人的大腿比较重要,需要承受较大的力量,所以设计的时候牢固性一定要注意。中空的地方是舵机的,其它小孔是固定螺丝。



③小腿——设计的时候,脚掌要设计比较大一点,这样稳定性好一点。在3D打印的时候,要注意镜像问题。


④组合——小腿和大腿结合起来然后再安装身体上。

其它动物运动过程
(一)、 动物奔跑的基本特征为:
动物奔跑与走步时四条腿的交替分合相似。但是,跑的愈快,四条腿的交替分合就愈不明显。有时会变成前后各两条腿同时屈伸,着地的顺序:前面两腿先着地。即前左、前右、后左、后右。脚离地时只差一到两格。

(二)、家禽类
1、鸡的走路特点为:
(1)双脚前后交替,身体左右摇摆
(2)为了平衡身体,头和脚协调的关系为:当一只脚抬起到
中间,头向后收,当一只脚刚抬起时,头向前伸。
(头和脚动作前后时间差一格或二格)
(3)脚爪离地抬起向前伸展时,趾关节呈弧线运动。

(三)、飞禽类——转化流动的气体为升力
鸟类在空中的飞行动作是流线型的,在空中消耗最小的能量,它凭借着气流的方向,帮助飞翔动作,飞翔时腿部蜷缩着紧贴身体或朝后拖曳着。

小鸟飞行中常常是夹翅飞窜,然后急速扇动双翅.

小鸟快速飞翔时,翅膀扇动频率高,常用流线表现。飞行时形体变化小在大鸟飞行中,还要注意身体和尾部的运动。飞翔中身体不是固定不变的,而是上下的移动。当翅膀向上时身体向下,当翅膀向下时身体上升。尾部起平衡作用,翅膀向上,尾部也向上

昆虫的种类繁多,按其动作特点来看,可分为以飞为主、以爬为主和以跳为主三种类型。
(四)、以飞为主的昆虫
①蝴蝶,画蝴蝶飞舞的动作时,应先设计好飞行路径,其路径呈现不规则的线。注意避免过于机械。一般翅膀一张向上,一张向下。两张之间的距离大约为一个身体的幅度。中间可以不加动画或只加一张动画。

②蜜蜂和苍蝇,蜜蜂和苍蝇只有一对翅膀。飞行动作比较急促,双翅扇动频率较快。翅膀扇动在同一张画面上,可以同时画出上下两对翅膀,前一张翅膀向上画实向上画虚,后一张与之相反,向上画虚,向下画实。上下翅膀间还可以画几根流线,表示翅膀的快速扇动。飞行一段时间后,还可以让身体在空中停顿,只要画出翅膀不停上下扇动即可。

③蜻蜓,蜻蜓的特点是头大身子细翅膀长。在飞行时一般不能灵活转变方向,动作姿势也变化不大。蜻蜓的飞行速度很快,画它飞行时,在同一张画面的蜻蜓身上,同时画出几个翅膀的虚影。

(五)、鱼类
鱼类因生活在水中,其身体也呈现流线型,主要靠鱼鳍的推动使身体在水中向前游动。鱼身摆动时的各种变化成曲线运动状态。按照鱼类运动特点,可分为大鱼和小鱼。
①大鱼
大鱼的身体又大又长,鱼鳍相对较小。在游动中身体摆动的曲线弧度较大,动作缓慢稳定。大鱼在水中,身体常常不动或少动,在受到惊吓时会突然加速窜逃。
②小鱼
小鱼的身体短小或狭长,动作灵活、变化较多、节奏短促,常有停顿或突然逃窜。曲线弧度不大,特别是在快游时很难看清鱼鳍变化。

(六)、爬行类和两栖类
爬行类分有足和无足两种。有足的爬行动物例如乌龟、鳄鱼、蜥蜴等。其特征为四足短小,身体靠近地面,爬行时,四肢前后交替运动、动作缓慢,头部左右摆动较大,尾巴呈现波形曲线运动。

无足的爬行动物如蛇,其身体圆而细长。他的行动靠轮流收缩脊骨两边肌肉进行。它的运动特点是身体向两旁作S形曲线运动,头部微微离地抬起,左右摆动幅度较小,尾巴越向后面,其摆动幅度就越大。

开源代码(请点击文末左下角”阅读原文“查看)
作者分析了各种类型动物的行走形态,真可谓超级干货,你要去创新一款机器人,必须从亲手做一款机器人开始,哪种结构去表现,需要科学爱好者自己去实验,完全了解了怎么仿生四足动物,你就可以尝试仿生人类了,期待中国的Atlas早日诞生!也欢迎不同形态的仿生机器人作者 积极投稿 ,积极交流!
【择词】
从简入难,从难至极。
你不动手,即便你认真读完也永远是一篇别人的干货罢了。
作者其他佳作(点击可阅读):
合作及转载可联系luna姐姐微信:lianlianyigui
邀你一起分享创造的喜悦!

一个人玩自己的项目,
你只是技寞宅;
一群人看你玩项目!
你才是技术牛!
快来分享你的项目