

前不久,@云天在 DF创客社区论坛发了一个“能听会说的小车”雏形,但只用了行空板K10的四个引脚。
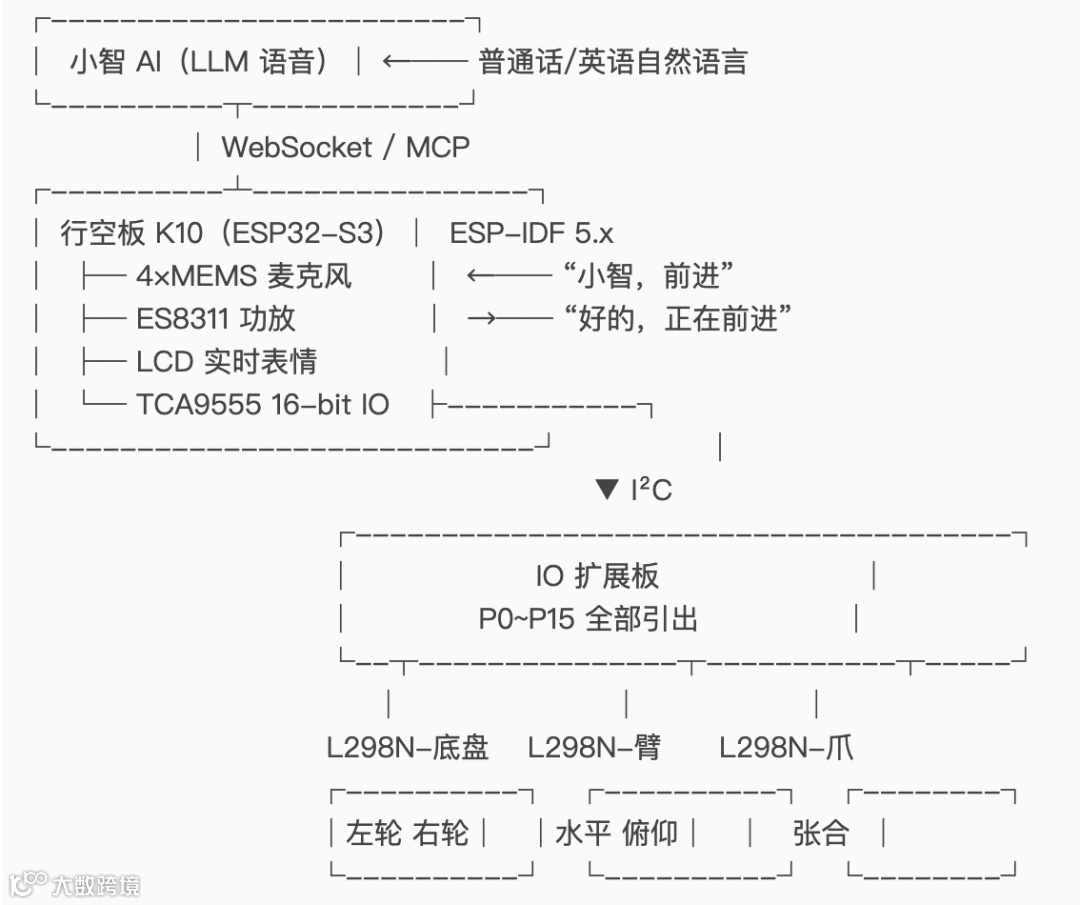
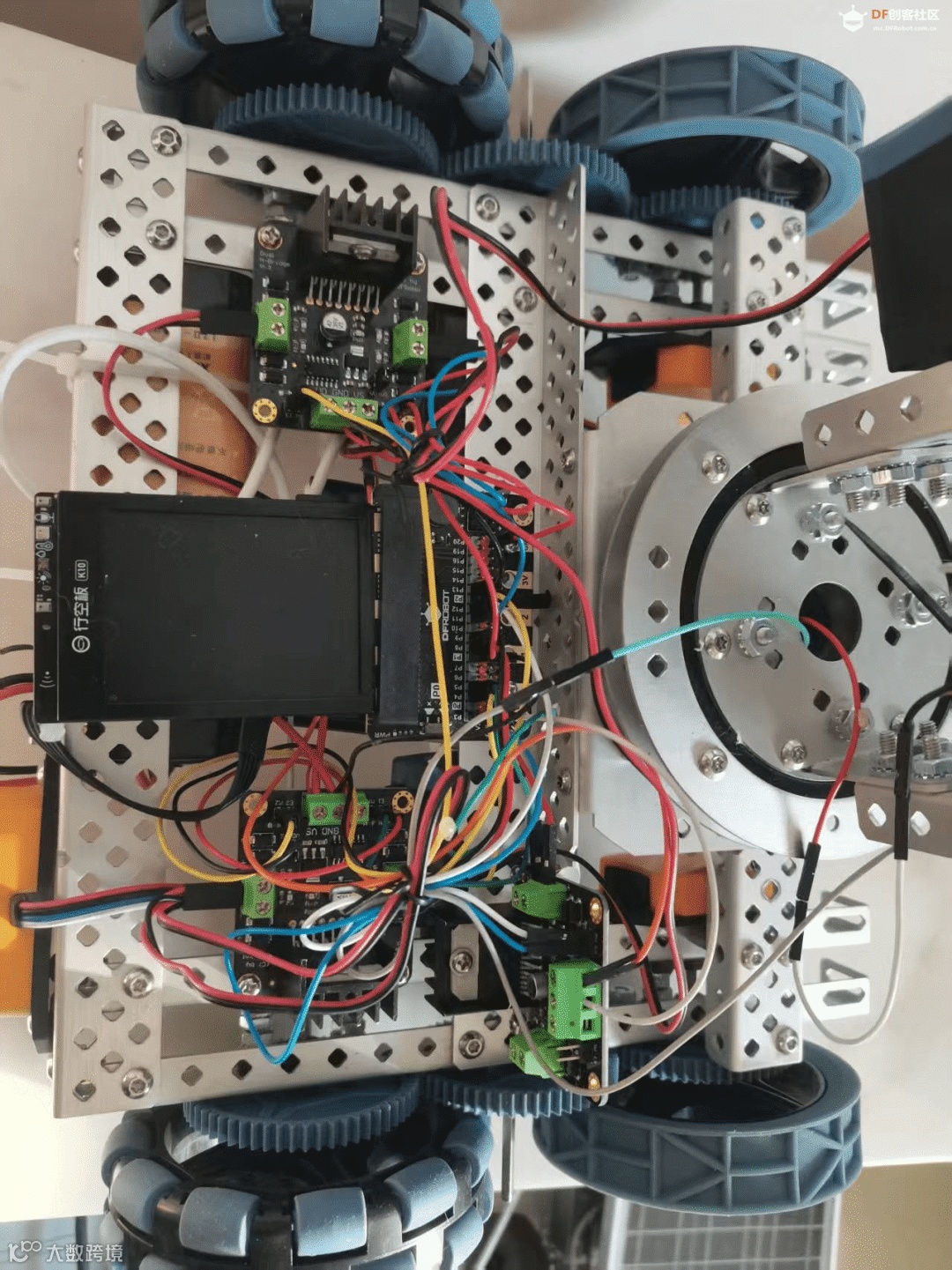
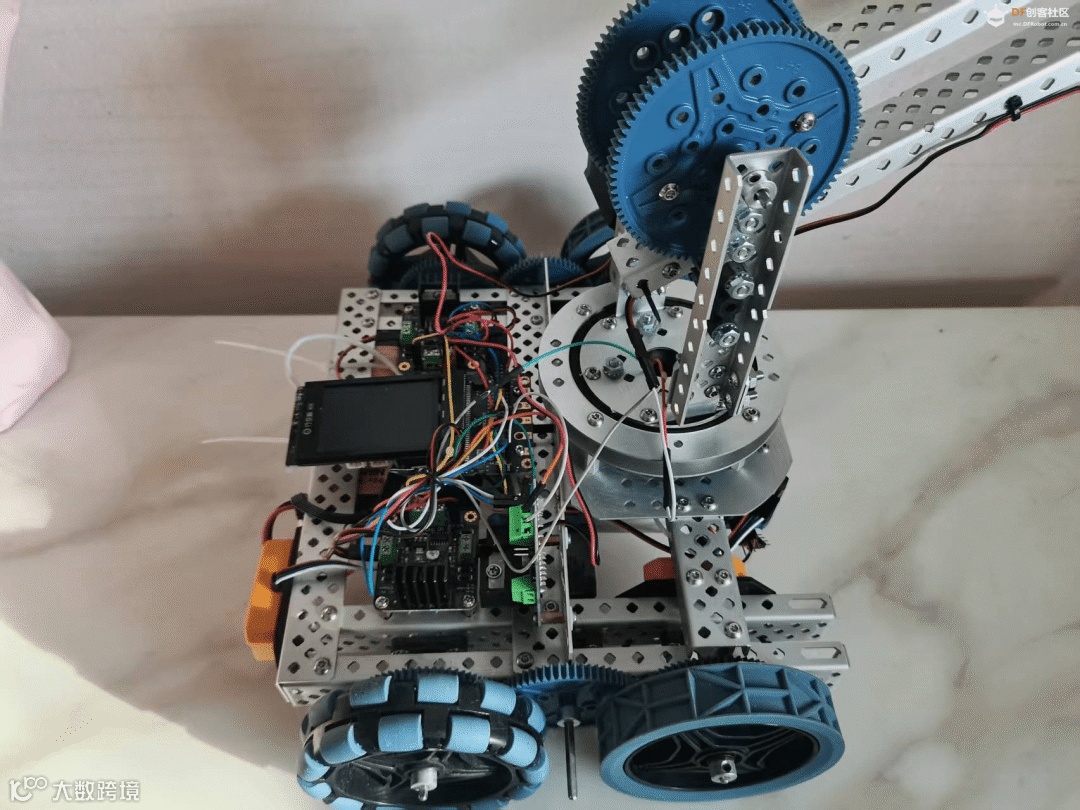
这次云天老师把金手指引出的“引脚”通过IO扩展板接入 3个L298N(DF-MD V1.3)电机驱动器,控制小车真正做到了“说一句,动一路”——前进、后退、左转、右转、机械臂 360° 旋转、抬起放下、机械爪张合,全部一条语音指令搞定。

整体架构


演示视频
视频来源:B站 @创客云天
电机接线对照表(TCA9555 → L298N)
|
|
|
|
|
|
|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
软件关键片段
1. IO 扩展板一次初始化
uint16_t output_pins = (1 << 8) | (1 << 9) | (1 << 12) | (1 << 13) | (1 << 14) | (1 << 3) | (1 << 4) | (1 << 2) | (1 << 7);
esp_io_expander_set_dir(io_expander, output_pins, IO_EXPANDER_OUTPUT);
esp_io_expander_set_level(io_expander, output_pins, 0); // 全部归零,防止上电乱动
2. MCP “一句话注册”
mcp_server.AddTool("self.car.action",
"可控制小车及车载机械臂、机械爪的运行动作,小车的动作是前进、后退、停止、左转、右转。机械臂的动作是左旋转、右旋转、抬起、放下。机械爪的动作是张开、闭合",
PropertyList({Property("动作", kPropertyTypeString)}),
[this, gpio_num_P1](const PropertyList& properties) -> ReturnValue {
std::string action = properties["动作"].value<std::string>().c_str();
if (action == "前进") {
SetPnumLevel(8, 1);
SetPnumLevel(9, 1);
SetPnumLevel(12, 1);
SetPnumLevel(13, 1);
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "停止") {
SetPnumLevel(8, 0); // P8引脚
SetPnumLevel(9, 0); // P9引脚
} elseif (action == "后退") {
SetPnumLevel(8, 1); // P8引脚
SetPnumLevel(9, 1); // P9引脚
SetPnumLevel(12, 0); // P5引脚
SetPnumLevel(13, 0); // P4引脚
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "左转") {
SetPnumLevel(8, 1);
SetPnumLevel(9, 1);
SetPnumLevel(12, 0);
SetPnumLevel(13, 1);
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "右转") {
SetPnumLevel(8, 1);
SetPnumLevel(9, 1);
SetPnumLevel(12, 1);
SetPnumLevel(13, 0);
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "左旋转") {
// 机械臂水平动作
SetPnumLevel(7, 1); // P2引脚 E
SetPnumLevel(4, 0); // P13引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "右旋转") {
// 机械臂水平动作
SetPnumLevel(7, 1); // P2引脚 E
SetPnumLevel(4, 1); // P13引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "张开") {
