
一起成为技术颜控
作者:szjuliet
来源:www.dfrobot.com.cn
相关文章:
Pixy CMUcam5图像识别传感器教程(一):教PIXY识别物体
如何与Pixy对话
本教程详细说明PIXY如何与Arduino进行通信。
Pixy目前对以下微控制器提供软件支持:
Raspberry Pi
libpixyusb,易于移植,而且USB是速度最快的接口。
如果控制器不支持USB但支持SPI,可以使用SPI接口与PIXY通信, 它通常比I2C和UART更快
如果控制器不支持上述接口但支持I2C,可以使用I2C接口与PIXY通信, 它与UART串行速度大致相同但更灵活
如果控制器不支持上述接口但支持UART串口,可以使用UART接口与PIXY通信
如果控制器不支持以上任何接口,可以使用模拟和数字输出接口,它们是最简单的接口!
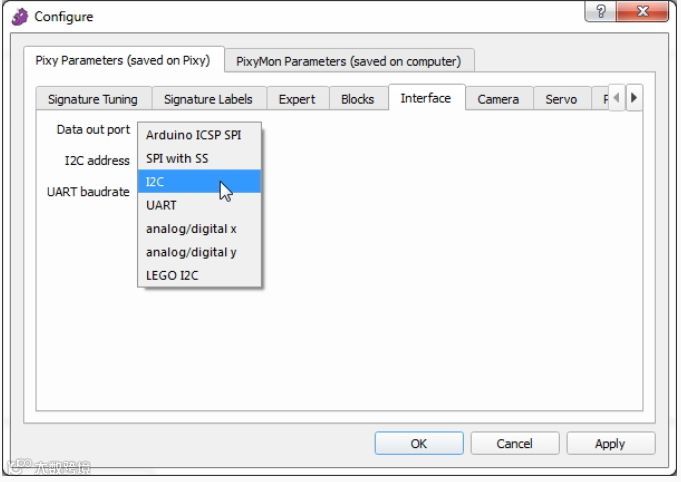
设置接口
通过软件PixyMon可以对接口进行设置。 在“Interface”选项卡中的“Data out port”选项可以对接口进行设置。
注:如果运行的是乐高固件,在PixyMon里是没有接口选项卡的。如果希望在非乐高主控上运行Pixy Lego,可以参考:
接口说明
Arduino ICSP SPI - 这是使用3针数据线的默认接口,接在PIXY上的是1、3、4引脚,用于通过ICSP连接器与Arduino通信。此版本的SPI不使用从选择信号。
带SS的SPI - 和Arduino ICSP SPI相同,不同之处在于它通过引脚7(SPI SS)支持从选择。在发送/接收每个字节之前,需要将SPI SS驱动为低电平。
I2C - 这是一个多点2针接口,接在PIXY上的5和9引脚上,允许单个主机与最多127个从站(127个Pixys)通信。可以通过接口选项卡中的“I2C Address”来配置I2C地址。
UART - 这是常见的“串行接口”,接在PIXY上的1和4引脚上。 Pixy通过引脚1(输入引脚)接收数据,并通过引脚4(输出引脚)输出数据。可以通过接口选项卡中的“UART Baudrate”来设置UART的波特率。
模拟/数字引脚 x - 引脚3输出模拟信号,代表PIXY获取的最大检测对象的x值,范围为0到3.3V。引脚1输出数字信号,判断是否检测到物体。
模拟/数字引脚 y - 引脚3输出模拟信号,代表PIXY获取的最大检测对象的Y值,范围为0到3.3V。引脚1输出数字信号,判断是否检测到物体。
LEGO I2C - LEGO Mindstorms EV3或NXP控制器使用这种模式。虽然是I2C接口但使用的是LEGO协议。
注:USB接口及其协议始终处于启用状态,而上面这些接口在给定时间内只能启用一个。
各种接口说明
下图是PixyI / O连接器的引脚图,所有串行(SPI,I2C,UART)和模拟/数字接口都可以使用。

Pixy背面的 I/O 端口的引脚按以下顺序排列,左上角是引脚1:
1 2
3 4
5 6
7 8
9 10
引脚1:SPI MISO,UART RX,GPIO0引脚2:5V(输入或输出)
引脚3:SPI SCK,DAC输出,GPIO1
引脚4:SPI MOSI,UART TX,GPIO2
引脚5:I2C SCL
引脚6:GND
引脚7:SPI SS,ADC输入,GPIO3
引脚8:GND
引脚9:I2C SDA
引脚10:Vin(6~10V)(上图标注有误,见下图)

SPI
ICSP SPI接口作为SPI从器件来使用。该接口围绕Arduino的ICSP端口设计,Arduino的这个端口没有从选择信号。默认数据速率为1M bits/秒,可以通过修改Pixy Arduino库中的Pixy.h文件来增加此速率。该协议具有校验和来处理位错误。特别提醒,SPI线缆是没有被屏蔽的! Pixy支持的特定SPI类型有:
ICSP SPI接口作为从属SPI进行操作。它是围绕Arduino的ICSP端口设计的,该端口没有从机选择信号。默认的数据速率是1 Mbits/秒,但是可以通过修改Pixy Arduino 库中的Pixy.h文件来提高这个速率。协议有校验和来处理位错误,但是要记住带状电缆没有被屏蔽!Pixy支持的特定类型的SPI有:
数据首先发送最重要的位空闲时SPI SCK为低电平数据位被锁定在SPI SCK的上升边缘从机选择为低电平有效3.3V输出,5V耐压
Pixy还支持具有从选择的SPI(带SS的SPI,slave select)。
如果没有PIXY提供的Arduino SPI线缆,可以用下面的方法将将PIXY通过SPI连接到主控板:
引脚10➜控制器的GND
引脚1(SPI MISO)➜控制器的SPI MISO信号
引脚4(SPI MOSI)➜控制器的SPI MOSI信号
引脚3(SPI SCK)➜控制器的SPI SCK信号
引脚7(SPI SS)➜控制器的SPI SS信号(如果使用带SS的SPI)
I2C
I2C接口作为I2C从器件工作,需要轮询。
通过R14和R15电阻,SDA和SCL信号上有低至4.7K的电阻将电压上拉至5V。
I2C信号具有5V容限。
可以在PixyMon的“Configure Parameters”对话框的“Interface”选项卡中配置I2C地址
