
项目作者:源代码
整理编辑:Luna
如果你以为是标题党,那让你失望了!
不仅只要200块
做个BB-8只需要13步!
我们就是这样的创客!
这次分享的是源代码君的新作
他最近用了大约200块
做了个3D打印的、可以用手机控制的BB-8玩
他呢,一直是社区比较低调的大牛
此处省去一千字的滔滔不绝的崇拜……
直接上他往期的代表作,自己体会吧!
(点击下方蓝字可直接阅读)
……
其他作品有兴趣的自己去社区找寻哦~
正式进入DIY BB-8机器人课堂吧!
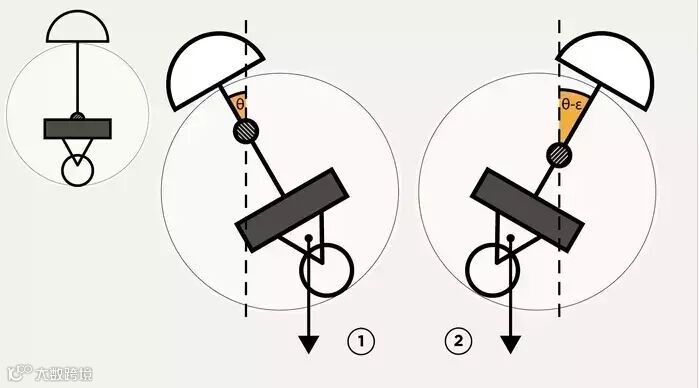
其实之前猜测颇多,但直到Sphero的一份专利曝光,从而揭露了BB-8的工作原理。与外界认为BB-8的两个球之间是相互独立工作不同,这份专利透露它们实际上是一体的。
在这份名为“磁性耦合的自走式装置”专利中,球体的内部会有一个重力装置,由两个轴轮马达与一个保存垂直的桅杆组成。轴轮马达在运动的过程中,会让球体重心发生偏移,从而影响球体的运动。它的工作原理就是和太空球类似,当有物体进入时,通过改变位置会导致球体的重心变化,最后会导致球的旋转和向前运动。


说到头的部分,很多人以为它是在不断地向后运动来让自己保持向上的状态。实际上它是采用了磁悬浮的技术,在BB-8身体内部的桅杆上面装有磁铁,所以它始终能与球体重心保持在同一个水平线上,所以我们可以看到,在BB-8运动过程中,它通常是倾斜的,这是由于重心在行进过程中总是倾斜的。
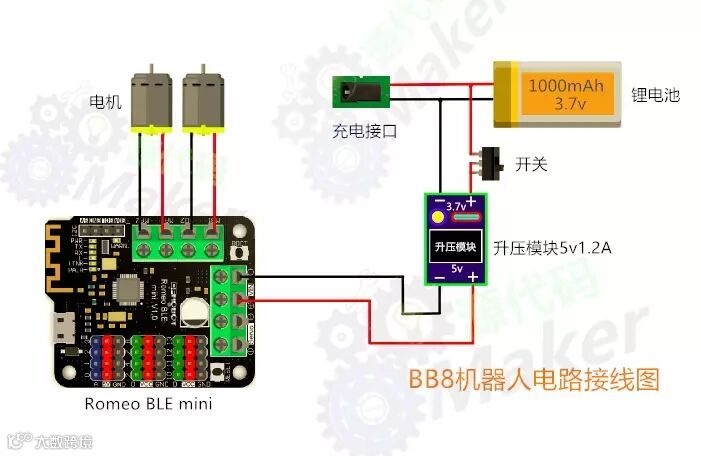
本次教大家制作的BB-8机器人属于mini版,身体主要结构都是通过3D打印机打印,控制单元采用了DFRobot的Romeo BLE mini 控制器,这款控制器小巧且功能强大,在继承了RoMeo BLE所有功能的同时,还集成了蓝牙4.0通信、3pin传感器接口、2路电机驱动,所以对空间要求非常苛刻的项目,这款迷你的控制器绝对是不二之选。
除此之外,控制采用手机GoBLE APP与Romeo BLE mini板建立通信控制BB-8,电源方面我利用一块1000mAh3.7v锂电池作为动力,由于Romeo BLE mini控制板工作电压最低不能低于5v所以这里需要5v的升压模块,首先看我画好的电路。

啰嗦了一大堆现在原理也知道了,那就开始造吧~~
准备材料


01
电机固定于底盘
首先将两只电机分别装入底盘电机座中,并用502胶水进行固定,焊接上电机导线。


02
拼装大轮胎
将打印好BB-8轮毂上挤上玻璃胶制作轮胎,对玻璃胶进行适当的整形,放在通风处1小时玻璃胶就干了,当然如果你不想等待也可以用吹风机吹10分钟就行。

把传动大齿轮粘在轮毂上,插入光轴粘合为了防止轴孔错位。


03
安装小齿轮
把打印好小齿轮分别装在两个电机轴上,用胶水固定。

04
安装大齿轮
将直径4mm的光轴插入底盘中间,分别装入转轮,垫圈以及用笔套制作的轮档。


05
安装固定电机盖
装上电机盖并把电机导线穿入盖板,上好固定螺丝。


06
硬件部分-固定控制板和电池
依次装上尼龙螺柱、电池、Romeo BLE mini控制板,电池底部用少量热熔胶固定。



07
安装同步轮支架
装入同步轮支架用1x10的螺丝固定,同步轮轴用3x30的螺杆装入用502胶水固定



08
烧录程序代码
用USB线将Romeo BLE mini控制板与电脑连接,上传BB-8控制程序代码。
【代码请点击原文后,拖到文末查看,并自行下载。】
09
焊接好所有模块
将开关、充电接口、升压模块按照电路图接线焊接布线,全部按照在电池层并用热熔胶固定。把两个电机导线分别接入Romeo BLE mini控制板MA1、MA2、MB1、MB2,升压模块输出端分别接VIN端正负极。


10
安装强磁铁石


11








12
制作头部


13
外壳+磁性耦合重力驱动装置安装


END




*如需转载,请联系小编lianlianyigui
推荐阅读:
评论有奖
微信公众号启动每周一次的 最佳评论手 活动喽!
点赞数最多的‘段子手’将获得当期的奖品!
第一期的【评论有奖】截止时间是8月29日!
小编将选出点赞最多的“评论段子手”
将送出DFRduino UNO R3和多功能便携工具卡各一个

获奖者小编将以评论回复的形式与你联系哦!并尽快寄出礼物!
DFRobot创客社区
邀你一起分享创造的喜悦!
登录www.dfrobot.com.cn
快来分享你的项目

