

导语:从传统功能域控制器(domain Control Units,根据功能可以分为动力域,底盘域,车身域,智驾域等),向区域控制器(Zonal Control Units,可以是前域控,左域控,右域控,后域控等)发展迭代,已经成为汽车电子,电气架构进化的必然趋势;然而,由于汽车产业中不同公司发展的历史不同,所以开发过程中所采取的电子电气架构也不尽相同,正所谓它山之石可以攻玉,通过学习了解世界主流OEM,一级供应商和半导体公司的域控制器解决方案,可以对各自所要开发的方案起到帮助和借鉴作用,本文主要介绍了以下企业技术方案信息:
目录
1. OEM
1.1 Tesla
1.2 BMW
1.3 Volkswagen Group
1.4 XPeng Motors
2. Tier1
2.1 Continental
2.2 Bosch
2.3 Aptiv
2.4 UAES
3. 半导体公司
3.1 NXP
3.2 Renesas
3.3 Microchip
3.4 Infineon
4. 总结
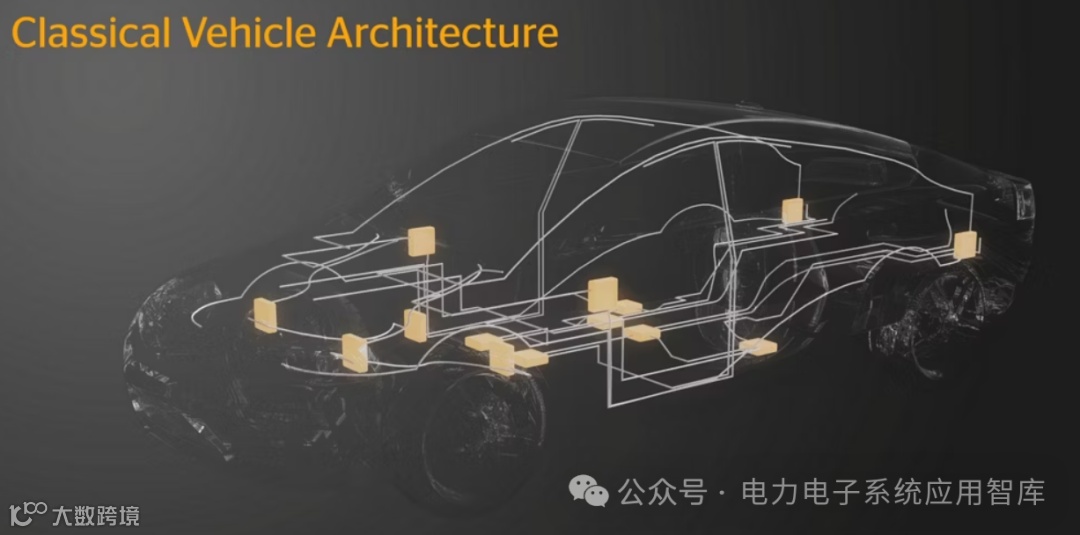
分布式电子电气架构的特征是每个ECU通常只负责一个单一的功能单元,分别控制发动机,刹车,车门等部件,常见的分布式控制器有发动机控制器,变速箱控制器,制动控制器,电池管理系统,车身控制器等。随着车辆向智能化电动化发展,整车ECU数量快速增加,导致总线线束长度变长,线束重量增加,从而导致整车成本增加,汽车装配自动化水平低。分布式计算导致了车内信息孤岛,算力浪费,软硬件耦合深,主机厂严重以来供应商,同时,适用于传动电子电气架构的通信总线也无法提供高宽带通信能力,从而适应大量数据传输和实时处理的需求。
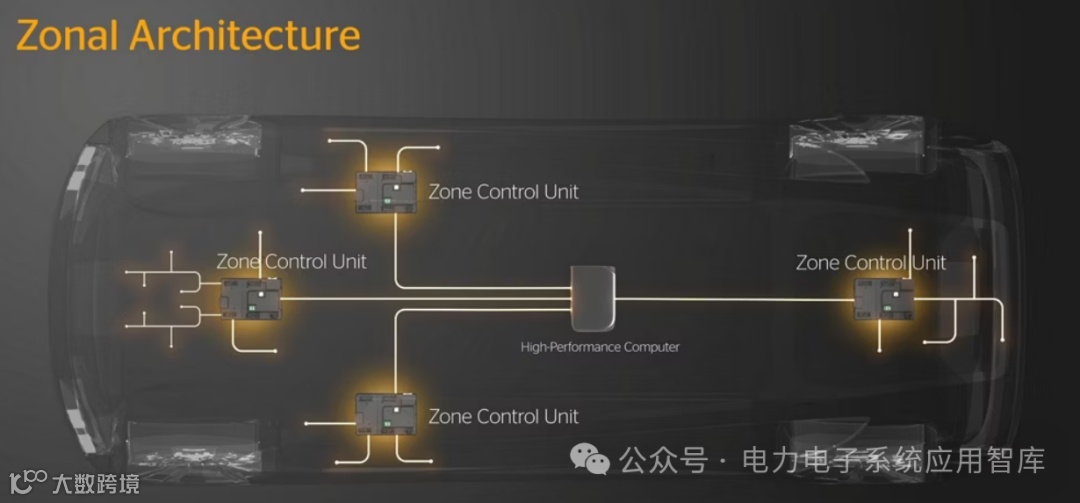
随着芯片和通信技术的不断发展,当前汽车电子电气架构正在朝向功能域控,空间区域和中央控制单元计算迭代发展,由于历史积累的原因,当前域控制器的两条并行发展路径分别是功能域控制器和空间区域控制器:功能域控制器将汽车电子电气架构按照功能区分为动力域,底盘域,座舱域,智驾域和车身域五大类;空间区域控制器则以车辆特定物理区域为边界来进行功能划分,比如特斯拉的区域控制器分为前车身域控制器,左车身域控制器和右车身域控制器,相比较于纯粹以功能为导向的域控制器,空间区域控制器集中化成都更高。