Arduino中有使用I2C的示例。在Arduino IDE中选择File➜Examples➜I2C来运行。需要使用杜邦线来连接各个引脚。
控制器的I2C与Pixy连接方法:
引脚10➜控制器的GND
引脚9(I2C SDA)➜控制器的I2C SDA信号
引脚5(I2C SCL)➜控制器的I2C SCL信号
注意,当通过I2C与多个Pixy通信时,需要为每个Pixy配置不同的I2C地址,这样才不会引起冲突。可以制作“多重压合电缆”(multi-crimp cable):使用一条10芯的带状电缆并将其压接到N个10针的IDC连接器上并插入N个Pixy的引脚。也就是说,当选择I2C作为接口时,Pixy的I/O连接器上的所有信号都会进入高阻态,不会相互干扰、浪费电力等。
UART
UART接口有8个数据位,1个停止位,无奇偶校验,无握手
可以在PixyMon的Configure对话框的“Interface”选项卡中配置波特率
RX信号(引脚1)为5V限压输入
TX信号(引脚4)为0至3.3V信号输出
支持高达230 k的波特率。
Arduino中有一个使用UART串行的示例。 在Arduino IDE中选择File➜Examples➜uart来运行。 需要制作一根特殊的连接线缆。
以下是如何将控制器的UART连接到Pixy:
引脚10➜控制器的接地信号
引脚1(UART RX)➜控制器的UART TX输出
引脚4(UART TX)➜控制器的UART RX输入
模拟和数字输出
Pixy具有单独的模拟(DAC)输出,因此其模拟/数字输出有两种模式。
模式4将最大检测对象中心的x值输出到 I/O 连接器的引脚3。
模式5将最大检测对象中心的y值输出到 I/O 连接器的引脚3。
检测到物体时,引脚1为高电平(3.3V),未检测到物体时,引脚1为低电平(0V)。
Pixy的数字输出为0至3.3V逻辑值,可以提供/吸收5 mA电流。
Pixy的模拟(DAC)输出范围在0到3.3V之间,阻抗大约为200欧姆。
Pixy的模拟(DAC)输出电压直接与图像中的物体位置成线性比例(取决于模式)
在模式4(x模式)下,在PixyMon透视图中,如果对象位于图像的最左侧,则模拟输出为0V,如果对象位于图像的最右侧,则模拟输出为3.3V。
在模式5(y模式)下,在PixyMon透视图中,如果对象位于图像的最底部,则模拟输出为0V,如果对象位于图像的最上方,则模拟输出为3.3V。
以下是将控制器的ADC和数字I / O连接到Pixy的方法:
引脚10➜控制器的接地信号
引脚3(DAC 输出)➜控制器的一个ADC输入信号
引脚1(GPIO0)➜控制器的一个数字输入信号
注意,Pixy上的所有数字输出信号都是3.3V CMOS逻辑值。 Pixy上的所有数字输入信号均为5V限压。
串行协议
无论使用的是SPI、I2C还是UART串行,协议都是完全相同的。
该协议是数据有效的二进制。
每个帧中的对象按大小排序,最大的对象优先发送。
可以配置每个图像帧发送的最大对象数(参数为“Max blocks”)。
SPI和I2C工作在“从模式”,依靠轮询接收更新。
没有检测到对象(无数据)时,如果接口是SPI或I2C,Pixy会发送0(因为Pixy是从属地位,必须发送一些东西)。
每个对象都在“对象块object block”中发送(见下表)。
对象块中的所有值都是16位字,从最小字节开始发送。 例如当发送同步字0xaa55时,Pixy先发送0x55(第1个字节)再发送0xaa(第2个字节)。
对象的块格式
字节 16-位 字 描述
----------------------------------------------------------------
0, 1 是 同步字:0xaa55代表检测到的是普通对象(单色),0xaa56是颜色编码对象(多色)
2, 3 是 校验和:(第4~13字节所有16位字的和)
4, 5 是 颜色特征号)
6, 7 是 对象中心的x值
8, 9 是 对象中心的y值
10, 11 是 对象的宽度
12, 13 是 对象的高度
帧与帧之间通过插入一个额外的同步字(0xaa55)来标记。下面任一项表明检测到了新图像:
两个同步字背靠背发送(0xaa55,0xaa55)(即连续接收到两个0xaa55)
普通对象同步字(0xaa55)后跟颜色代码同步字(0xaa56)。
因此,解析串行流的典型方法是等待两个同步字后再开始解析对象块,使用同步字指示下一个对象块的开始,依此类推。
将控制数据发送到Pixy
将控制数据发送到Pixy来控制云台的移动、调整摄像机亮度及设置LED颜色。每个16位字都从小的字节(最先发送最小有效字节)发送。
控制云台舵机转动
字节 16-位 字 描述
----------------------------------------------------------------
0, 1 是 舵机0(水平方向)同步字
2, 3 是 舵机0(水平)的位置,值介于0~1000
4, 5 是 舵机1(垂直)的位置,值介于0~1000
摄像头亮度(曝光度)控制
字节 16-位 字 描述
----------------------------------------------------------------
