
地图为何总是“慢半拍”?百度LD-VLG大模型破解车道级实时更新难题
你是否在路口前被迫急刹,只因导航未及时提示前方临时施工?是否因地图未更新而错过出口、走错匝道,甚至在拥堵中无奈掉头?又是否在城市绕行时发现道路早已改为单向通行,地图却仍显示可直行?
这些高频痛点,根源在于现实道路变化远快于传统地图更新节奏。如今,这一难题正被百度地图 LD-VLG 端到端多模态地图生成大模型系统性破解——它能自动感知道路变化、理解场景语义、生成符合制图规范的车道级矢量地图,成为真正意义上的“地图大脑”。
01 “LD-VLG”是什么
LD-VLG(LD Vision-Language Map Generation Model)是面向高阶智能驾驶与车道级导航研发的端到端多模态大模型,标志着地图数据生产从“规则驱动的分段式 pipeline”迈向统一架构的智能化跃迁[2]。
模型以图像、BEV(鸟瞰图)、轨迹、点云及现有LD车道级地图为输入,经3D视觉重建前馈网络、多模态对齐融合、地图变化思维链推理、车道级地图生成四大核心模块,直接输出高精度、拓扑一致、语义完备的车道级矢量地图,大幅提升自动化率与更新时效,并在复杂城市场景中保持强泛化能力[3]。

02 技术演进脉络
LD地图数据生成与更新的三大核心任务
- 地图生成:从图像、点云、轨迹、BEV、卫星影像等多源异构数据中,自动生成符合车道级精度的矢量要素(如车道线、地面箭头);
- 地图差分:精准识别现实世界与现有地图间的差异,覆盖道路级(新增/封闭)与车道级(占道施工、标线变更、拓扑调整)变化;
- 地图修改:将变化无损融合至地图数据,在几何、拓扑、语义三个维度保障一致性与完整性[4]。
四阶段技术演进
阶段一|规则驱动:基于CNN与人工规则识别地图要素与变化。优势是逻辑清晰、易定位问题;局限在于泛化能力弱,难以应对规模化、碎片化长尾场景[5]。
阶段二|模型驱动:将各子任务升级为专用深度学习模型(如Transformer矢量生成、变化检测、图神经网络融合)。自动化率提升明显,但属模仿学习范式,依赖大量标注,模块间信息传递存在累积误差[6]。
阶段三|多模态大模型:整合生成与变化检测能力,支持图像、BEV、轨迹、点云、地图等多模态联合理解。引入大语言模型推理能力判别变化,但系统仍为模块化拼接,非端到端,接口约束限制全局优化潜力[7]。
阶段四|端到端生成大模型(LD-VLG):将全流程集成于单一神经网络,实现从感知输入到地图输出的联合梯度优化。过程监督覆盖矢量建图、拓扑构建、场景理解等关键环节,显著提升可靠性与可解释性;统一表征驱动多源协同推理,消除模块误差,输出高一致性、高可靠的自动化更新决策[8]。