Source:Silicon Motion
区域控制器是基于以位置为优先级进行器件分布与管理,将有效承接整车物理接口,分配区域零部件电源,平衡不同输入输出控制等,以支持智能新能源汽车的跨域融合。这种电子电气架构可以减少线束数量和重量,大幅度减少ECS数量,降低整车成本,同时提高软件开发效率,缩短集成验证周期。
在升级到区域控制电子电气架构时,对于不同OEM和世界不同地区,其进化阶段会由于实际现状而呈现不同进展。北美公司中特斯拉已经实现了区域控制的全面领先,福特和通用规划在2026年落地;中国的主机厂制定了较为激进的区域控制开发计划,试图仅仅跟住特斯拉的技术迭代,同时由于有一些新势力公司,从头开发新的车型,因此可以直接采用区域控制+中央计算的电子电气架构,所以进展比较迅速;欧洲主机厂在新型电子电气架构层面始终跟进中国公司;韩国主机厂一开始主要聚焦在功能域控制器,会在下一代车型预计2030年导入区域控制器。

1.1 OEM: Tesla
Tesla Model3 以前车身,右车身和左车身区域控制器为核心,各个区域控制器除了负责临近设备的控制和供电外,前车身域控实现暖通空调系统控制,左车身域控实现油门,刹车和转向信号的采集。
前车身区域控制器位于车头前舱附近,离低压蓄电池较近,方便取电,其作为一级配电中心,将电能分别传输给左,右区域控制器,以及为智能驾驶控制器和座舱控制器供电。左车身域控制器位于主驾小腿左前方,沿车身纵向安装,负责司机位及车辆左侧设备的配电(作为二级配电)和控制,右车身区域控制器位于副驾小腿右前方,沿车身纵向安装,负责车辆右侧设备的配电(作为二级配电)和控制,同时还负责超声波雷达的接入。

Source:Silicon Motion
1.2 OEM: BMW
BMW将会逐步从功能域控电子电气架构,转向区域控制架构,从而增加线束的模块化设计,可配置的以太网开关减少了网关的使用和维护,以太网通信的主要内容是SOA-SOME/IP和PDU通道,同时以太网可以扩展至10BASET1S, 网络性能通过MACSec得以改善。中央计算单元将实现智驾,智能座舱,驾驶性和动力总成,以及其他相关车身功能的计算任务,各个不同的功能间通过以太网相互通信。

Source:BMW
1.3 OEM: Volkswagen Group
大众汽车与小鹏汽车联合开发适用于中国汽车市场的区域控制电子电气架构,包括区域控制器,中央计算机,云和后端连接。通过这种新型区域电子电气架构,可以进一步降低ECU的复杂性,减少整车分布式ECU的数量;实现功能的快速实施,并通过OTA持续进行系统更新,为全自动驾驶做好储备;同时可以在成本降低上体现明显优势,预计2026年将会投放市场。

Source:VW
1.4 OEM: XPeng Motors
小鹏汽车电子电气架构根据各个控制器功能特点采用不同的融合方案,其扶摇架构包含自动驾驶域控制器,座舱域控制器,左区域控制器和右区域控制器,实现了中央+区域的电子电气架构,从而实现智能化的迭代周期,大幅度提升OTA速率;主干网络的通讯速率大幅提升,支持高速NGP大算力,大数据量通信的需求;在各个区域控制器中,智能运算主要在自动驾驶和座舱域控制器中完成,整车控制功能主要是在左右两个区域控制器中完成,实现了智能平台与整车控制平台实现了一定的分区,这样可以确保系统的高级别信息安全。

Source:XPeng Motors
2.1 Tier1: Continental
传统汽车电子电气架构逐步向区域架构转换,区域控制器作为软件定义汽车时代下的最关键组件,通过集中化的电子电气架构和进一步解耦的软硬件功能,可以降低整车网络复杂性,降低整车开发成本。靠近传感器和执行器的区域控制器组成了中间层,高性能中央控制单元(HPC)承担服务层的任务,而分离的传感器和执行器则组成了最靠近功能实施的组件,从而确保所有智能任务可以在不同层级得以分配。
Source:Continental

Source:Continental
区域控制器承担了通讯网管的功能,提供智能电源分配,高可靠性实施跨域整车实时控制功能,比如音响控制,外部声控,自主泊车,空调或者悬架等。每个区域控制器将相关功能集中在车辆局部子区域,比如前右侧,左侧或者车辆后方,负责相关区域所有的控制,服务和数据管理任务。这样可以优化区域控制器与电子组件间的线束连接,数量不多的区域控制器通过以太网与高性能中央控制单元(HPC)连接,这样可以降低开发复杂性,减轻整车重量,进一步降低二氧化碳排放。
Source:Continental
模块化的设计使得根据特定应用需求对区域控制器进行适配成为可能,经过验证的应用软件可以在新车型上重复使用,可以减少验证工作并加快开发速度,缩短上市时间。

