
作者:SC.明阳
资料来源:www.dfrobot.com.cn
热腾腾的夏天到了,如此勤奋的我怎么只去啃啃冰棍呢,希望能设计一个小物件有趣的东西,送给木讷的我,至少也得呆萌。企鹅说,偶,偶可以帮到你么......

企鹅步是它很重要的一个呆萌神功,所以我在设计的过程中着重实现这个动作。当然了,它的样子也会让一些人儿内心融化的。
在制作过程中我有了一个惊喜的发现,机器人摇头的时候,舵机运动和木质部分的摩擦会发出”jiji…...jiji”的声音,像是企鹅语,省了很多功夫呀。
主板选择上,我用的是DFRobot公司的ROMEO BLE mini主板,它足够袖珍,也自带电机驱动,很适合做一些小型,需要控制的东西。
来看看呆萌的企鹅步吧:
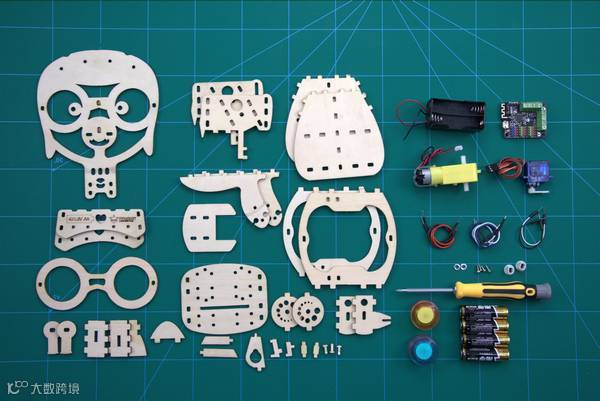
所需硬件
兼容Arduino 的RoMeo BLE mini主板(板载了两路电机驱动,蓝牙、舵机单独供电)
TowerPro SG90舵机
直流 1:120 减速电机 双轴6v
企鹅机器人木质架构
3d打印连接件*2
3d设计
与激光切割用CAD文件如下:(模型下载:点击“阅读原文”后原文处下载)


在最后,如果有液晶显示和DS18B20数字温度传感器也可以对企鹅进行升级,可以知冷暖。
制作过程
1、拆取木质部件

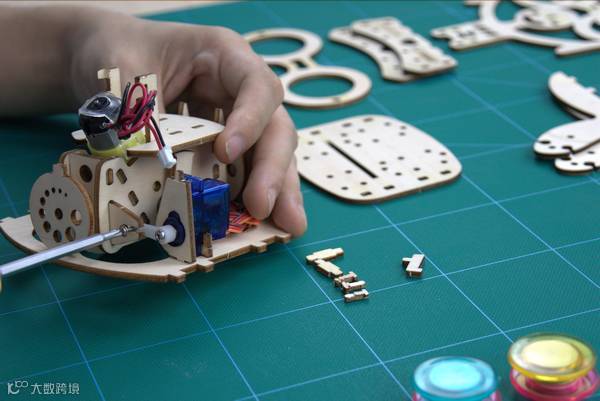
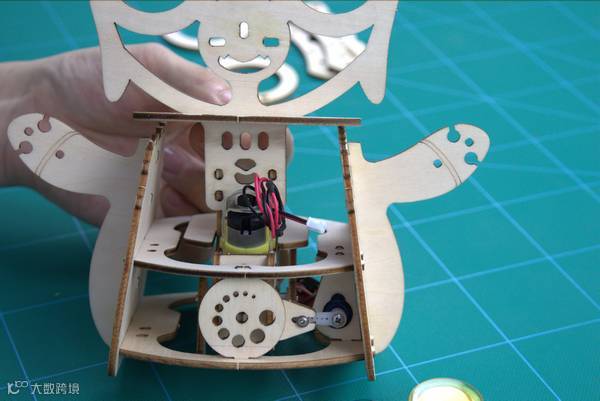
2、搭建企鹅机器人的动力部分
固定好直流电机

安装3D打印电机轴固件

电机双轴上固定的企鹅“脚丫”呈180°


3、运动方向控制部分


安好旋臂的舵机固定在舵机支架上

连接舵机和直流电机支架
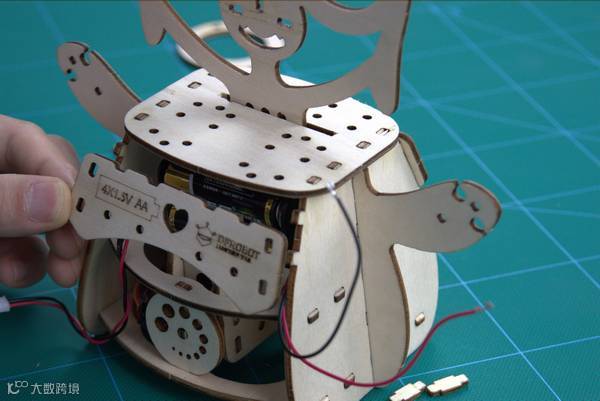
4、整体结构组装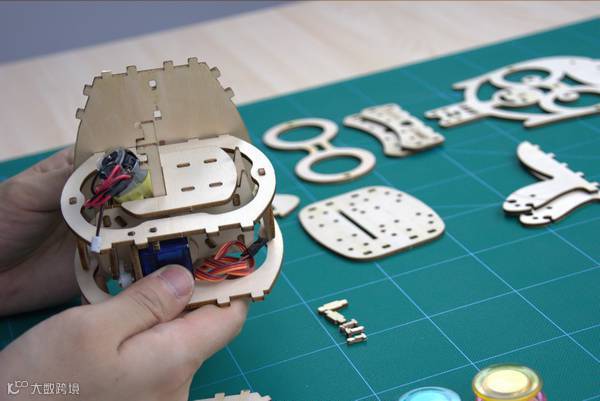

将企鹅的头部固定在预置的卡扣中

置入放好电池的电池盒,整理一下线头
5、最后的形态
再添入两枚彩色的双眼

6、电路连线

*欢迎转发朋友圈。如需转载,请注明出处和原作者。
更多项目干货戳这里
萌妹纸的体感猫耳朵 | 3D打印银河护卫队萌宠Groot


点击“阅读原文”,下载源代码