新朋友点上方「虚拟现实产品超市」订阅本刊

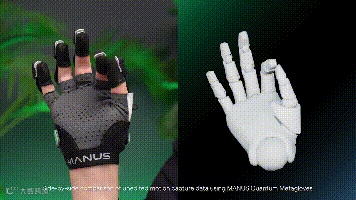
远程操作使人类能够通过自然的指尖动作来控制机械手。基于我们使用MANUS Metagloves Pro和PSYONIC Ability Hand进行的内部测试,本工作流程概述了如何使用MANUS的高精度手指追踪技术和PSYONIC的自适应机械手,创建一个响应迅速、实时的ROS 2远程操作设置。

开始之前你需要准备什么
此工作流程需要MANUS Metagloves Pro手套、PSYONIC Ability Hand辅助手以及运行 ROS 2的Linux工作站。虽然 MANUS Core基于Windows系统,但Linux系统可以使用MANUS Integrated SDK,该SDK可将手套数据直接传输到 Linux 环境中。MANUS ROS 2节点发布关节角度数据,而 PSYONIC ROS 2节点则向Ability Hand辅助手发送控制命令。

分步安装说明
1. 连接硬件
将 Metagloves Pro 加密狗连接到您的Linux工作站,并使用MANUS集成SDK将手指数据流式传输到ROS 2。安装ROS 2,并下载MANUS ROS 2软件包和PSYONIC ROS 2 Python包装器。

MANUS节点发布原始数据和关节角度数据,而PSYONIC软件包提供用于控制Ability Hand的命令接口。一旦两者都激活,系统即可通过转换层进行集成。
2. 创建翻译层
翻译层将MANUS输出连接到PSYONIC输入。
由于人手的运动学结构比Ability Hand的驱动模型包含更多的自由度 (DOF),因此需要将 MANUS 关节角度映射到机器人手的指令中。
MANUS 提供操作者手部的MCP、PIP 和 DIP角度(以度为单位),这些角度合并成每个手指的单一标准化弯曲值,并映射到PSYONIC手指位置界面。
3. 微调数据
翻译层运行后,测试基本手势以发现缩放问题或偏移:
- 张开的手
- 拳头
- 捏
- 三脚架握把
进行一些细微的调整,例如缩放、零偏移校正或轻微平滑处理,都是正常的,尤其是在将连续的人体运动映射到Ability Hand的减少的自由度时。

常见问题及故障排除
内部测试中发现的大部分挑战都来自拇指,因为需要将其映射到自由度较低的“能力手”的拇指上。MANUS提供了详细的拇指参数,包括屈曲和掌外展,而机器人的拇指仅接受基本的屈曲输入。
该难题通过以下方式解决:
- 拇指旋转 → 使用
ThumbMCPspread,略微缩放 - 拇指屈曲 → 与其他手指一样,结合掌指关节/指间关节的屈曲,然后应用一个小的比例因子
这样可以产生稳定、可预测的拇指运动,而不会发生意外旋转。
结论
将MANUS Metagloves Pro与PSYONIC Ability Hand配合使用,可实现简洁、实时的远程操控设置,高度模拟自然手指运动。借助MANUS集成SDK、简单的转换层和轻量级校准,开发者能够实现流畅直观的机械手控制,适用于研究、开发和具身人工智能实验。
你一定还感兴趣:

《第九届元宇宙数字人设计大赛》在京开幕, 搜维尔科技助推中国数字人产业发展

【搜维尔科技】xsens+manus VR+Faceware 面部动画工作全流程!

Techviz:手指追踪技术在专业工程领域的5个经典使用案例
【搜维尔科技】Manus VR全新的量子追踪技术,视频案例合集!


【搜维尔科技】SenseGlove Nova力反馈手套测试中

数据手套-适用于机器人、人工智能和机器学习解决方案