
点击上方“蓝字”,关注更多精彩

压电纳米位移台的命名是由三部分组成:“压电”指执行器种类,是以PZT压电陶瓷叠堆作为驱动源;“纳米”指精度等级,移动端面在PZT压电陶瓷的驱动下,可以实现纳米级精度的步进或连续运动;“位移系统”指运动方式,其实现的是X、Y、Z向一维或多维的平移运动。
压电纳米位移系统是将PZT压电陶瓷与柔性铰链结构、金属壳体结构相结合,并配备有机械固定安装接口与负载安装接口。
压电纳米位移系统可直接带动负载进行微位移调节,其运动面有螺纹孔用于安装固定负载。此外,压电纳米位移系统可集成于各类高精密装备,为其提供纳米级运动控制、光路控制等。
双轴压电微扫平台

双轴压电微扫平台带有一个中孔,用于安装透射镜,是一款面向航天、航空、兵器工业等应用方向产品,采用开环前馈控制,具有结构紧凑、体积小、运动范围大、成本低等特点。
主要用于动态稳像领域,在移动平台上,根据陀螺仪反馈回的速度和加速度信息,在拍摄时高速沿移动平台运动方向反向位移,用以平衡运动状态造成的拖影。

图1. 双轴压电微扫平台产品图
双轴压电微扫平台由叠堆型压电陶瓷执行器提供驱动力,经过位移放大机构,柔性机构推动透镜进行2X2扫描,由于叠堆型压电陶瓷执行器响应速度快,体积小,出力大刚度高,可以根据控制信号实现毫秒级快速定位响应。

图2. 双轴压电快速扫描定位平台示意图
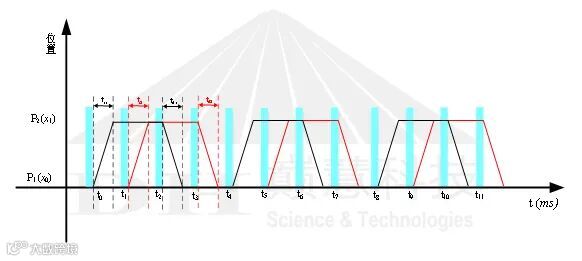
图3. 2X2扫描工作时序

图4. 双轴压电快速扫描定位平台结构
双轴压电快速扫描定位平台可执行X,Y的两轴扫描,如图3所示,根据外部成像积分信号触发时序,平台执行相应位移控制实现镜片的2X2快速扫描。
双轴压电快速扫描定位平台外形图如图4所示,尺寸为70mm*70mm*11mm。为了将扫描定位平台技术集成到红外成像系统中,双轴压电快速扫描定位平台的体积和重量是必须严格控制的问题。在这方面,压电陶瓷叠堆执行器具有优势。
因此,采用基于压电陶瓷叠堆执行器的双轴压电快速扫描定位平台的技术。压电陶瓷叠堆执行器虽然可以有体积紧凑、重量轻集成度高的特点,但是输出位移小。采用位移放大机构实现压电陶瓷叠堆执行器输出位移的放大,如图5所示。

图5. 压电快速扫描定位平台的基本工作原理示意图
压电纳米位移平台

压电纳米位移平台是非中孔式位移台,有一定的承重负载能力,是一款面向半导体制造、光纤制造、激光直写等应用方向的产品,采用闭环负反馈控制,具有结构紧凑、体积小、运动范围大、成本低等特点。主要用于带动负载进行纳米级精度的位移,以实现超精密定位加工的用途。
压电纳米位移平台由叠堆型压电陶瓷执行器提供驱动力,经过位移放大机构,柔性机构推动移动端面进行1X1、2X2或3X3高精度位移,由于叠堆型压电陶瓷执行器响应速度快,体积小,出力大刚度高,可以根据控制信号实现毫秒级快速定位响应。

图6. 压电纳米位移平台示意图
压电纳米位移平台同压电微扫平台一样,采用压电陶瓷叠堆直推技术,压电陶瓷叠堆执行器虽然可以有体积紧凑、重量轻集成度高的特点,但是输出位移小。采用位移放大机构实现压电陶瓷叠堆执行器输出位移的放大。
铠装执行器

铠装执行器是一款独立的运动驱动源,将多个压电陶瓷叠堆串联并封装以实现较大的机械行程,同时保证很高的分辨率及响应速度,在此基础上设计相应的位移放大机构、柔性铰链,并集成位移传感器,就可以实现多种形式的纳米级精度的位移定位机构。可根据实际需求,设计相应的产品。

图7. 铠装执行器产品图
铠装执行器根据使用场景的需要,集成的压电陶瓷叠堆数量会有所变化,以适应不同的机械行程需求;铠装执行器往往设计成开环系统。

图8. 铠装执行器结构及工作原理图
压电步进电机位移台

直推式的压电纳米位移台,其机械行程一般较小(50μm-300μm);机械行程与控制精度往往不会跨数量级(当机械行程在微米级时,控制精度在纳米级),但有的应用场景需要使用在较大机械行程(1mm-3mm)的同时,保证较高的控制精度(1nm);直推式的驱动方式就无法满足这种应用场景的需求,需要采用特殊的压电步进电机的设计,用多组垂直与水平向差分式压电陶瓷组,交替运动实现步进运动,就可以实现满足较高控制精度的大行程运动。

图9. 压电步进电机工作原理动图
如图9所示,1-4压电陶瓷为横向位移压电陶瓷,实现对称压紧与松开的动作,A-D压电陶瓷为纵向位移压电陶瓷,实现驱动位移输出端的纵向运动;在运动过程中,1、2先横向收缩,使A、B远离位移输出端,同时3、4横向伸长,将C、D压紧,此时C、D纵向移动,利用摩擦力使位移输出端实现第一步步进运动;当到达步长极限的时候,3、4横向收缩,同时1、2先横向伸长,将A、B压紧,此时A、B纵向移动,利用摩擦力使位移输出端实现第二步步进运动;2组压电陶瓷结构交替运动,就实现了长距离的步进位移运动。