Source:Continental
模块化和可扩展的跨功能域区域控制器具有以下特性:1. 模块化和高度可扩展性的ZCU(Zonal Control Unit)平台支持快速适配性开发;2. ZCU平台支持灵活集成自研或者第三方软件模块;3. 高度可扩展性的机械设计概念,并配备多种连接器形式;4. 支持性能从低到高的不同微控制器应用;5. 灵活的总线系统和智能配电解决方案;6. 平台化设计支持功能安全ASIL C等级,甚至可以支持ASIL D等级。

Source:Continental
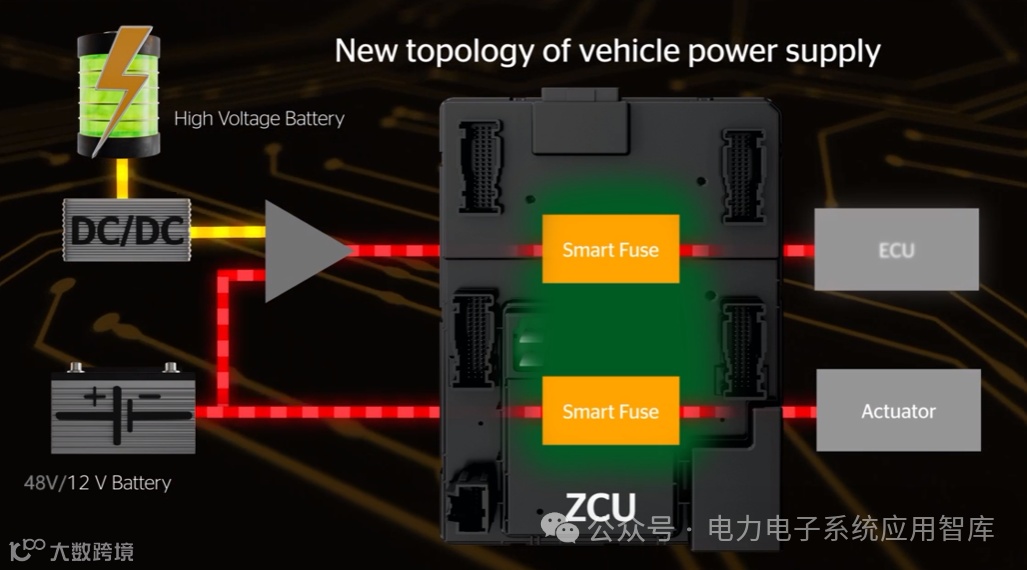
基于服务的电子电气架构和新型智能保险丝允许在车辆架构中实现分散式配电,区域控制器可以为相应区域的控制单元,传感器和执行器供电,可以分散控制区域中的功耗,并提高电源监控和诊断能力,同时支持软件控制配电功能,根据负载优先级分配电力,除了减少线束长度,直径和复杂性外,还可以满足功能安全要求的可选冗余电源。智能电源分配是新的整车电源管理拓扑,具备以下特性:1. 电源管理功能分布在不同区域控制器中;2. 基于eFUSE具备智能保护功能的线束连接;3. 降低了连接线束的数量,长度和直径;4. 使能在特定场景下的Fail-Operational (失效可运行)。
Source:Continental
结论:区域控制器作为基于服务区域控制架构的组成部分,其进化过程不会一蹴而就,而是要根据技术迭代,各家主机厂和供应商现阶段技术现状,逐步进化至区域控制器;每个区域控制器会将局部子区域的跨域传感器和执行器进行逻辑运算和处理,下一步迭代方向就是减少车内的线束连接,减少单个控制器的数量;在朝向区域控制器迭代的过程中,每一步进化都需要技术变革支撑,智能配电或者软硬件解耦,新一代的控制器需要增加算力,以支撑不同加速和虚拟化能力;作为面向服务电子电气架构的重要组成内容,区域控制器的模块化和可扩展性需要在设计中充分考虑并加以重视。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
2_1_1_Continental_The importance of Zone Control Units in Software Defined Vehicles
2_1_2_Continental_onepager_zone_control_unit_Product Information
2.2 Tier1: Bosch
传统分布式电子电气架构在可更新型,可定制型和连接性方面无法进一步扩展,因此转向基于整车中央计算单元控制的电子电气架构,汽车行业正在加速这种进程的转变。

面向功能的分布式电子电气架构,相比于面向服务的电子电气架构,会呈现出ECU数量多,线束连接冗长,功能开发不容易迁移和升级等缺点,因此,面向服务的电子电气架构将会成为未来软件定义汽车背景下的发展趋势。然而,软件定义汽车将仅仅会改变功能域控制器中功能的分布,但不会移除所有相关功能。
Source:Bosch
在转向中央计算控制单元的区域控制电子电气架构进程中,控制器的存在会呈现多种不同的集成形式。单独的功能域控制器将会在新型电子电气架构中逐步消失,但是由于主机厂管理流程,不同功能需求以及技术限制等原因,其功能还仍然会在其他ECU中存在。其中一种已经被采用的集成方式就是"共享壳体"形式的物理集成,不同的控制器装配在一个相同的机械壳体中,比如智能座舱域和智能驾驶域,其功能实现都依赖于高性能计算芯片和对散热敏感的存储相关组件,这样可以共用控制器的散热系统以及其他可能的基础组件;除了共用壳体的物理集成方式外,相同PCB上布局多控制芯片的方式也在逐步应用,同时这种集成方式也将带来更进一步的集成度和成本降低;在对成本更加敏感的应用中,基于高性能SoC的解决方案代表着更高等级的集成水平,也就是系统集成,这种集成方式通常在软件层面进行功能隔离,比如通过虚拟机来实现,同时这种集成方式还通过硬件隔离如不同CPU来实现,这种集成方式在功能免于干扰角度,是最复杂的集成方式。
Source:Bosch
结论:以中央计算单元为核心的区域控制电子电气架构毋庸置疑是汽车电子电气架构的未来发展趋势,但考虑到各个不同公司的技术储备和历史积累,同时为了确保设计与成本收益之间的平衡,必须务实的推动电子电气架构转型,特别是要基于现有的技术基础,而在进化过程中,没有放之四海而皆准的解决方案,会通过不同的控制器集成呈现方式,逐步达到以中央计算单元为核心的区域控制架构。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
2_2_1_bosch_The next step in EE architectures
2.3 Tier1: Aptiv
功能域控制器(Domain Controllers)是指控制与特定功能相关的一组控制器,需要使用功能域控制器的场景通常是计算密集的,通常有大量的输入输出设备,这些功能域可以是主动安全,用户体验,动力总成,车身或者底盘,主动安全功能域包含相机,激光雷达和毫米波雷达,用户感知功能域包含仪表控制,多媒体系统和温控系统,车身控制功能域包括座椅控制,门控和悬架控制等。在转向软件定义汽车和高级电子电气架构发展过程中,第一步就是将相关功能集中到功能域控制器。