// 机械爪动作
SetPnumLevel(14, 1); // P3引脚 E
SetPnumLevel(3, 0); // P12引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "闭合") {
// 机械爪动作
SetPnumLevel(14, 1); // P3引脚 E
SetPnumLevel(3, 1); // P12引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "抬起") {
// 机械臂垂直运动
SetPnumLevel(2, 1); // P11引脚 E
gpio_set_level(gpio_num_P1, 0); // M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "放下") {
// 机械臂垂直运动
SetPnumLevel(2, 1); // P11引脚 E
gpio_set_level(gpio_num_P1, 1); // M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(0.8 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
}
return ReturnValue(action);
}
);
把 12 条动作全部写进一个 Lambda,LLM 只需一次函数调用即可精准执行。
3. 停车回调函数
static void StopMotorCallbackStatic(TimerHandle_t xTimer) {
auto* self = static_cast<Df_K10Board*>(pvTimerGetTimerID(xTimer));
self->StopMotorCallback();
}
void StopMotorCallback() {
SetPnumLevel(8, 0);
SetPnumLevel(9, 0);
SetPnumLevel(12, 0);
SetPnumLevel(13, 0);
SetPnumLevel(14, 0);
SetPnumLevel(3, 0);
SetPnumLevel(2, 0);
SetPnumLevel(7, 0);
SetPnumLevel(4, 0);
}
每条动作都会根据实际行程重置定时器(爪 1.6 s、臂 0.8~1 s、底盘 1 s),兼顾“到位”与“安全”。
一句话总结
“当语音助手不再只是‘聊天’,而是能直接操作 5 路电机、11 种动作、100% 开源可二次开发,你会发现——给 ESP32 装上‘大模型’,才是嵌入式玩家的新浪漫。”
完整代码
"XIAOZHI-ESP32-MAIN/main/boards/df-k10/df_k10_board.cc"
#include "wifi_board.h"
#include "k10_audio_codec.h"
#include "display/lcd_display.h"
#include "esp_lcd_ili9341.h"
#include "led_control.h"
#include "application.h"
#include "button.h"
#include "config.h"
#include "esp32_camera.h"
#include "led/circular_strip.h"
#include "assets/lang_config.h"
#include <esp_log.h>
#include <esp_lcd_panel_vendor.h>
#include <driver/i2c_master.h>
#include <driver/spi_common.h>
#include <wifi_station.h>
#include <freertos/timers.h>
#include "esp_io_expander_tca95xx_16bit.h"
#include <mcp_server.h>
#define TAG "DF-K10"
LV_FONT_DECLARE(font_puhui_20_4);
LV_FONT_DECLARE(font_awesome_20_4);
class Df_K10Board :public WifiBoard {
private:
i2c_master_bus_handle_t i2c_bus_;
