
电子战作为现代战争中的重要组成部分,发挥着越来越重要的作用,而且也越来越成为决定战争胜负的关键因素。战场复杂的电磁环境以及高性能武器的出现对雷达提出了更高的要求,雷达需要具备更宽广、更灵活的态势感知能力,才能做到先敌发现、先敌打击。有源相控阵等先进技术的应用使得雷达具有更强的灵活性,在现代战争中越来越受到重视。相控阵雷达能够根据不同的作战场景及目标威胁程度,选择合适的工作模式,保持对不同类型的目标的实时监视,下面介绍常见的几种相控阵雷达工作模式。

边扫描边跟踪(Track While Scan, TWS)是指通过搜索得到一帧数据后,利用在这一帧中得到的所有观测数据进行数据处理,即进行数据的相关、互联、滤波,以完成多目标跟踪的任务。这种模式为雷达提供了一种初步的多目标监视策略,但由于受数据率的限制,跟踪精度较低,较适用于对多个一般威胁程度目标的跟踪。
在TWS方式中,搜索占主导地位,跟踪不额外占用雷达资源,即没有专门的跟踪波束对目标进行照射,而是利用搜索得到的信息来完成。雷达天线以某个固定速率进行扫描,每次扫描都能够获得目标的距离、角度和速度信息。TWS技术即可以用于机械扫描雷达也可以用于相控阵雷达。
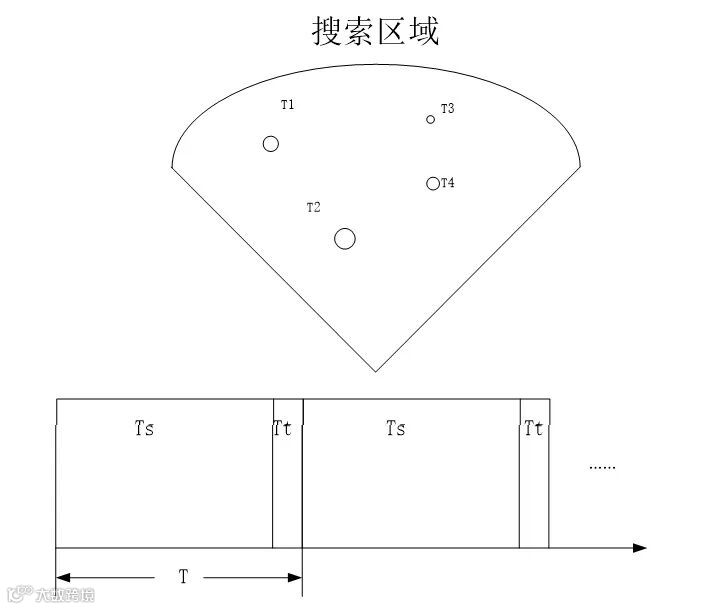
TWS模式下的搜索与跟踪示意以及时间分配图如上图所示,雷达按照固定速率对确定区域进行搜索,每次搜索的结果独立,各帧之间不进行相关处理,跟踪时对帧间的目标进行相关处理,实现对目标的确认和跟踪。
边跟踪边搜索(Track And Search,TAS)指的是跟踪与搜索交替进行或同时进行的跟踪方式。主要依靠相控阵天线波束扫描的灵活性和时间分割原理,跟踪和搜索以不同的数据率交替进行。受雷达资源约束,雷达能同时监视/跟踪/制导的目标数量受到限制。为了节省发射功率和设备量(发射与接收通道数),对搜索数据率应尽可能放宽要求;同时为满足多目标航迹相关等要求,又需要提高跟踪数据率。为了达到以上要求,一般将跟踪时间安插在搜索时间内。该模式适合于目标威胁程度较大,且数目较多的情况。
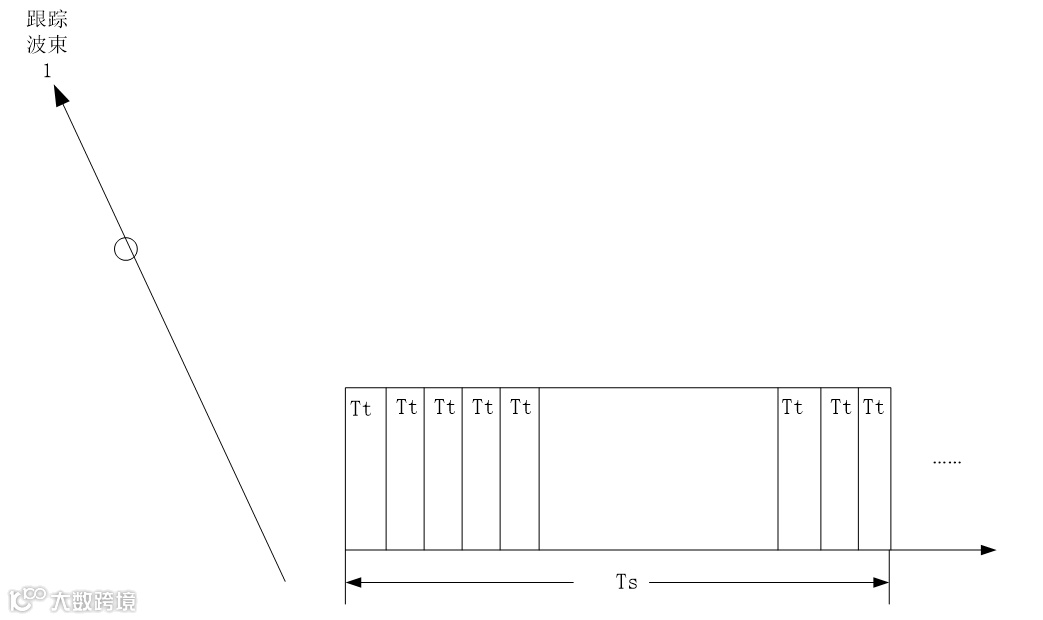
在TAS方式中,搜索模式范围与基本工作方式与TWS相同,区别在于在搜索过程中穿插了大量的跟踪任务波束。雷达将大部分时间和波束资源用于照射已发现的需要跟踪的目标,以达到跟踪数据率要求,波束直接指向目标的当前或预测位置,跟踪占据主导地位。TAS技术只能用于相控阵雷达。

TAS模式下的搜索与跟踪示意以及时间分配图如上图所示,在搜索的过程中根据确定目标的当前或预测位置发射了大量的跟踪波束,得到目标的信息后进入数据处理,具有很高的实时性。
单目标跟踪(Single Target Tracking, STT)模式是指雷达锁定单个目标进行持续跟踪的工作方式。这种模式具有很高的测量精度和数据率,能够提供可靠的精确跟踪、目标参数和交战几何关系,支持对近距格斗、超视距空空导弹的攻击和机炮发射的解算,尤其适用于高机动和小RCS等威胁程度较高的空中目标。
由于 STT 模式只针对单一的目标实施跟踪,所以波束将始终指向被跟踪的目标的当前或预测位置。STT技术只能用于相控阵雷达。
STT模式下的搜索与跟踪示意以及时间分配图如上图所示,在跟踪过程中,雷达连续对目标进行高重频的波束照射,避免目标丢失现象发生,在这个过程中,雷达几乎所有的资源都用于跟踪目标上,其目标跟踪精度与跟踪数据率都会很高。
本文对相控阵雷达常见的几种跟踪模式概念做了简要介绍,实际使用时应根据雷达的任务以及目标的视角、距离、速度等信息,使用不同的工作模式。