Source:Aptiv
车辆中ECU数量的不断增加给电源和数据分配所需的布线带来复杂性,支持主动安全功能的传感器技术爆炸性增长也推动了I/O的复杂性,不断上升的劳动力成本迫使制造商寻找自动化程度更高的线束组装方式,解决这些困难的关键在于,随着车辆进一步转向智能车辆架构,功能域控制器承接的功能控制任务会转移到区域控制器(Zonal Controller),区域控制器是在车辆中用作配电和数据连接中心的节点,负责处理传感器,执行器和外围设备的I/O,将I/O从计算中抽离出来。
C.A.S.E.(互联,自动驾驶,共享,电气化)功能要求车内的供电回路能够被监控,并支持实时诊断。配电系统的智能数字化转型,将传统的继电器-保险丝组合转换为智能熔断器,每个转换可以节省2瓦的功率耗散,从而可以提高内燃机的油耗,延长电动汽车电池的寿命;同时,智能熔断器还可以实现更好的能源管理,系统可以根据实际功耗需求智能关闭某些功能;相比于传统的电线设计,使用智能熔断器还可以减小线束的直径,从而进一步减轻线束重量。
配电系统数字化转型意味着新型配电系统中将包含更多的软件组件,软件在频繁迭代和软件系统层级的测试与传统配电系统也不相同,需要采用各种在环(模型在环MIL,软件在环SIL,硬件在环HIL)以及虚拟控制器(Virtual ECU)的方式开展相关活动,这就意味着配电系统的开发将从原有的模拟系统为主转向数字系统为主。
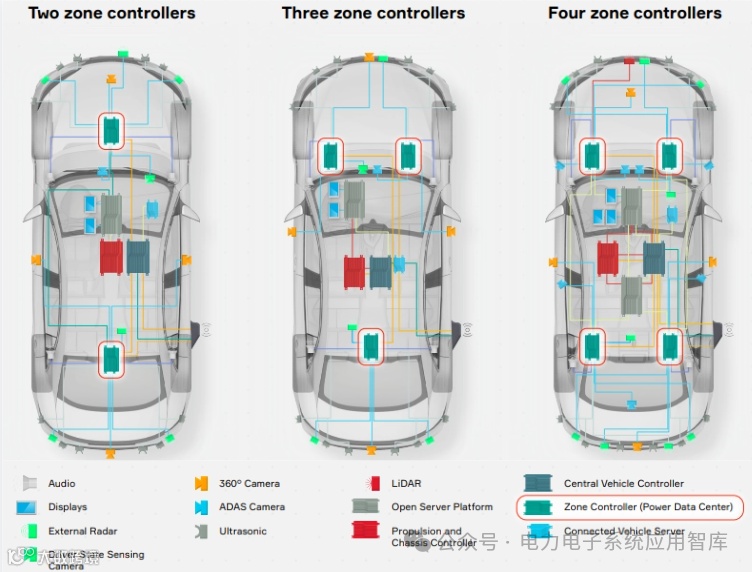
当然,区域控制器在整车的配置方式还要取决于具体的客户需求和整车的复杂程度,可以根据实际需求为车辆配置数量不同的区域控制器。
Source:Aptiv
最终,功能域控制器和区域控制器会进一步整合到面向服务的中央计算单元,从而成为开放服务器平台,使得所有相关开发人员都可以构建创新的应用程序,以新的方式合作开发软件。随着车辆自动驾驶级别越来越高并承担越来越多驾驶任务,强大,集中而且故障后仍能运行的计算变得越来越重要。