esp_io_expander_handle_t io_expander;
LcdDisplay *display_;
button_handle_t btn_a;
button_handle_t btn_b;
Esp32Camera* camera_;
button_driver_t* btn_a_driver_ = nullptr;
button_driver_t* btn_b_driver_ = nullptr;
CircularStrip* led_strip_;
TimerHandle_t stop_timer_ = nullptr;
static Df_K10Board* instance_;
void InitializeI2c() {
// Initialize I2C peripheral
i2c_master_bus_config_t i2c_bus_cfg = {
.i2c_port = (i2c_port_t)1,
.sda_io_num = AUDIO_CODEC_I2C_SDA_PIN,
.scl_io_num = AUDIO_CODEC_I2C_SCL_PIN,
.clk_source = I2C_CLK_SRC_DEFAULT,
.glitch_ignore_cnt = 7,
.intr_priority = 0,
.trans_queue_depth = 0,
.flags = {
.enable_internal_pullup = 1,
},
};
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_bus_cfg, &i2c_bus_));
}
void InitializeSpi() {
spi_bus_config_t buscfg = {};
buscfg.mosi_io_num = GPIO_NUM_21;
buscfg.miso_io_num = GPIO_NUM_NC;
buscfg.sclk_io_num = GPIO_NUM_12;
buscfg.quadwp_io_num = GPIO_NUM_NC;
buscfg.quadhd_io_num = GPIO_NUM_NC;
buscfg.max_transfer_sz = DISPLAY_WIDTH * DISPLAY_HEIGHT * sizeof(uint16_t);
ESP_ERROR_CHECK(spi_bus_initialize(SPI3_HOST, &buscfg, SPI_DMA_CH_AUTO));
}
esp_err_t IoExpanderSetLevel(uint16_t pin_mask, uint8_t level) {
return esp_io_expander_set_level(io_expander, pin_mask, level);
}
uint8_t IoExpanderGetLevel(uint16_t pin_mask) {
uint32_t pin_val = 0;
esp_io_expander_get_level(io_expander, DRV_IO_EXP_INPUT_MASK, &pin_val);
pin_mask &= DRV_IO_EXP_INPUT_MASK;
return (uint8_t)((pin_val & pin_mask) ? 1 : 0);
}
void InitializeIoExpander() {
esp_io_expander_new_i2c_tca95xx_16bit(
i2c_bus_, ESP_IO_EXPANDER_I2C_TCA9555_ADDRESS_000, &io_expander);
esp_err_t ret;
ret = esp_io_expander_print_state(io_expander);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Print state failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_dir(io_expander, IO_EXPANDER_PIN_NUM_0, IO_EXPANDER_OUTPUT);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_level(io_expander, 0, 1);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set level failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_dir(
