
机载雷达是装在飞机上的各种雷达的总称。主要用于控制和制导武器,实施空中警戒、侦察,保障准确航行和飞行安全等。现代机载雷达的实际应用主要可以分为三大类:机载火控雷达、机载预警雷达和其他。本文主要探讨机载PD(Pulse Doppler脉冲多普勒)火控雷达的有关情况。
机载火控雷达是机载火控系统的传感器和目标信息的主要来源之一,也是现代军事战争中战斗机和轰炸机不可或缺的装备。对于现代战斗机而言,除了飞机本身的性能之外,机载雷达的性能直接影响战斗机的作战效能。此外,由于战斗机是军用飞机中数量最多的一个机种,所以机载火控雷达也就成为所有机载雷达中数量最多的一种。
脉冲多普勒(PD)体制是现代机载雷达最基本的技术和体制。脉冲多普勒雷达体制的研究就是为了解决机载(包括弹载)雷达的下视(下射)问题。由多普勒效应原理可知,回波的多普勒频率大小反映了在雷达波束照射范围内的目标物体的相对径向速度。也就是说,通过测量目标回波的多普勒频率,可以把运动的目标从不运动的地面(海面)中提取出来。多普勒效应使得雷达排除强杂波的影响检测到目标。与普通脉冲雷达的时域检测不同,脉冲多普勒雷达是在多普勒频域上检测目标,因此使得机载雷达具备了下视(下射)能力。这种雷达具有脉冲雷达的距离分辨力和连续波雷达的速度分辨力,有更强的抑制杂波的能力,因而能在较强的杂波背景中分辨出动目标回波。
机载雷达由于平台运动及下视,面临比地面雷达更加复杂的杂波环境。与地面雷达相比,机载雷达地面杂波区域面积较大,杂波强度远大于目标信号强度。雷达的运动导致主杂波中心频率产生多普勒频移,同时主、副瓣杂波的频谱被展宽。而对于低速运动的地面目标,其多普勒频率与地杂波多普勒频率非常接近,难以区分,这些都使得地面杂波信号对目标信号的影响很大。
机载PD火控雷达与一般雷达相比,特别是与一般地面雷达相比,其系统相对要复杂的多,而且研制的难度也比较大。一方面由于雷达的工作环境,雷达载机平台一旦升空,雷达便处于无人看守、无法维修的状态,所以对雷达自动化和稳定性要求很高;另一方面,为了满足不同的战略需求以及对不同环境中的目标进行检测和识别,要求雷达可以采取多种不同的技术手段。在空对空模式的下视情况以及空对地,空对海下视搜索模式时,采用脉冲多普勒体制,以解决很强的地/海杂波干扰问题;为了改善目标的检测性能以及提高抗干扰能力,采用频率捷变技术;为了获得较大的平均功率,同时得到很好的距离分辨率,采用了脉冲压缩技术。
机载PD火控雷达需要在环境发生变化时(地面杂波、海杂波等,有时面对目标类型也大不相同),可以切换至合适的雷达波形,同时,在后端也需要对应选择适当的信号处理方式,以提取不同军事功能要求的特定目标信息。因此,机载火控雷达必须是可以进行多种模式切换的,一般的机载火控雷达通常具备8-10种空对空火控模式,6-10种的空对地模式。复杂的模式功能需要对于雷达研发人员无疑是个不小的挑战,此外,雷达的大小尺寸和重量也需要被考虑在内。
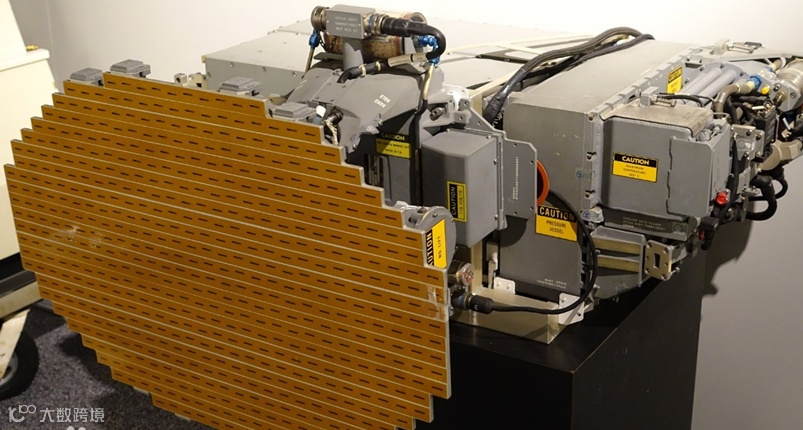
上图是AN/APG-68型机载PD雷达,是为装备美国空军的F-16C/D型战斗机而设计的,是美国西屋公司产品,采用全波形设计,脉冲宽度0.81us~4us,采用椭圆平板缝阵,方位波束宽度3°,俯仰波束宽度4°,雷达体积仅有0.13平方米,工作方式由原来的10种增加到20多种,可同时跟踪10个目标或5个群目标(飞行中队)。
在空对空模式下具有11种工作方式,包括边测距边搜索、搜索高度显示、边速度搜索边测距、边跟踪边搜索、单目标跟踪、空对空搜索与跟踪、空战机动、袭击群目标分辨、改善上视搜索(远程搜索)、战情提示、通过凹口跟踪保持。
在空对地模式下具有7种工作方式:增强实波束地图测绘、扩展地图测绘、多普勒波束锐化、固定目标跟踪、地面动目标显示、地面动目标跟踪、信标
在空对海具有对中/低海情下的舰船探测、海面扩展(类似于地图测绘扩展)等工作方式。

图 AN/APG-77型机载PD雷达
上图是AN/APG-77型机载PD雷达,为有源相控阵雷达,装备美国空军的F22型战斗机,由美国诺·格公司(Northrop Grumman Corp)和雷神公司(Raytheon Systems Company)共同研制,工作在X波段,扫描范围±60°,其每个辐射单元都要独立的收发单元,该雷达系统共计2000多个收发模块,是一部典型的多功能和多工作方式的雷达,其主要的功能有:
● 远距搜索
● 远距提示区搜索
● 全向中距搜索(速度距离搜索)
● 单目标和多目标跟踪
● AMRAAM数传方式(向先进中距空空导弹发送制导修正指令)
● 目标识别
● 群目标分离(入侵判断)
● 气象探测
在空对空模式具有空空搜索与跟踪,空战机动ACM,RWS,VSR,STT,来袭群目标分辨,改善上视搜索,战情提示,气象探测,非合作识别等工作方式。
在空对地模式具有增强实波束地形测绘,扩展地形测绘,多普勒波束锐化(选用地图冻结),信标,地面动目标跟踪,地面动目标显示等工作方式。
在空对海模式具有海面目标探测,固定目标跟踪,海面动目标显示,海面动目标跟踪等工作方式。
参考文献:
[1]王俞奇. 机载PD雷达仿真系统的设计和实现[D].西安电子科技大学,2013.
[2]程刚. 机载PD雷达回波信号建模与仿真技术[D].西安电子科技大学,2007.
[3]葛瑜华. 机载火控雷达系统工作模式仿真实现[D].电子科技大学,2010.
[4]雷达系统知多少之机载火控雷达:
https://mp.weixin.qq.com/s/nRB_f5ck_iiZNnX-Zk16cg