Source:Aptiv
总结:功能域控制器和区域控制器是汽车电气电气架构走向中央计算单元,基于服务的开放平台的必经之路;区域控制器的一个重要功能就是承接智能配电,具备节能,减少线束数量和重量,并支持实时诊断的多重优势,也意味着配电功能从原来的模拟控制转化为数字控制为主;车上区域控制器的数量与实际的需求紧密相关,可根据实际情况配置不同为不同数量,电子电气架构的最终趋势是面向服务的中央计算单元。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
2_3_1_aptiv_zone controller build bridge to tomorrow technoloty
2_3_2_aptiv_Smart Vehicle Architectures
2.4 Tier1: UAES
联合电子推出的区域控制器使得整车控制器数量大幅度降低,多维度降低整车研发成本,升级了传统供电网络布局,使得汽车电子电气架构朝着智能化,电动化方向的发展更进一步。
区域控制器的特点和优势主要有:1. 功能高度集成:支持车身相关功能控制,如内外灯,门锁,雨刮,喇叭,座椅,车身防盗等,支持新能源汽车动力相关功能控制,实现跨域融合(动力域+车身域),比如空调热管理,高压活锁等,还可以集成底盘域的EPB(电子手刹)功能到区域控制器中,通过左右区域控制器各控制一路制动卡钳,还集成了复杂的算法如车窗防夹(纹波防夹技术应用于无框车门,对于纹波计数的精度提出了更高的要求,同时还要求算法鲁棒性更强),尾门防夹,PEPS等;2. 支持智能配电功能:承接整车一级配电功能,通过智能熔断器efuse控制输出,具备故障(如线束短路,负载过流)保护能力,支持故障诊断和自恢复,同时休眠时还可以实现智能低功耗供电,配电设计上还应用了A/B双电网冗余设计,可以实现电源备份,满足多种行车安全场景;3. 通信资源丰富:支持多路CAN,LIN和以太网通信,同时还可以支持OTA刷新;4. I/O 资源丰富:集成数字信号检测,模拟信号检测,高压互锁信号检测,高低边驱动,efuse配电输出等I/O功能。

