

当前的3D感知模型遵循单数据集训练-测试范式。这种单数据集训练-测试范式面临两个主要挑战:1)3D感知数据集差异大:现有的3D感知数据集是由不同厂商采用不同类型传感器采集获得的,具有强的dataset-level数据分布差异、taxonomy分布差异;2)3D感知模型通用性弱:当感知模型在一个数据集(域)上训练并且直接部署到另一个数据集上时,通常会面临更严重的感知性能下降。
本次分享我们邀请到了上海人工智能实验室-智能交通平台(ADLab)团队-青年研究员张铂,为大家介绍他们CVPR 2023上的工作:
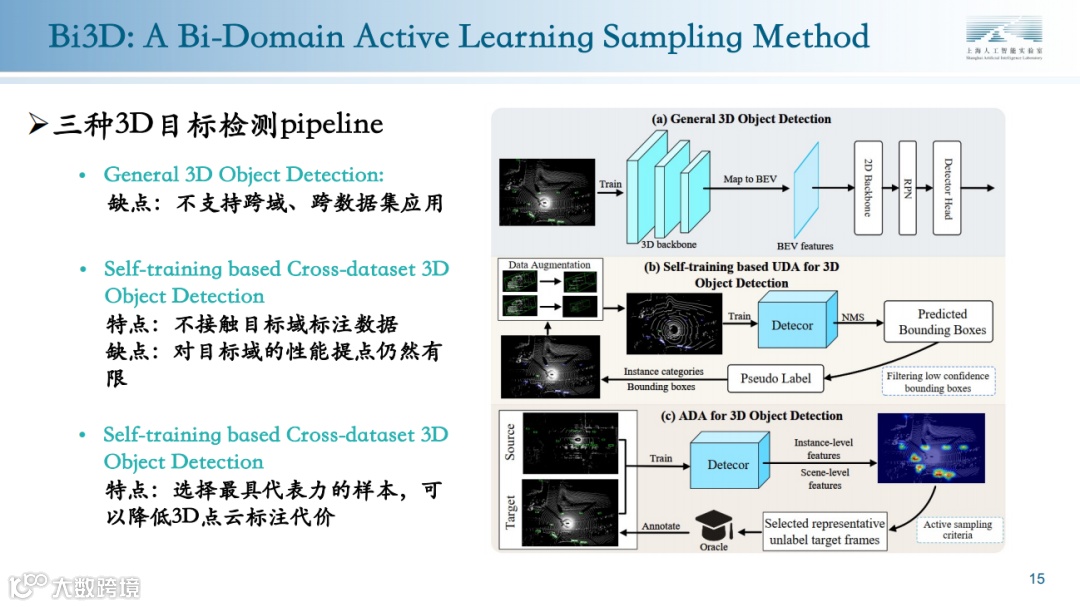
Bi3D: Bi-domain Active Learning for Cross-domain 3D Object Detection
Uni3D: A Unified Baseline for Multi-dataset 3D Object Detection
“本次talk主要针对目前3D感知模型单数据集训练-测试范式面临的主要两个挑战,结合我们初步探索的一些经验,简要介绍我们团队在CVPR-2023中发表的两篇论文:Uni3D和Bi3D,并分析如何在海量3D感知数据集中以较低的代价实现开放场景应用。”
极市直播|CVPR2023-张铂:自动驾驶场景下模型通用表征学习与泛化性的思考
➤论文
➤回放视频在这里☟


往期线上分享集锦:http://m6z.cn/6qIJzE(或直接阅读原文)
如果觉得有用,就请分享到朋友圈吧!
推荐阅读

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
