2025年是人形机器人量产元年,灵巧手作为核心零部件,在成本中占比较高,且正朝着高自由度、高感知能力方向发展,拓展人形机器人的功能边界。本报告重点解析灵巧手的技术构成与产业应用现状。
为什么灵巧手是核心零部件
什么是灵巧手?
机器人灵巧手(Dexterous Robot Hand)是以人类手部结构为原型设计的仿生末端执行器,具备多自由度驱动、多模态传感和智能控制能力,可完成抓取、捏合、拧动、装配等精细操作,是机器人与物理环境交互的核心部件。
它不仅是机械手的升级,更是追求类人级灵活操作的智能终端,旨在让机器人适应复杂、非结构化环境,执行传统设备难以完成的任务。

灵巧手的四大核心特征
高自由度结构:复刻手部灵活度
通过模拟人手关节运动,实现多自由度操控,提升操作灵活性。

多模态传感系统:赋予“手”感知力
集成力、触觉、视觉等多种传感器,实现对接触力、物体形状、表面纹理等信息的实时感知。
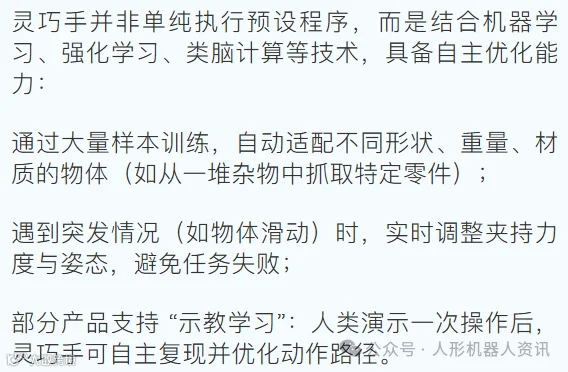
智能决策与学习能力:让操作更聪明
结合AI算法与强化学习技术,使灵巧手具备自适应抓取、动态调整姿态的能力。
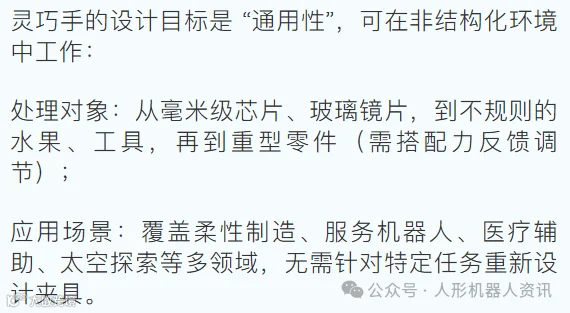
广谱适应性:突破单一任务局限
可应对多样化物体与任务场景,从规则工件到易碎品均能稳定操作,适用于工业、服务、家庭等多领域。
应用层面:人形概念的具现式
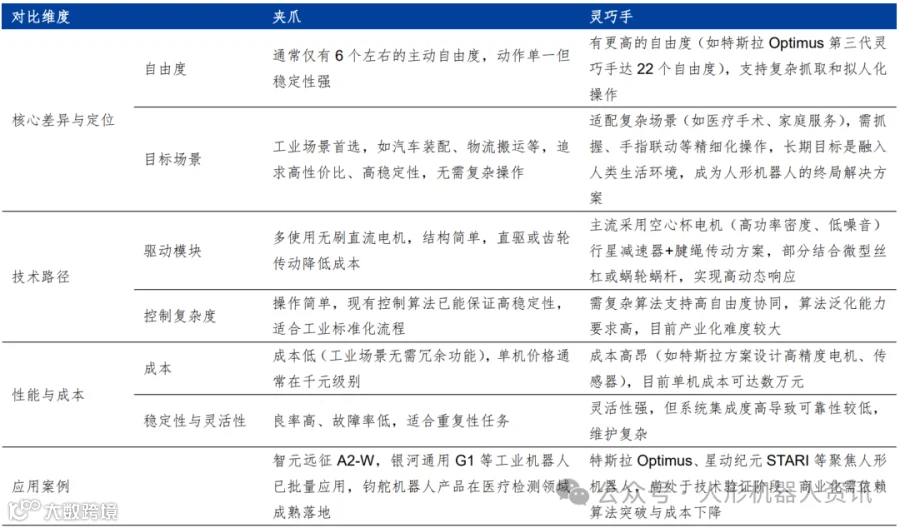
传统机器人末端执行器如夹爪,虽具备高稳定性,但灵活性有限,主要适用于标准化流程。而人形机器人需执行非标任务,对末端操作的灵活性与精准度要求更高。
灵巧手因其结构高度仿人,成为人形机器人功能落地的关键体现,广泛应用于抓握小物、搬运、装配等复杂操作。