Source:UAES
结论:UAES按照前后左右4个不同位置,开发区域控制器,所开发的控制器成为了配电枢纽,为整车或者所在区域提供安全高效的供电网络;是I/O枢纽,将更多的软硬件接口集中开发;也是数据枢纽,具有更大带宽和更易升级的拓扑。
3.1 半导体公司:NXP
自动驾驶,软件定义汽车和电气化等技术发展的进化,使得汽车的电子电气架构也在朝着中央计算,以太网高速通信,面向服务的架构,区域控制和输入输出接口集中化的方向转变。
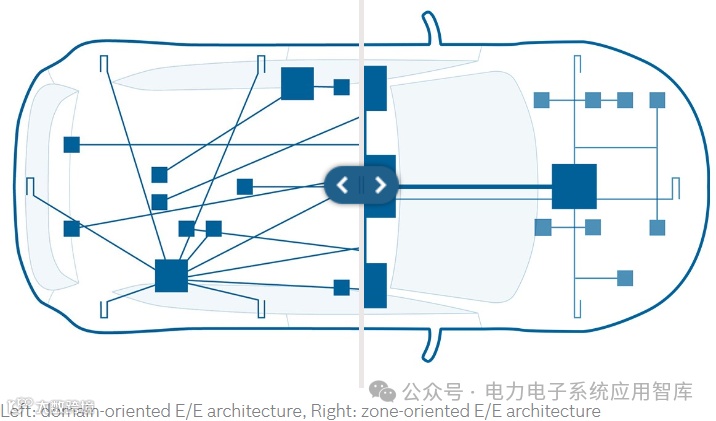
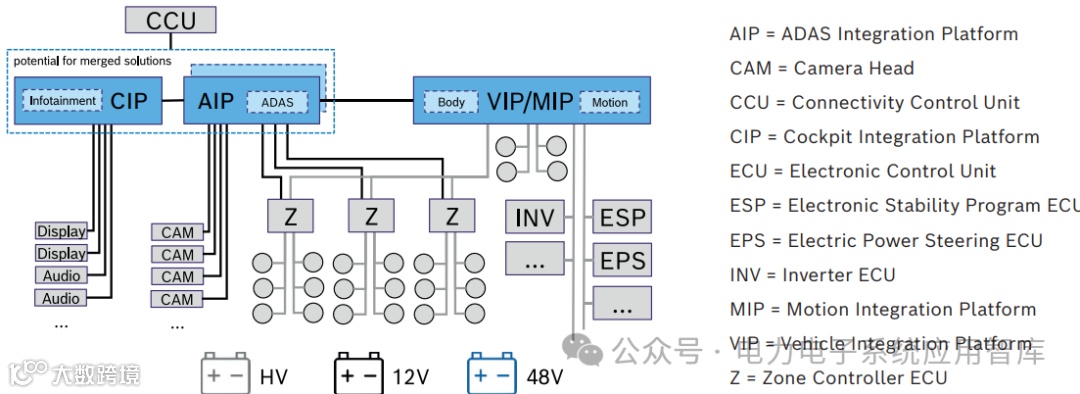
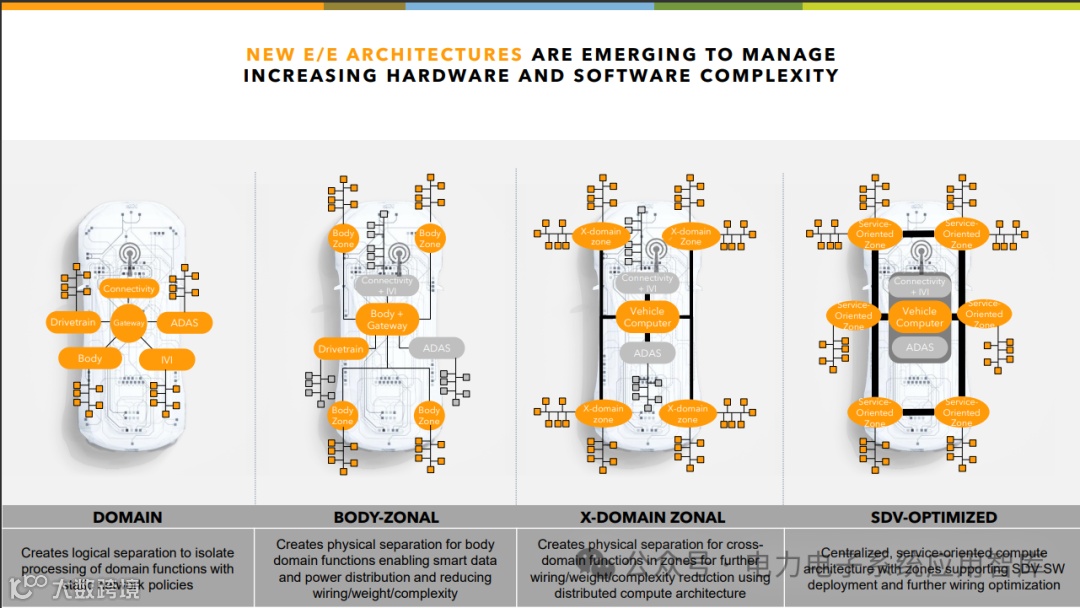
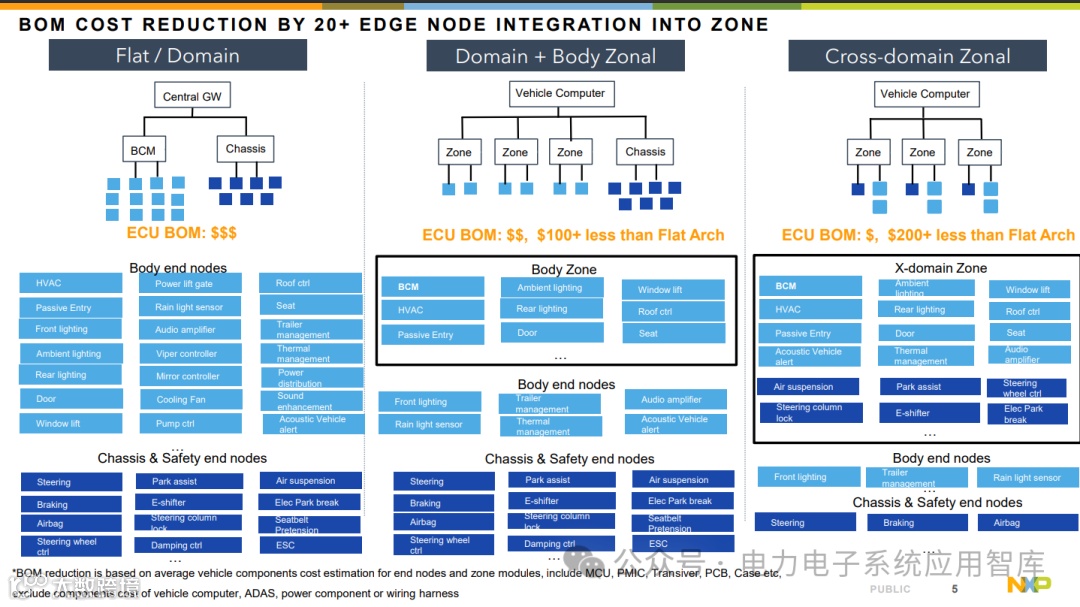
为了进一步高效管理逐步增加的软硬件复杂性,出现了基于功能和区域分配的不同电子电气架构种类。功能域控电子电气架构:通过逻辑区分和静态网络,隔离不同功能域的逻辑,根据功能可以分为智驾域,车身域,动力总成域,底盘域,这些不同的功能域通过网关与云端通信;基于车身的空间区域电子电气架构:车身控制相关的功能通过区域进行划分,使能智能数据管理和电能分配,减少线束数量和重量,降低开发复杂性,而其他功能域的功能保持不变;跨功能域区域控制,通过分布式计算架构,将不同功能域的功能也配置在对应的区域控制器中,以进一步减少线束数量和重量,降低开发复杂度;软件定义汽车最优化的电子电气架构,中央计算,面向服务的中央计算区域架构支持关键定义汽车开发,同时进一步优化线束连接。
Source:NXP
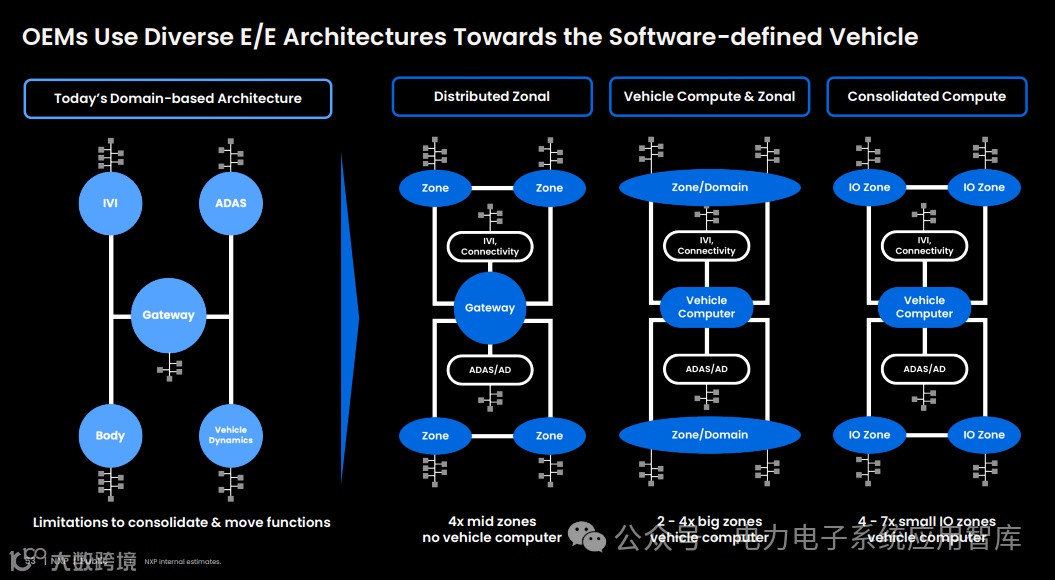
当前主流的功能域电子电气架构对于功能进一步迭代开发和转移有一定限制,分布式区域架构包含4个中级的区域控制器,但是没有整车中央计算单元,跨功能域区域架构包含2-4个高级的区域控制器和整车中央计算单元,最优化的电子电气架构则包含4-7个小型输入输出区域控制器和整车中央计算单元。
Source:NXP
通过将功能域相关的边缘模式集成到对应的区域控制器中,可以降低控制器开发的成本。从分布式电子电气架构升级到功能域与车身区域控制架构时,可以p少100+美元的BOM成本,再升级到跨域区域控制电子电气架构时,相比于分布式电子电气架构,BOM成本可以较少200+美元。
Source:NXP
尽管软件定义汽车最优化的的电子电气架构是未来的必然趋势,然而在开发区域控制器的过程中,会面临理论和现实的诸多困难。当前阶段,基于中央MCU的区域控制器架构仅仅能够支持车身域相关的功能,一旦将跨功能域的功能集成到现有区域控制器中,由于成本压力,集成时机和芯片技术的限制,会使得区域控制器的开发变得复杂很多。理论上,区域控制器可以分为左前,右前,左后,右后四个区域,各个区域控制器仅仅包含各自区域内的控制单元和控制开关;实际开发中,将动力域相关功能集成到前区域控制器中时,则需要实时的处理器,同时需要实现动力控制相关的功能,使得区域控制器开发变得复杂很多。

