
你的无限手套还缺一点,就能打响指
*项目作者:KIKIYA
www.dfrobot.com.cn

请大家记住这美丽的图片,大概是在11月份的时候小编看见了这张照片,并被它的美色毫不留情的深深吸引了。冲动了,下定决心要自己做一个,胆子肥果然也是小编的一大优点呀。后面发生的事情完全的出乎了我的意料。这里插播一个铁打的事实,小编大学的专员是管理学,高中是个艺术生。这种高科技的东西和我一直处于一种无缘的状态。我当时觉得原作者把自己的制作过程介绍的很详细,代码也开源了,一定超简单的。
当时的我天真的以为它的最终形态就是这样了,在仔细的看了教程以后。我发现并不是这样的,我简直给自己挖了个天坑。以下是它的动态视频:
自己挖的坑还是要自己填,不过我可以拉一个和我一起铲土的啊。在这里大力感谢窄哥的大力相助。
第一步:概述
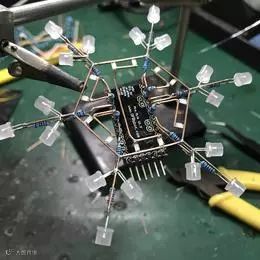
这是一个纯手工焊接,由30个LED灯组成,分为20多个独立的部分,通过触碰来调节LED的动画效果。




看完这个就会知道我遇到的第一个BUG是啥···我灯买错了····
第二步:材料清单
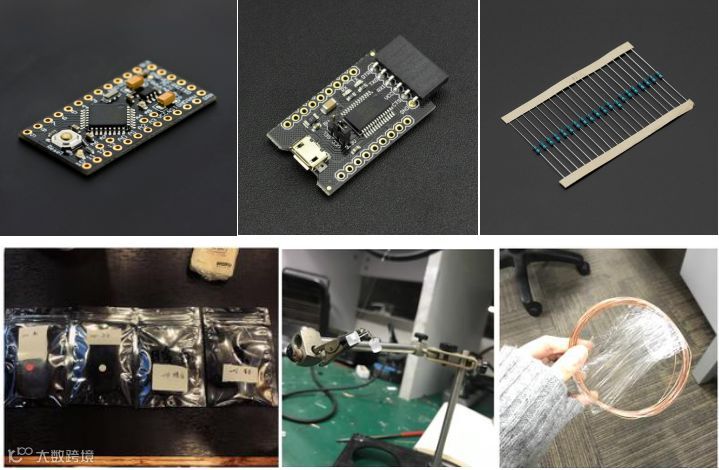
DFduino Pro Mini V1.3(16M5V328)
其实愿制作者用的是Arduino nano,我们一开始也是准备的nano,但是由于我们DFRobot太为我们的客户着想了,帮客户把nano上的引脚全部都焊接好了。具体中级发生了什么,请移步看制作过程。
FTBI Basic下载器(Arduino兼容)
用来给Mini拷程序。
直插电阻(准备的数量要比以下给出的数量多一些,可用相近的电阻代替)
220欧电阻*34pcs
5.1M欧电阻*4pcs
860欧电阻*2pcs
SMD LED 1206 0R 1210 白色*25
我这里用了紫色,事实上我买了四种颜色
LED pack*36pcs(FIT0372*4)
就是我买错了的黄灯,在某宝上搜索高亮LED发光管,5MM雾面白光,LED灯珠二极管,F5平头雾状白灯,就可以买到,效果是一样的。
0.8mm铜丝*4m
工具
钳子 烙铁 焊料 量尺 铅笔 白纸 胶布
耐心
这是最重要的一点!
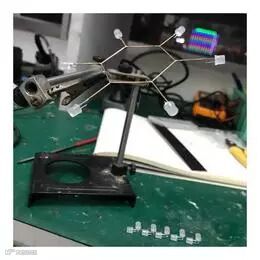
第三步:构建

首先选择一个雪花的样式。我选择一个漂亮而简单的雪花水晶把它的形状大致画到纸上,并调整到适合Arduino Nano的尺寸的大小形状。
支撑结构也用作布线,由0.8mm黄铜棒与锡焊接而成。我总共使用了2米的铜丝。这是对你的耐心和技巧的考验。焊接占据了大部分的时间。
首先,通过弯曲一根铜丝并将两端焊接在一起来制造一个正六边形。通过在六边形的顶部添加另外6个相同长度的铜丝,现在需要将LED的所有阴极引线焊接到铜丝上。棘手的部分是添加SMD LED,双面胶带在这里给我们带来了曙光。
一开始的时候其实我们按照原先的教程找到了一块Arduino nano,我们用了大概几个小时的时间用焊枪把上面的引脚小心翼翼的拔了下来。

它长这样!

然后它变成了这样
但是我们还是放弃了它,因为板子在焊枪的高温下好几个引脚都已经失去了它的意义。
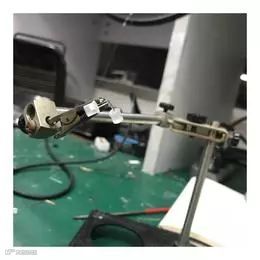
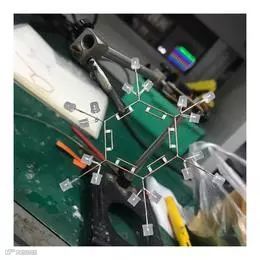
接下来,是时候在核心结构下添加控制器,在它们之间留出足够的空间以适合3层黄铜棒接线,这将连接微控制器引脚到所有LED阳极引线。这需要极大的耐心。您不仅需要避免电线之间的短路,还要添加限流电阻并使其看起来不错。在制作过程中,每焊接一个led和电阻都要检查一下电路,因为焊枪很容易把led和电阻弄坏。
叶片LED分别连接到最近的Arduino输出引脚。分支LED按两个分组并连接到PWM引脚。
下面是我的制作过程:












最后的最后:原理图
别人的原理图:

我的原理图(稍微自由发挥了一下下):

*欢迎转发朋友圈。如需转载,请注明出处和原作者。
项目干货戳这里
MIDI控制自动弹钢琴 | mini热带温室 | 无线蓝牙机械键盘
吃币机器人 | 骨骼追踪抛物预判垃圾桶 | 弹球机

点击“阅读原文”,至文末下载代码。