io_expander, DRV_IO_EXP_INPUT_MASK,
IO_EXPANDER_INPUT);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
}
// 设置多个引脚为输出模式
uint16_t output_pins = (1 << 8) | (1 << 9) | (1 << 12) | (1 << 13) | (1 << 14) | (1 << 3) | (1 << 4) | (1 << 2) | (1 << 7); // 引脚 P8,P9,P5,P4,P3,P12,P13,P11,P2
ret = esp_io_expander_set_dir(io_expander, output_pins, IO_EXPANDER_OUTPUT);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_level(io_expander, output_pins, 0);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set level failed: %s", esp_err_to_name(ret));
}
}
void SetPnumLevel(uint16_t Pnum, uint8_t level) {
esp_err_t ret = esp_io_expander_set_level(io_expander, 1 << Pnum, level);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set level for P failed: %s", esp_err_to_name(ret));
}
}
void InitializeButtons() {
instance_ = this;
// Button A
button_config_t btn_a_config = {
.long_press_time = 1000,
.short_press_time = 0
};
btn_a_driver_ = (button_driver_t*)calloc(1, sizeof(button_driver_t));
btn_a_driver_->enable_power_save = false;
btn_a_driver_->get_key_level = [](button_driver_t *button_driver) -> uint8_t {
return !instance_->IoExpanderGetLevel(IO_EXPANDER_PIN_NUM_2);
};
ESP_ERROR_CHECK(iot_button_create(&btn_a_config, btn_a_driver_, &btn_a));
iot_button_register_cb(btn_a, BUTTON_SINGLE_CLICK, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto& app = Application::GetInstance();
if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
self->ResetWifiConfiguration();
}
app.ToggleChatState();
}, this);
iot_button_register_cb(btn_a, BUTTON_LONG_PRESS_START, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto codec = self->GetAudioCodec();
auto volume = codec->output_volume() - 10;
if (volume < 0) {
volume = 0;
}
codec->SetOutputVolume(volume);
self->GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
}, this);
// Button B