0, 1 是 亮度同步字,值为0xfe00
2 否 亮度值
LED control LED控制
字节 16-位 字 描述
----------------------------------------------------------------
0, 1 是 LED灯同步字,值为0xfd00
2 否 红色值
3 否 绿色值
4 否 蓝色值
编写代码
先解析同步字以分离帧。 然后计算在1秒内获得的帧数,帧数应该是50。 下面是示例代码:
# PIXY_START_WORD 0xaa55# PIXY_START_WORD_CC 0xaa56# PIXY_START_WORDX 0x55aatypedef enum{NORMAL_BLOCK,CC_BLOCK // color code block} BlockType;static BlockType g_blockType; // use this to remember the next object block type between function callsint getStart(void){uint16_t w, lastw;lastw = 0xffff; // some inconsequential initial value 将lastw初始化为一个在检测中不可能出现的值while(1){w = getWord();if (w==0 && lastw==0)return 0; // in I2C and SPI modes this means no data, so return immediately 在I2C和SPI模式下如果第0和第1个字节的值都是0,表示未检测到对象else if (w==PIXY_START_WORD && lastw==PIXY_START_WORD){g_blockType = NORMAL_BLOCK; // remember block type 保存块类型return 1; // code found!检测到普通对象(单色)}else if (w==PIXY_START_WORD_CC && lastw==PIXY_START_WORD){g_blockType = CC_BLOCK; // found color code block检测到颜色编码对象(多色)return 1;}else if (w==PIXY_START_WORDX) // this is important, we might be juxtaposedgetByte(); // we're out of sync! (backwards) 未同步(回退)lastw = w; // save}}
The missing routine is getWord(), which is fairly straightforward:
上面的代码缺少的例程是getWord(),定义如下:
extern uint8_t getByte(void); // external, does the right things for your interfaceuint16_t getWord(void){// this routine assumes little endianuint16_t w;uint8_t c;c = getByte();w = getByte();w <<= 8;w |= c;return w;}
因此可以用下面的方法来验证每秒是否获得了50帧:
int main(){int i=0, curr, prev=0;// look for two start codes back to backwhile(1){curr = getStart());if (prev && curr) // two start codes means start of new frameprintf("%d", i++);prev = curr;}}
但是SPI有一个重要的例外,如果使用SPI接口,请阅读后面“最易混淆的SPI” “SPI tries its best to confuse things”
解析剩余的对象块比较简单,代码如下:
# PIXY_ARRAYSIZE 100typedef struct{uint16_t signature;uint16_t x;uint16_t y;uint16_t width;uint16_t height;uint16_t angle; // angle is only available for color coded blocks} Block;static int g_skipStart = 0;static Block *g_blocks;uint16_t getBlocks(uint16_t maxBlocks){uint8_t i;uint16_t w, blockCount, checksum, sum;Block *block;if (!g_skipStart){if (getStart()==0)return 0;}elseg_skipStart = 0;for(blockCount=0; blockCount<maxBlocks && blockCount<PIXY_ARRAYSIZE;){checksum = getWord();if (checksum==PIXY_START_WORD) // we've reached the beginning of the next frame 到达下一帧的开始位置{g_skipStart = 1;g_blockType = NORMAL_BLOCK;return blockCount;}else if (checksum==PIXY_START_WORD_CC){g_skipStart = 1;g_blockType = CC_BLOCK;return blockCount;}else if (checksum==0)return blockCount;block = g_blocks + blockCount;for (i=0, sum=0; i<sizeof(Block)/sizeof(uint16_t); i++){if (g_blockType==NORMAL_BLOCK && i>=5) // no angle for normal block{block->angle = 0;break;}w = getWord();sum += w;*((uint16_t *)block + i) = w;}// check checksumif (checksum==sum)blockCount++;elseprintf("checksum error!\n");w = getWord();if (w==PIXY_START_WORD)g_blockType = NORMAL_BLOCK;else if (w==PIXY_START_WORD_CC)g_blockType = CC_BLOCK;elsereturn blockCount;}}
上面这段代码假定同步字在被调用时已被读取。代码中唯一需要解释的可能是gskipStart变量。之所以设定这个变量是因为如果读取的是最后一个块,我们可能会读取同步字而不是校验和。 g_skipStart变量告诉我们是否已经读过同步字。
上面的代码复制了读入g_blocks数组的块,需要对这些块进行初始化:
void init(){g_blocks = (Block *)malloc(sizeof(Block)*PIXY_ARRAYSIZE);}
上面的代码处理了来自Pixy的对象数据,对Pixy的控制数据要如何发送?如控制云台舵机的移动、设置摄像机的亮度、设置LED颜色等:
# PIXY_SERVO_SYNC 0xff# PIXY_CAM_BRIGHTNESS_SYNC 0xfe# PIXY_LED_SYNC 0xfdextern int sendByte(uint8_t byte);int send(uint8_t *data, int len){int i;for (i=0; i<len; i++)sendByte(data[i]);[/i]return len;}int setServos(uint16_t s0, uint16_t s1){uint8_t outBuf[6];outBuf[0] = 0x00;outBuf[1] = PIXY_SERVO_SYNC;*(uint16_t *)(outBuf + 2) = s0;*(uint16_t *)(outBuf + 4) = s1;return send(outBuf, 6);}int setBrightness(uint8_t brightness){uint8_t outBuf[3];outBuf[0] = 0x00;outBuf[1] = PIXY_CAM_BRIGHTNESS_SYNC;outBuf[2] = brightness;return send(outBuf, 3);}int setLED(uint8_t r, uint8_t g, uint8_t b){uint8_t outBuf[5];outBuf[0] = 0x00;outBuf[1] = PIXY_LED_SYNC;outBuf[2] = r;outBuf[3] = g;outBuf[4] = b;return send(outBuf, 5);}
和getByte()一样,sendByte()例程是一个外部例程,为接口做正确的事情。
SPI tries its best to confuse things最易混淆的SPI
上面那些操作都挺合理的,除了Pixy上的SPI有让人郁闷的地方:
SPI is a simultaneous send/receive interface, so our getByte() routine instead of just returning a received data byte, needs to accept an output data byte too.
To save CPU, Pixy configures its SPI controller with 16-bit words instead of 8. This works great, but the 16-bit words are sent big-endian instead of little-endian.