03 LD-VLG 模型架构
LD-VLG构建了新一代地图数据生产的统一技术架构,实现从多源感知输入到车道级矢量地图生成的端到端闭环[9]。
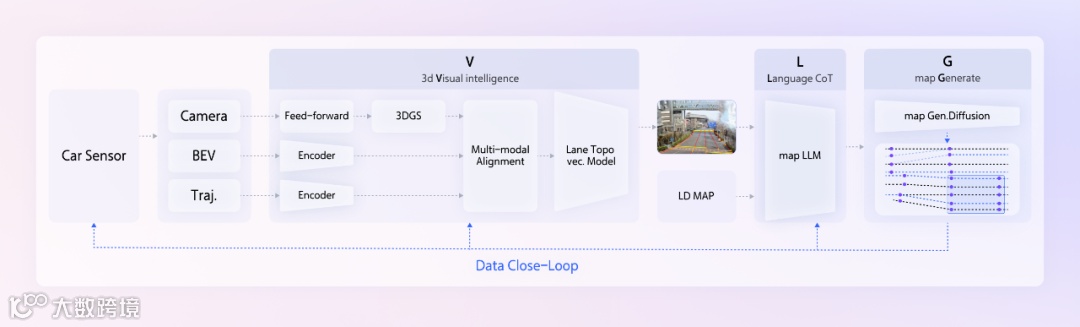
其核心设计包含四大组件:
- V(3D Visual Intelligence):通过feedforward几何感知模型重建3D场景,修正低质量采集数据,精准还原真实道路结构;
- L(Language-based CoT):基于结构化思维链(Chain-of-Thought)推理,深度理解车道级道路语义,识别地图现势性变化;
- G(Map Generation):依托预训练地图生成模型,直接输出更新后的LD矢量地图;
- Data Close-Loop:依托舱驾数据闭环,持续回传线上反馈与不确定案例,驱动地图与模型协同迭代升级[10]。
04 训练范式
LD-VLG采用渐进式三阶段训练策略,系统性构建并强化多模态理解、结构化生成、变化推理与增量更新能力[11]。
1. 基座预训练:多模态编码与对齐能力奠基
- 目标:建立统一语义空间,支撑跨模态互译与高质量矢量生成;
- 方法:通过对比学习与重建任务实现图像/矢量/轨迹/点云/地图多模态对齐;采用自回归Token化建模,预训练强大矢量生成基座;
- 成果:获得具备深度估计、3D空间感知与通用矢量生成能力的基础模型[12]。
2. 多任务微调:生成-变化-融合协同优化
- 目标:将分项能力对齐至“地图更新”终极任务;
- 方法:监督模型输出逻辑严谨的变化决策Token,并联合优化矢量生成结果与地图融合指令;
- 成果:模型可直接输出几何与拓扑一致、可直接驱动地图更新的结构化数据[13]。
3. 强化学习与数据飞轮:策略对齐与持续演进
- 目标:精细化更新决策策略,构建自我演进闭环;
- 方法:构建涵盖几何精度、拓扑正确性、更新必要性、规范符合度的多目标奖励函数,通过强化学习逼近专家水平;结合人工审核反馈与低置信度样本,优先训练长尾场景,形成数据飞轮;
- 成果:自动化率超90%,人工标注需求持续下降,模型能力稳健爬升[14]。
05 成果与展望
LD-VLG作为车道级地图数据更新的基座大模型,创新实现地图生成、变化识别与地图更新的端到端一体化建模。通过过程监督与一致性约束,确保输出结果高可靠、可解释、易维护。依托持续学习的数据飞轮,已全面支撑百度地图实现车道级地图的鲜活、高精与高质量供给[15]。
截至目前,LD-VLG已支撑全国360个城市车道级数据生产,覆盖道路总里程达1300万公里,助力百度地图成为国内首家落地全域车道级导航与智驾的地图服务商[16]。
典型落地场景
车道导向箭头实时更新:融合多帧序列图像与地图先验,抗道路磨损与车辆遮挡干扰,精准识别并更新地面导向箭头[17]。

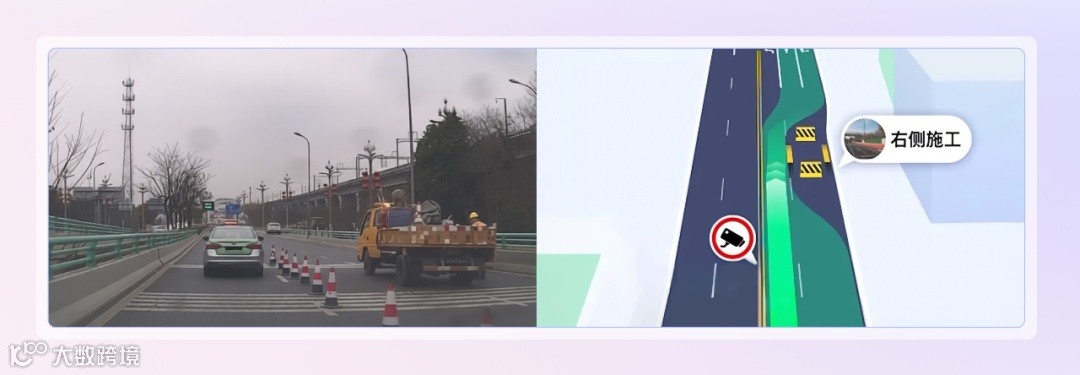
车道级施工动态更新:实时发现占道施工,自动触发动态图层更新,牵引LD地图全要素同步刷新[18]。
路侧停车场全域覆盖:支持全国城市导航终点精准推荐可用路侧停车位[19]。

窄路识别全覆盖:在全国城市道路中实现窄路要素自动识别与车道级建模[20]。