button_config_t btn_b_config = {
.long_press_time = 1000,
.short_press_time = 0
};
btn_b_driver_ = (button_driver_t*)calloc(1, sizeof(button_driver_t));
btn_b_driver_->enable_power_save = false;
btn_b_driver_->get_key_level = [](button_driver_t *button_driver) -> uint8_t {
return !instance_->IoExpanderGetLevel(IO_EXPANDER_PIN_NUM_12);
};
ESP_ERROR_CHECK(iot_button_create(&btn_b_config, btn_b_driver_, &btn_b));
iot_button_register_cb(btn_b, BUTTON_SINGLE_CLICK, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto& app = Application::GetInstance();
if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
self->ResetWifiConfiguration();
}
app.ToggleChatState();
}, this);
iot_button_register_cb(btn_b, BUTTON_LONG_PRESS_START, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto codec = self->GetAudioCodec();
auto volume = codec->output_volume() + 10;
if (volume > 100) {
volume = 100;
}
codec->SetOutputVolume(volume);
self->GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
}, this);
}
void InitializeCamera() {
camera_config_t config = {};
config.ledc_channel = LEDC_CHANNEL_2; // LEDC通道选择 用于生成XCLK时钟 但是S3不用
config.ledc_timer = LEDC_TIMER_2; // LEDC timer选择 用于生成XCLK时钟 但是S3不用
config.pin_d0 = CAMERA_PIN_D2;
config.pin_d1 = CAMERA_PIN_D3;
config.pin_d2 = CAMERA_PIN_D4;
config.pin_d3 = CAMERA_PIN_D5;
config.pin_d4 = CAMERA_PIN_D6;
config.pin_d5 = CAMERA_PIN_D7;
config.pin_d6 = CAMERA_PIN_D8;
config.pin_d7 = CAMERA_PIN_D9;
config.pin_xclk = CAMERA_PIN_XCLK;
config.pin_pclk = CAMERA_PIN_PCLK;
config.pin_vsync = CAMERA_PIN_VSYNC;
config.pin_href = CAMERA_PIN_HREF;
config.pin_sccb_sda = -1; // 这里如果写-1 表示使用已经初始化的I2C接口
config.pin_sccb_scl = CAMERA_PIN_SIOC;
config.sccb_i2c_port = 1; // 这里如果写1 默认使用I2C1
config.pin_pwdn = CAMERA_PIN_PWDN;
config.pin_reset = CAMERA_PIN_RESET;
config.xclk_freq_hz = XCLK_FREQ_HZ;
config.pixel_format = PIXFORMAT_RGB565;
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 12;
config.fb_count = 1;
config.fb_location = CAMERA_FB_IN_PSRAM;