Pixy relies on sync bytes sent to it to make sure it has good bit-sync, so you need to send a sync byte every other byte when talking to Pixy over SPI. This also solves the data imbalance problem with Pixy and SPI – that is, there's a lot more data being sent by Pixy than being received by Pixy. The sync bytes allow Pixy to separate the filler data from the valid data.
SPI是一个同步发送/接收接口,因此getByte()例程不仅仅返回接收到的数据字节,还需要接受输出的数据字节。
为了节省CPU,Pixy用16位字而不是8位来配置SPI控制器。但是16位字是以大端big-endian(最大的字节位)而不是小端little-endian方式被发送。
Pixy依赖于发送给它的同步字节以确保它具有良好的位同步,因此在通过SPI与Pixy通信时需要每隔一个字节发送一个同步字节。 这也解决了Pixy和SPI的数据不平衡问题 - 也就是说,Pixy发送的数据比Pixy接收的数据要多得多。 同步字节允许Pixy从有效数据中分割填充数据
So here's the code for SPI that takes these caveats into consideration:
下面是考虑了上述SPI情况的代码:
# PIXY_SYNC_BYTE 0x5a // to sync SPI data# PIXY_SYNC_BYTE_DATA 0x5b // to sync/indicate SPI send data# PIXY_OUTBUF_SIZE 64// SPI sends as it receives so we need a getByte routine that// takes an output data argumentextern uint8_t getByte(uint8_t out);// variables for a little circular queue for SPI output datastatic uint8_t g_outBuf[PIXY_OUTBUF_SIZE];static uint8_t g_outLen = 0;static uint8_t g_outWriteIndex = 0;static uint8_t g_outReadIndex = 0;uint16_t getWord(){// ordering is big endian because Pixy is sending 16 bits through SPIuint16_t w;uint8_t c, cout = 0;if (g_outLen){w = getByte(PIXY_SYNC_BYTE_DATA);cout = g_outBuf[g_outReadIndex++];g_outLen--;if (g_outReadIndex==PIXY_OUTBUF_SIZE)g_outReadIndex = 0;}elsew = getByte(PIXY_SYNC_BYTE); // send out sync bytew <<= 8;c = getByte(cout); // send out data bytew |= c;return w;}int send(uint8_t *data, int len){int i;// check to see if we have enough space in our circular queueif (g_outLen+len>PIXY_OUTBUF_SIZE)return -1;g_outLen += len;for (i=0; i<len; i++){g_outBuf[g_outWriteIndex++] = data;if (g_outWriteIndex==PIXY_OUTBUF_SIZE)g_outWriteIndex = 0;}return len;}
上面的代码我们为发送的数据实现了一个小的循环队列,这是因为接收和发送是绑定在一起。
以下是完整的代码,供参考:
###// Are you using an SPI interface? if so, uncomment this line# SPI# PIXY_ARRAYSIZE 100# PIXY_START_WORD 0xaa55# PIXY_START_WORD_CC 0xaa56# PIXY_START_WORDX 0x55aa# PIXY_SERVO_SYNC 0xff# PIXY_CAM_BRIGHTNESS_SYNC 0xfe# PIXY_LED_SYNC 0xfd# PIXY_OUTBUF_SIZE 64# PIXY_SYNC_BYTE 0x5a# PIXY_SYNC_BYTE_DATA 0x5b// the routinesvoid init();int getStart(void);uint16_t getBlocks(uint16_t maxBlocks);int setServos(uint16_t s0, uint16_t s1);int setBrightness(uint8_t brightness);int setLED(uint8_t r, uint8_t g, uint8_t b);// data typestypedef enum{NORMAL_BLOCK,CC_BLOCK // color code block} BlockType;typedef struct{uint16_t signature;uint16_t x;uint16_t y;uint16_t width;uint16_t height;uint16_t angle; // angle is only available for color coded blocks} Block;// communication routinesstatic uint16_t getWord(void);static int send(uint8_t *data, int len);# SPI //////////// for I2C and UARTextern uint8_t getByte(void);extern int sendByte(uint8_t byte);uint16_t getWord(void){// this routine assumes little endianuint16_t w;uint8_t c;c = getByte();w = getByte();w <<= 8;w |= c;return w;}int send(uint8_t *data, int len){int i;for (i=0; i<len; i++)sendByte(data);return len;}# ///////////// SPI routines// SPI sends as it receives so we need a getByte routine that// takes an output data argumentextern uint8_t