Source:NXP
为了应对区域控制器进化开发过程中的困难和挑战,NXP在多个半导体芯片上做好了技术储备,包括主控MCU,电源管理芯片SBC/PMIC, 支持不同速率边缘计算的以太网通信收发器芯片,以及应对传统的CAN和LIN通信技术。

Source:NXP
总结:在从基于功能域控制器的电子电气架构向软件定义汽车最优化的区域控制电子电气架构进化过程中,会存在基于车身的空间区域电子电气架构,跨功能域区域控制等中间形态,尽管毋庸置疑的是区域控制电子电气架构相比于功能域控架构,一定会带来BOM成本的优化,在开发区域控制器的过程中,会面临理论和现实的诸多挑战,NXP在多个半导体器件层面做好了技术储备,以应对这些挑战。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
3_1_1_NXP_Accelerating-the-automotive-shift-to-zonal-architectures-1(40页)
3_1_1_NXP_Accelerating-the-automotive-shift-to-zonal-architectures-1(40页)
3_1_3_NXP_2024年投资者峰会原始报告-_Presentation(94页)
3.2 半导体公司:Renesas
传统汽车开发正在向C.A.S.E.(互联,自动驾驶,共享,电气化)的技术方向不断演进,汽车内整体计算性能和通信负荷呈指数增长。传统汽车分布式电子电气架构需要大量的ECU,相应增加了电缆线束的复杂性和重量,增加了整体功耗,提高了整车成本。
实际开发过程中,对于新成立的公司,没有历史遗留问题的开发团队,可以从设计之初一开始就采用空间区域控制器架构;而对于传统汽车公司,其开发迭代并不是完全从零开始,还要同时保留对现有ECU软件的投入和维护开发,意味着对于这类公司而言,其开发进程要从现有的分布式电子电气架构,逐步过渡到区域控制器架构。

Source:Renesas
空间区域控制器将很多功能和服务整合到一个ECU中,区域控制器的网络对带宽,确定性和最大延迟会有更高要求,ECU对计算性能需求也会有很大提升,同时,区域控制器还要保证各个应用程序间(不同安全等级)免于干扰,以保证功能安全和网络安全,保持实时并支持内部网络路由加速。

Source:Renesas
常见区域控制器的主要组成部分和功能为:1. 电源及网络管理主要通过PMIC芯片和唤醒MCU实现,使得区域控制器满足功耗和供电要求;2. 智能配电功能,通过基于eFUSE的技术,对相关区域的其他ECU,传感器,执行器和负载进行智能配电,提高电能使用效率,增加诊断覆盖率和功能安全等级;3. 通信功能,需要根据区域内通信的实际需求,配备CAN/CANFD, LIN, 以太网等通讯功能;4. 输入输出功能,包含音频接口,SENT协议接口,数字输入输出接口,模拟输入输出接口等;5. 驱动功能,包含对H桥和高低边开关的驱动能力。

Source:Renesas
为了应对区域控制器到来时软件开发的各种挑战,比如将控制器中包含的来自不同供应商的应用程序如何被整合?当ECU发生故障时,谁来负责分析调试的根本原因,同时,当区域控制器中一个微小的不见发生变化时,整个ECU的重复测试工作量也会非常巨大。可以通过虚拟控制器和Hypervisor来解决这些挑战,将一个物理ECU变成多个虚拟ECU,每个虚拟ECU都是一个单独的ECU,通过COM和虚拟网络与其他虚拟ECU进行通信。
配合区域控制器的软件开发,瑞萨开发了虚拟平台使得开发左移,所开发的虚拟平台可以帮助系统开发商专注于系统层级的需求开发,减少依赖硬件才能开展测试项目的测试人力,可以使得软硬件开发进一步解耦,同时在硬件原型开发出来前,就可以启动虚拟软件开发工作,达到开发左移的目的。