config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
camera_ = new Esp32Camera(config);
}
void InitializeIli9341Display() {
esp_lcd_panel_io_handle_t panel_io = nullptr;
esp_lcd_panel_handle_t panel = nullptr;
// 液晶屏控制IO初始化
ESP_LOGD(TAG, "Install panel IO");
esp_lcd_panel_io_spi_config_t io_config = {};
io_config.cs_gpio_num = GPIO_NUM_14;
io_config.dc_gpio_num = GPIO_NUM_13;
io_config.spi_mode = 0;
io_config.pclk_hz = 40 * 1000 * 1000;
io_config.trans_queue_depth = 10;
io_config.lcd_cmd_bits = 8;
io_config.lcd_param_bits = 8;
ESP_ERROR_CHECK(esp_lcd_new_panel_io_spi(SPI3_HOST, &io_config, &panel_io));
// 初始化液晶屏驱动芯片
ESP_LOGD(TAG, "Install LCD driver");
esp_lcd_panel_dev_config_t panel_config = {};
panel_config.reset_gpio_num = GPIO_NUM_NC;
panel_config.bits_per_pixel = 16;
panel_config.color_space = ESP_LCD_COLOR_SPACE_BGR;
ESP_ERROR_CHECK(esp_lcd_new_panel_ili9341(panel_io, &panel_config, &panel));
ESP_ERROR_CHECK(esp_lcd_panel_reset(panel));
ESP_ERROR_CHECK(esp_lcd_panel_init(panel));
ESP_ERROR_CHECK(esp_lcd_panel_invert_color(panel, DISPLAY_BACKLIGHT_OUTPUT_INVERT));
ESP_ERROR_CHECK(esp_lcd_panel_swap_xy(panel, DISPLAY_SWAP_XY));
ESP_ERROR_CHECK(esp_lcd_panel_mirror(panel, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y));
ESP_ERROR_CHECK(esp_lcd_panel_disp_on_off(panel, true));
display_ = new SpiLcdDisplay(panel_io, panel,
DISPLAY_WIDTH, DISPLAY_HEIGHT, DISPLAY_OFFSET_X, DISPLAY_OFFSET_Y, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y, DISPLAY_SWAP_XY,
{
.text_font = &font_puhui_20_4,
.icon_font = &font_awesome_20_4,
.emoji_font = font_emoji_64_init(),
});
}
// 物联网初始化,添加对 AI 可见设备
void InitializeIot() {
gpio_num_t gpio_num_P0 = GPIO_NUM_1;
gpio_num_t gpio_num_P1 = GPIO_NUM_2;
gpio_config_t cfg = {
.pin_bit_mask = (1ULL << gpio_num_P0) | (1ULL << gpio_num_P1),
.mode = GPIO_MODE_OUTPUT,
.pull_up_en = GPIO_PULLUP_DISABLE,
.pull_down_en = GPIO_PULLDOWN_DISABLE,
.intr_type = GPIO_INTR_DISABLE,
};
