
【点击上方「蓝字」关注我们,一起成为技术颜控!】


正文共:1756字 16图
预计阅读时间:5分钟
MAKER: Morrisl4 / 译:Roy

上一期给大家介绍了美国大学生做的测水质水上无人船,不少朋友后台回复好厉害,但是稍微有一点复杂,这期给大家介绍一个适合初学者的只结合3D打印和Arduino知识的项目。
不多说,先看下效果!

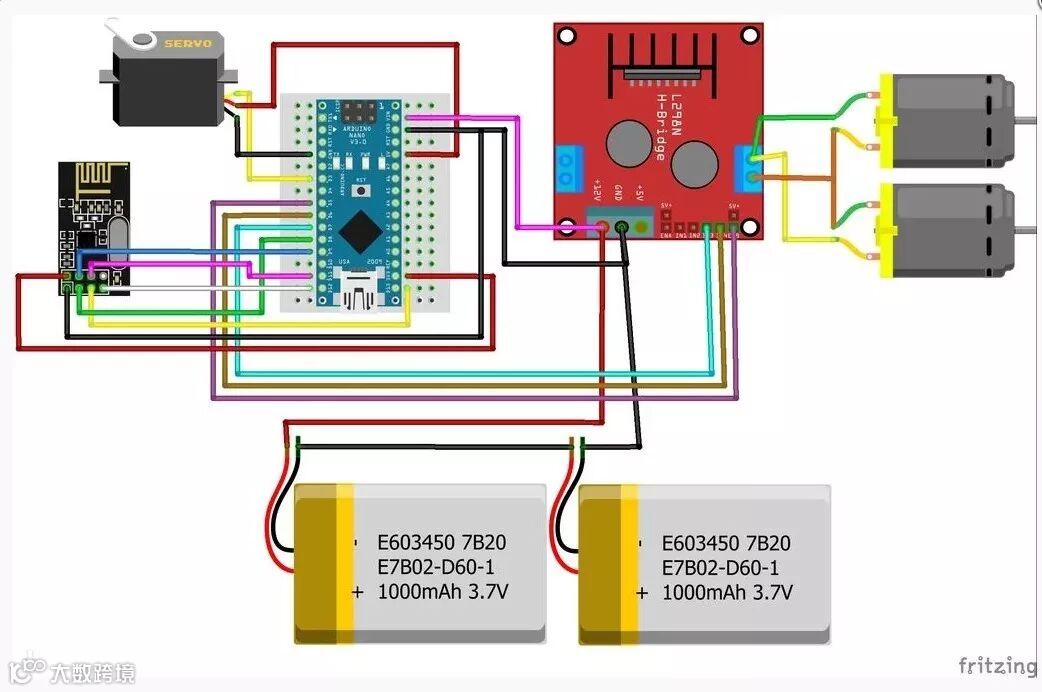
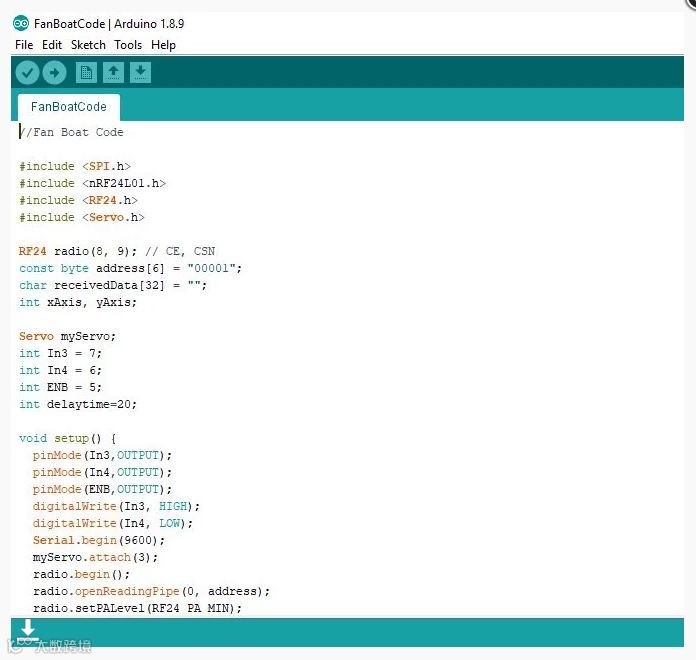
Arduino Nano x1
迷你面包板 x1
L298N电机驱动器 x1
直流电机 x2
SG90伺服电机 x1
NRF24L01模块无线收发器 x1
LiPo电池(锂电池) x2
很多跳线
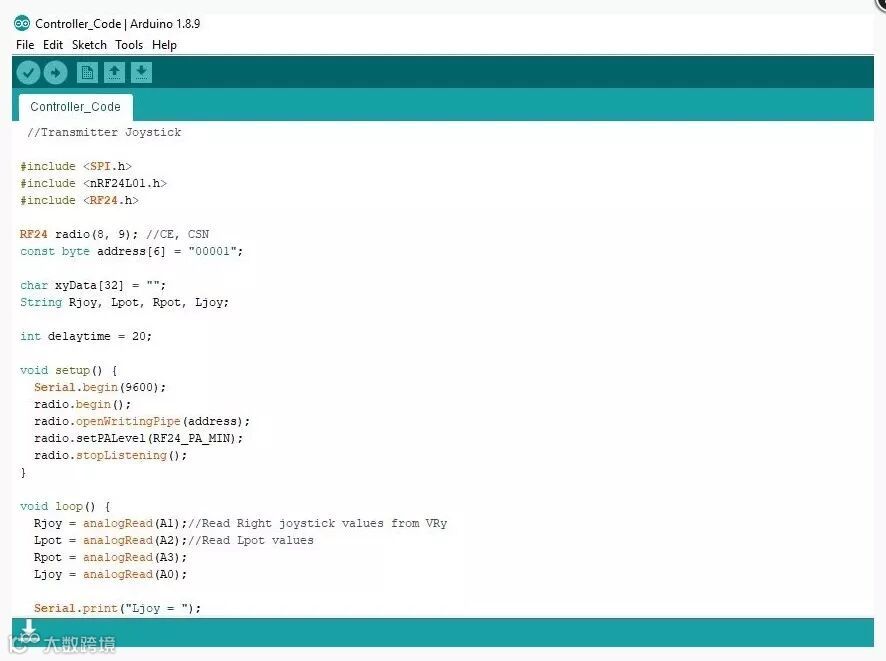
Arduino Nano x1
迷你面包板 x1
适用于Arduino的操纵杆模块 x2
带天线的NRF24L01无线收发器模块 x1
旋转电位器 x2
拨动开关 x1
6V AA(5号)电池座 x1
1.5V AA(5号)电池 x4
长6mm的M3螺钉
很多跳线再次出现
控制器底座 x1
控制器前盖 x1
船体 x1
桅杆 x1
尾翼 x1
螺旋桨毂 x2
带n4415的螺旋桨(顺时针)x3
带n4415的螺旋桨(逆时针)x3





