

巅慧科技可以利用超精密位移/角度定位机构的组合实现多种形式的光束角度与位移补偿系统的设计,以保证在特殊应用中光束传输的稳定性,例如在成像、半导体检测、光通信等光学应用领域。
根据应用场景不同,其设计方案可以分为单纯的角度或位移补偿系统,及角度与位移的综合补偿系统;根据补偿维度的需求,可以设计成一维补偿及二维补偿系统。
本文将分享动态稳像的二维角度补偿系统、二维位移补偿系统(一阶系统)及半导体检测领域的二维角度与位移补偿系统(二阶系统)四种设计方案。
二维角度补偿系统

在用于全景雷达的云台监控系统中,由于需要匀速或变速进行空间扫描,在旋转运动中进行成像,云台的运动会造成图像拖影,此时,需要采用二维角度补偿系统对光路进行补偿,从而使拍摄的图像清晰化。
由于云台的运动为角度运动,因此,可以用一个双轴快反镜(FSM)来实现两个反向的角度补偿。

设计思路如下:
1.云台的陀螺系统将两轴运动的速度与加速度信息回传给主控板;
2.主控板根据运动的积分数据,计算出拍摄时每一帧的补偿量,作为控制主令发送至快反镜驱动控制系统;
3.快反镜根据控制主令,进行角度补偿,快反镜的位移传感器将实时角度信息回传至驱动控制器,并与控制主令进行差分运算,使快反镜得以高速准确的响应;

二维位移补偿系统

以无人机光电吊舱应用为例,在拍摄过程中,平台本身处于运动状态,机身抖动造成的干扰会使成像变得模糊,因此,采用二维位移补偿系统对抖动进行补偿,从而使拍摄的图像清晰化。
由于光电吊舱平台的抖动为位移运动,因此,可以用一个双轴微扫平台(FSP)来实现二维的抖动补偿。

设计思路如下:
1.光电吊舱的陀螺系统将运动速度与加速度信息回传给主控板;
2.主控板根据运动的积分数据,计算出补偿量,作为控制主令发送至微扫平台的驱动控制系统;
3.微扫平台根据控制主令,带动镜头进行位移补偿,微扫平台的位移传感器将平台的实时位移信息回传至驱动控制器,并与控制主令进行差分运算,使微扫平台得以高速准确的响应;

二阶光束稳定系统
相对于上述一阶光束稳定系统,在某些特殊应用领域,例如半导体检测领域,对检测激光束的稳定性要求非常苛刻,需要同时对光束角度与位移进行补偿,利用巅慧科技的多种微纳定位产品,可以构筑一些非常复杂的综合光束稳定系统(二阶光束稳定系统)。
二维角度与位移补偿系统(位移台+快反镜方案)

在此方案中,位移补偿系统相对比较特殊,将综合系统拆分开来看,所使用的位移台是仅Z向运动的,带动反射镜片前后伸缩运动从而使反射光束平移而方向不发生改变。因此,不能使用双轴系统,而必须采用两套单轴系统垂直安装。


设计思路如下:
1.单路补偿系统的构成是:将单轴快反镜安装于Z向位移台上,快反镜的转动控制角度补偿,位移台的伸缩控制光束平移补偿;
2.采用激光加工中扫描头的设计思路,两套整合式单轴补偿机构垂直安装,其中一个方向的补偿系统控制X轴方向的位移与角度补偿,另一个方向的补偿系统控制Y方向的位移与角度补偿;
3.采用两次分光光路,分别将光路由两路PSD位置探测器进行检测,检测出的信号回传至总控系统,计算出补偿机构的补偿量,分别作为控制主令传输至单位位移台与快反镜,实现实时同步补偿。

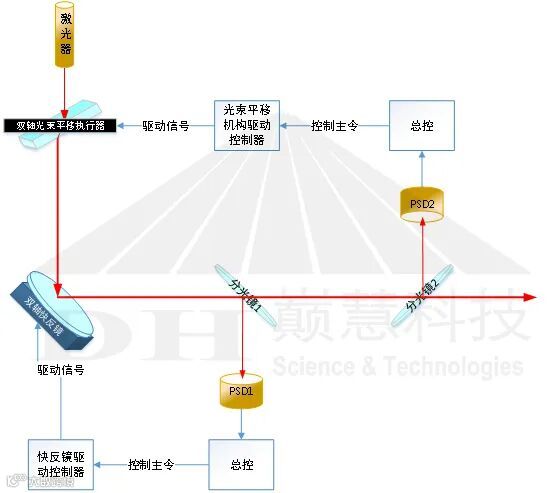
二维角度与位移补偿系统(光束平移执行器+快反镜)