ESP_ERROR_CHECK(gpio_config(&cfg));
gpio_set_level(gpio_num_P0, 0);
gpio_set_level(gpio_num_P1, 0);
stop_timer_ = xTimerCreate("StopMotorTimer", pdMS_TO_TICKS(1000), pdFALSE, this, StopMotorCallbackStatic);
auto& mcp_server = McpServer::GetInstance();
mcp_server.AddTool("self.car.action",
"可控制小车及车载机械臂、机械爪的运行动作,小车的动作是前进、后退、停止、左转、右转。机械臂的动作是左旋转、右旋转、抬起、放下。机械爪的动作是张开、闭合",
PropertyList({Property("动作", kPropertyTypeString)}),
[this, gpio_num_P1](const PropertyList& properties) -> ReturnValue {
std::string action = properties["动作"].value<std::string>().c_str();
if (action == "前进") {
SetPnumLevel(8, 1);
SetPnumLevel(9, 1);
SetPnumLevel(12, 1);
SetPnumLevel(13, 1);
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "停止") {
SetPnumLevel(8, 0); // P8引脚
SetPnumLevel(9, 0); // P9引脚
} elseif (action == "后退") {
SetPnumLevel(8, 1); // P8引脚
SetPnumLevel(9, 1); // P9引脚
SetPnumLevel(12, 0); // P5引脚
SetPnumLevel(13, 0); // P4引脚
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
// 夹子
// SetPnumLevel(14,0); //P3引脚 E
// SetPnumLevel(3,0); //P12引脚 M
// 上下
// SetPnumLevel(2,0); //P11引脚 E
// 水平
// SetPnumLevel(7,0); //P2引脚 E
// SetPnumLevel(4,0); //P13引脚 M
// SetPnumLevel(15,0); //LED灯
// SetPnumLevel(16,0); //无对应引脚
// SetPnumLevel(1,0); //无对应引脚
// SetPnumLevel(5,0); //无对应引脚
// SetPnumLevel(6,0); //无对应引脚
// SetPnumLevel(10,0); //无对应引脚
// SetPnumLevel(11,0); //无对应引脚
} elseif (action == "左转") {
SetPnumLevel(8, 1);
SetPnumLevel(9, 1);
SetPnumLevel(12, 0);
SetPnumLevel(13, 1);
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "右转") {
SetPnumLevel(8, 1);
SetPnumLevel(9, 1);
SetPnumLevel(12, 1);
SetPnumLevel(13, 0);
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "左旋转") {
SetPnumLevel(7, 1); // P2引脚 E
SetPnumLevel(4, 0); // P13引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "右旋转") {
SetPnumLevel(7, 1); // P2引脚 E
SetPnumLevel(4, 1); // P13引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "张开") {
SetPnumLevel(14, 1); // P3引脚 E