getByte(uint8_t out);// variables for a little circular queuestatic uint8_t g_outBuf[PIXY_OUTBUF_SIZE];static uint8_t g_outLen = 0;static uint8_t g_outWriteIndex = 0;static uint8_t g_outReadIndex = 0;uint16_t getWord(){// ordering is big endian because Pixy is sending 16 bits through SPIuint16_t w;uint8_t c, cout = 0;if (g_outLen){w = getByte(PIXY_SYNC_BYTE_DATA);cout = g_outBuf[g_outReadIndex++];g_outLen--;if (g_outReadIndex==PIXY_OUTBUF_SIZE)g_outReadIndex = 0;}elsew = getByte(PIXY_SYNC_BYTE); // send out sync bytew <<= 8;c = getByte(cout); // send out data bytew |= c;return w;}int send(uint8_t *data, int len){int i;// check to see if we have enough space in our circular queueif (g_outLen+len>PIXY_OUTBUF_SIZE)return -1;g_outLen += len;for (i=0; i<len; i++){g_outBuf[g_outWriteIndex++] = data;if (g_outWriteIndex==PIXY_OUTBUF_SIZE)g_outWriteIndex = 0;}return len;}# //////////////// end SPI routinesstatic int g_skipStart = 0;static BlockType g_blockType;static Block *g_blocks;void init(){g_blocks = (Block *)malloc(sizeof(Block)*PIXY_ARRAYSIZE);}int getStart(void){uint16_t w, lastw;lastw = 0xffff;while(1){w = getWord();if (w==0 && lastw==0)return 0; // no start codeelse if (w==PIXY_START_WORD && lastw==PIXY_START_WORD){g_blockType = NORMAL_BLOCK;return 1; // code found!}else if (w==PIXY_START_WORD_CC && lastw==PIXY_START_WORD){g_blockType = CC_BLOCK; // found color code blockreturn 1;}else if (w==PIXY_START_WORDX)#ifdef SPIgetByte(0); // we're out of sync! (backwards)#getByte(); // we're out of sync! (backwards)#lastw = w;}}uint16_t getBlocks(uint16_t maxBlocks){uint8_t i;uint16_t w, blockCount, checksum, sum;Block *block;if (!g_skipStart){if (getStart()==0)return 0;}elseg_skipStart = 0;for(blockCount=0; blockCount<maxBlocks && blockCount<PIXY_ARRAYSIZE;){checksum = getWord();if (checksum==PIXY_START_WORD) // we've reached the beginning of the next frame{g_skipStart = 1;g_blockType = NORMAL_BLOCK;return blockCount;}else if (checksum==PIXY_START_WORD_CC){g_skipStart = 1;g_blockType = CC_BLOCK;return blockCount;}else if (checksum==0)return blockCount;block = g_blocks + blockCount;for (i=0, sum=0; i<sizeof(Block)/sizeof(uint16_t); i++){if (g_blockType==NORMAL_BLOCK && i>=5) // no angle for normal block{block->angle = 0;break;}w = getWord();sum += w;*((uint16_t *)block + i) = w;}// check checksumif (checksum==sum)blockCount++;elseprintf("checksum error!\n");w = getWord();if (w==PIXY_START_WORD)g_blockType = NORMAL_BLOCK;else if (w==PIXY_START_WORD_CC)g_blockType = CC_BLOCK;elsereturn blockCount;}}int setServos(uint16_t s0, uint16_t s1){uint8_t outBuf[6];outBuf[0] = 0x00;outBuf[1] = PIXY_SERVO_SYNC;*(uint16_t *)(outBuf + 2) = s0;*(uint16_t *)(outBuf + 4) = s1;return send(outBuf, 6);}int setBrightness(uint8_t brightness){uint8_t outBuf[3];outBuf[0] = 0x00;outBuf[1] = PIXY_CAM_BRIGHTNESS_SYNC;outBuf[2] = brightness;return send(outBuf, 3);}int setLED(uint8_t r, uint8_t g, uint8_t b){uint8_t outBuf[5];outBuf[0] = 0x00;outBuf[1] = PIXY_LED_SYNC;outBuf[2] = r;outBuf[3] = g;outBuf[4] = b;return send(outBuf, 5);}
——推荐活动——
报名链接:
http://mc.dfrobot.com.cn/thread-280766-1-1.html

*欢迎转发朋友圈。如需转载,请注明出处和原作者。
项目干货戳这里
MIDI控制自动弹钢琴 | mini热带温室 | 无线蓝牙机械键盘
吃币机器人 | 骨骼追踪抛物预判垃圾桶 | 弹球机

美的作品,值得拥有一个 “在看”