用于位移补偿的位移台如果替换为特殊的光束平移执行器,则可以通过一套双轴光束平移执行器和一套双轴快反镜,来实现上述补偿系统的设计,整合性更好,结构更简单。
光束平移执行器采用平行玻璃折射原理,将平行平板玻璃镜片的转动转换为入射光束的平移运动,用于光学补偿领域,在光源单色性比较好的场合非常适用。
此光束平移执行器可以用4个压电/音圈电机执行器设计成双轴机构,同时完成X与Y两个方向的光束平移控制。

设计思路如下:
1.用双轴光束平移执行器实现二维位移补偿;
2.用双轴快反镜系统实现二维角度补偿;
3.采用两次分光光路,分别将光路由两路PSD位置探测器进行检测,检测出的信号回传至总控系统,计算出补偿机构的补偿量,分别作为控制主令传输至双轴光束平移执行器和双轴快反镜,实现实时同步补偿。
系统部件介绍
双轴压电快反镜与压电驱动控制器


压电快反镜FSM-250.02

压电驱动控制器AMP-030
在补偿角度较小,频率较高的场合,多采用双轴压电快反镜。以压电快反镜FSM-250.02为例,通常情况下,快反镜集成内置应变片传感器,驱动控制器与传感器反馈的信号形成闭环控制。
压电快反镜FSM-250.02参数

双轴压电快反镜与压电驱动控制器


双轴音圈快反镜

音圈驱动控制器(单板)
在补偿角度较大,频率略低的场合,多采用双轴音圈快反镜。以音圈快反镜FSM-750.02为例,快反镜集成内置电容位移传感器,驱动控制器与传感器反馈的信号形成闭环控制。
音圈快反镜FSM-750.02参数

双轴压电微扫平台(FSP)与压电驱动控制器

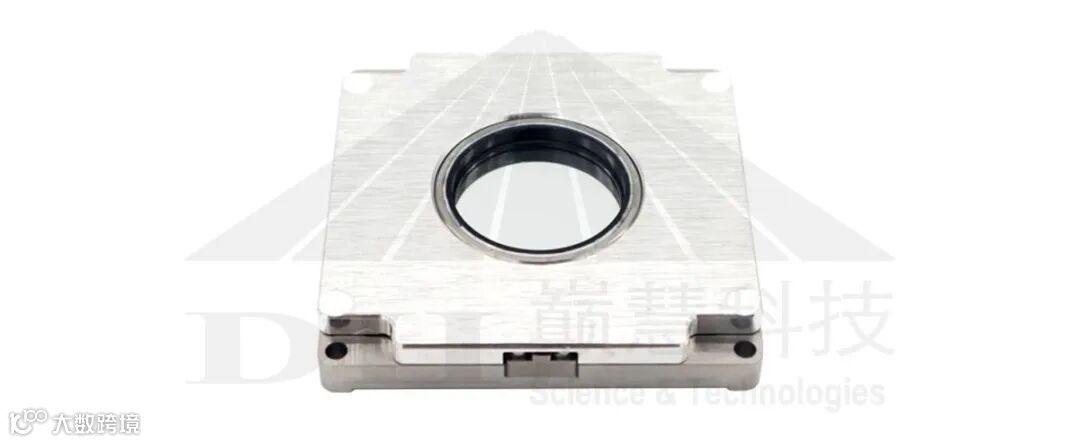

中孔安装透镜,用于运动平台动态稳像的微扫平台(FSP)。以微扫平台FSP-400.0X为例,微扫平台可集成内置应变片传感器,驱动控制器与传感器反馈的信号形成闭环控制;也可作为开环系统使用,与外部传感器形成闭环控制。
压电微扫平台 FSP-400.0X 参数

双轴压电位移台与压电驱动控制器



具有一定带载能力的微纳位移台。位移台集成内置电容位移传感器,驱动控制器与传感器反馈的信号形成闭环控制。
压电位移台 WYT 参数

电容位移传感器与解调器


单极性电容位移传感器。作为超精密传感的核心部件,可集成在上述所有微纳定位产品中,作为测距或测角传感器使用;也可以作为独立测量元件。
电容位移传感器 CAP-PC 参数