Source:Renesas
总结:从分布式电子电气架构发展到区域控制器架构,对通信,算力,安全性提出了众多挑战,区域控制器一般具备电源及网络管理,智能配电,通信,输入输出和驱动等功能,为了解决域控制器开发过程中面对的复杂软件开发,瑞萨开发了虚拟平台,使得软件开发左移成为可能。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
3_2_1_Renesas_Zone-ECU Virtualization Solution Platform.
3.3 半导体公司:Microchip
汽车电子设备日益复杂,导致线束笨重复杂,影响车辆性能和制造效率,5G通信,V2X技术和高级驾驶辅助系统等新兴技术正在将车辆转变为需要高速计算的移动数据中心;区域控制电子电气架构根据物理位置将车辆划分为多个区域,从而减少电缆长度,简化线束设计,提高模块化和效率,同时,区域控制电子电气架构还可以使得线束制造的自动化程度更高,符合人机协作的工业5.0原则。

Source:Microchip
区域控制电子电气架构的开发进展和节奏因制造商的历史积累和当前技术水平而有所差异,甚至一个公司内不同车辆型号之间也会存在一定差异,然而通过模块化和高度可扩展性的设计,可以将域控控制电子电气架构灵活适用于不同应用。
区域控制器作为数据传输中枢,需要具备以太网通信的接口,以应对高速大量数据的通信需求,Microchip公司推出的以太网解决方案,具有唤醒睡眠的所有特性,符合IEEE相关标准,裸片面积可以节省75%以上,为车辆所有通信转向以太网做好了技术解决方案。

Source:Microchip
总结:区域控制器电子电气架构在数据高速计算和线束重量优化方面有明显优势,区域控制电子电气架构的开发进展和节奏因制造商的历史积累和当前技术水平而有所差异,Microchip公司为车载高速以太网通信准备了较为完备的技术解决方案。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
3_3_1_te-connectivity-microchip-technology-zonal-architecture-delivering-new-standards-of-connectivity-for-automotive-and-beyond.
3.4 半导体公司:Infineon
随着车辆电子电气架构从传统分布式架构转向区域控制架构,车载ECU的数量会大幅度减少。然而由于传统的ECU软硬件都能够提供所需功能,并经过时间验证其可靠性,因此转向中央计算单元和区域控制的电子电气架构,不会一蹴而就,一定会有很多不同形式的中间版本电子电气架构产生。区域控制器一般按照位置布局,将聚合独立于域的软件和硬件,可以分为前后左右不同区域控制器,从2025到2030年之间,每个整车将会配备2个甚至更多的中央计算系统,每个中央计算系统会连接多个区域控制器。

Source:Infineon
在整车电子电气架构转向功能域控和区域控制更为集中的架构时,整车配电网络则是转向去集中化的架构,使得各个区域控制器承接智能配电的功能,一级配电,二级配电功能均可以在区域控制器上实现,随着自动驾驶和线控运动控制,智能配电也需要考虑对应的功能安全需求,确保故障发生情况下的失效安全和失效可运行。

Source:Infineon
随着区域控制电子电气架构逐步在车上开发落地,整车低压网络会逐步从12V向48V转换,从而实现整体成本节省,低碳化的目标。

Source:Infineon
总结:整车电子电气架构从分布式转向区域控制和中央集中计算单元的路径不会一蹴而就,而是需要考虑产业内不同公司的技术积累,中间状态会存在比较多的功能域控+区域控制的融合;在电子电气架构朝向集中化方向发展同时,整车配电网络则是朝着去集中化的方向发展,为了解决整车负载功率增多带来的功耗问题,48V低压网络也将逐渐上车取代传统12V低压网络。
备注:完整技术资料可以扫描二维码添加公众号微信索取或者在知识星球内查阅:
3_4_1_Infineon-Zonal_DC-DC_48_V12_V_Converter_for_Automotive-ApplicationPresentation-v02_00-EN
3_4_2_Infineon-What_designers_need_to_know_about_wire_protection-ApplicationNotes-v01_00-EN
3_4_3_Infineon-Dependability_and_Zonal_Architectures-Presentations-v01_00-EN
3_4_4_Infineon Chip set soutions and design support for Automotive PDC and Zone Controllers
4. 总结
汽车电子电气架构从功能域控转向区域控制已经成为汽车发展的必然趋势;由于各家公司历史积累不同,对于新开发车型所需要背负的历史包袱也不同,因此其在转向区域控制电子电气架构的进度也会呈现不同进度。不过,从功能迭代来看,车身相关控制功能会首先被整合到区域控制器中,这一趋势在量产的Tesla Model3中已经可以看出,再后面动力总成和底盘相关的控制功能也会被整合到区域控制器中,这些功能的传感器和执行器等I/O功能会通过区域控制器来整合,而自动驾驶和智能座舱相关的控制,其计算能力明显会超过一般区域控制器所能提供的计算能力,因此这些功能可能需要中央或者专用域控计算单元来实现。

Source:McKinsey & Company
区域控制器将会以车辆物理位置为区分,实现功能集成,会逐步集成传统功能域中的车身域,动力总成域和底盘域的相关功能;区域控制器还要承接智能配电的功能,可能是一级配电或者是二级配电;此外,作为中央计算单元和执行架构的中间枢纽,区域控制器还要具备丰富的通信资源,I/O资源和驱动能力。
具体详细材料可在知识星球中下载,欢迎查阅,学习。

电力电子系统工程智库
专注电力电子各种系统应用,
行业最新技术进展,落地解决方案。

点击【阅读原文】,进入【电力电子系统应用智库】知识星球。