SetPnumLevel(3, 0); // P12引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "闭合") {
SetPnumLevel(14, 1); // P3引脚 E
SetPnumLevel(3, 1); // P12引脚 M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1.6 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "抬起") {
SetPnumLevel(2, 1); // P11引脚 E
gpio_set_level(gpio_num_P1, 0); // M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(1 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
} elseif (action == "放下") {
SetPnumLevel(2, 1); // P11引脚 E
gpio_set_level(gpio_num_P1, 1); // M
if (stop_timer_) {
xTimerStop(stop_timer_, 0);
xTimerChangePeriod(stop_timer_, pdMS_TO_TICKS(0.8 * 1000), 0);
xTimerStart(stop_timer_, 0);
}
}
return ReturnValue(action);
});
}
static void StopMotorCallbackStatic(TimerHandle_t xTimer) {
auto* self = static_cast<Df_K10Board*>(pvTimerGetTimerID(xTimer));
self->StopMotorCallback();
}
void StopMotorCallback() {
SetPnumLevel(8, 0);
SetPnumLevel(9, 0);
SetPnumLevel(12, 0);
SetPnumLevel(13, 0);
SetPnumLevel(14, 0);
SetPnumLevel(3, 0);
SetPnumLevel(2, 0);
SetPnumLevel(7, 0);
SetPnumLevel(4, 0);
}
public:
Df_K10Board() {
InitializeI2c();
InitializeIoExpander();
InitializeSpi();
InitializeIli9341Display();
InitializeButtons();
InitializeIot();
//InitializeCamera();
}
virtual AudioCodec *GetAudioCodec() override {
static K10AudioCodec audio_codec(
i2c_bus_,
AUDIO_INPUT_SAMPLE_RATE,
AUDIO_OUTPUT_SAMPLE_RATE,
AUDIO_I2S_GPIO_MCLK,
AUDIO_I2S_GPIO_BCLK,
AUDIO_I2S_GPIO_WS,
AUDIO_I2S_GPIO_DOUT,
AUDIO_I2S_GPIO_DIN,
AUDIO_CODEC_PA_PIN,
AUDIO_CODEC_ES8311_ADDR,
AUDIO_CODEC_ES7210_ADDR,
AUDIO_INPUT_REFERENCE);
return &audio_codec;
}
//virtual Camera* GetCamera() override {
// return camera_;
//}
virtual Display *GetDisplay() override {
return display_;
}
};
DECLARE_BOARD(Df_K10Board);
Df_K10Board* Df_K10Board::instance_ = nullptr;
项目作者:云天
首发于DF创客社区
转载请注明来源信息
硬件军火库
点击了解详情👆

DFRobot官方品牌店 https://dfrobot.taobao.com/
DFRobot官方旗舰店 https://dfrobot.jd.com/
文中涉及的文件,可以点击阅读原文,到DF创客社区论坛下载,大家有什么想说的,欢迎在下方留言!
往期项目回顾