根据上面提供的图片,对大家来说,应该可以比较轻松得组好控制器。
要考虑的一件事是如何走线。一旦有电池组,操纵杆和nano等,就必须以一种可以将控制器盖放在控制器外壳上的方式来规划走线。电线的张力可能会推向盖子,让盖子难以关上。可以使用一些胶带来解决。
组装小船有两个部分。
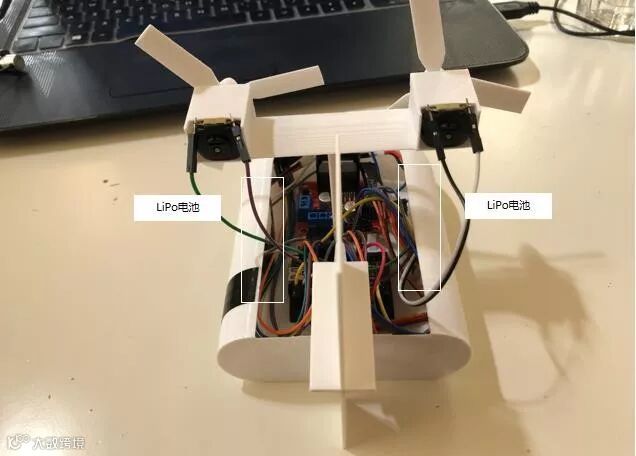
第一部分是3D打印部件的组装。螺旋桨叶片紧紧地卡在螺旋桨桨毂上。此外,桅杆够通过过盈接触安装在船体上。之后,组装3D打印部件。
第二部分是组装电子元件。将两个LiPo(锂)电池粘贴在船体内侧。将伺服电机安装到船体上。接下来,将Arduino nano和电机驱动器放入船体。然后,将NRF24L01模块放置在船体的前部。将两个直流电机放入桅杆并将螺旋桨放在电机轴上。最后确保所有电线都塞进船体。请记住,在组装电子设备时,把电路断开。

最终实物效果图
到了这一步,小船可以下水了!体验畅游的感觉吧!
今年的上海创客嘉年华,你知道是几号开始吗?
(上期留言获奖的两位小伙伴,徽章已寄出,收到后记得后台回复我们一下~)

你可能还想看

点一点
一起去上海创客嘉年华
👇