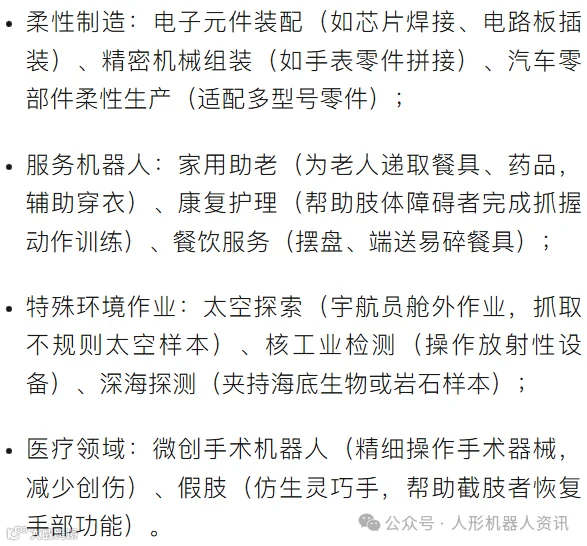
典型应用场景:从工业到生活的“手”护
灵巧手凭借其泛化能力强、精度高等优势,已在多个领域展现应用潜力:
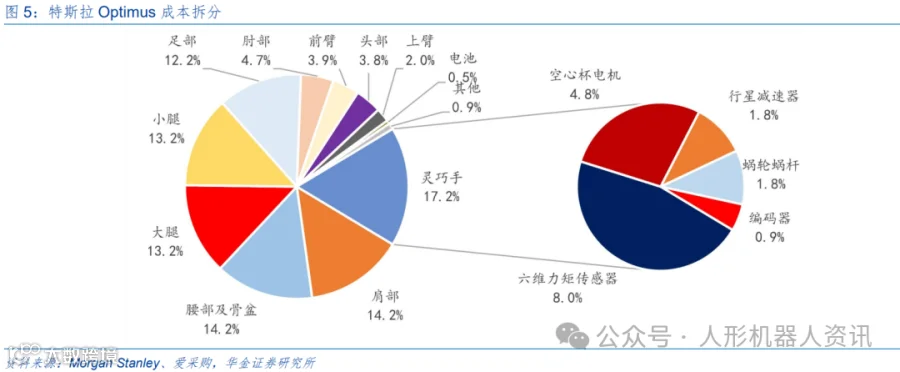
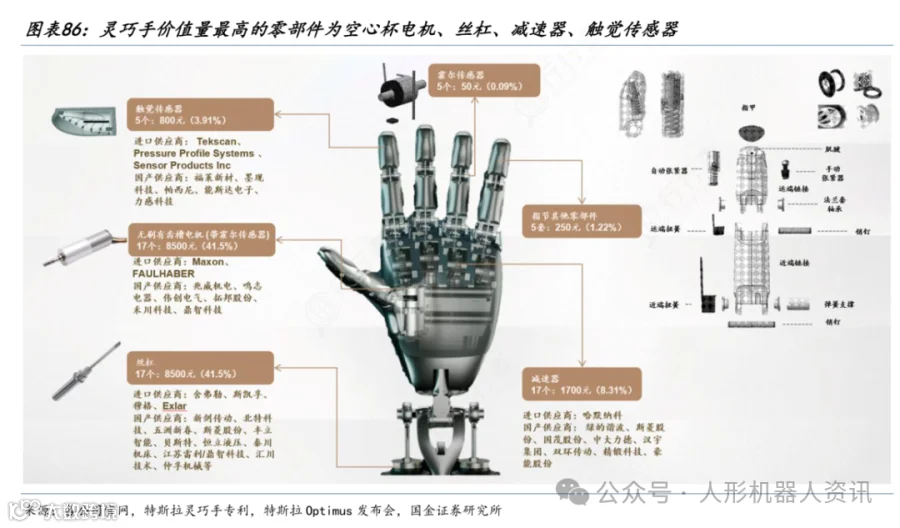
成本层面:灵巧手占整机成本约17%
以特斯拉Optimus为例,灵巧手成本占比达17.2%,居各部件之首。其中六维力传感器占8.0%、空心杯电机占4.8%,二者为核心组件;行星减速器、蜗轮蜗杆各占1.8%,编码器占0.9%。
迭代层面:灵巧性与感知力持续提升
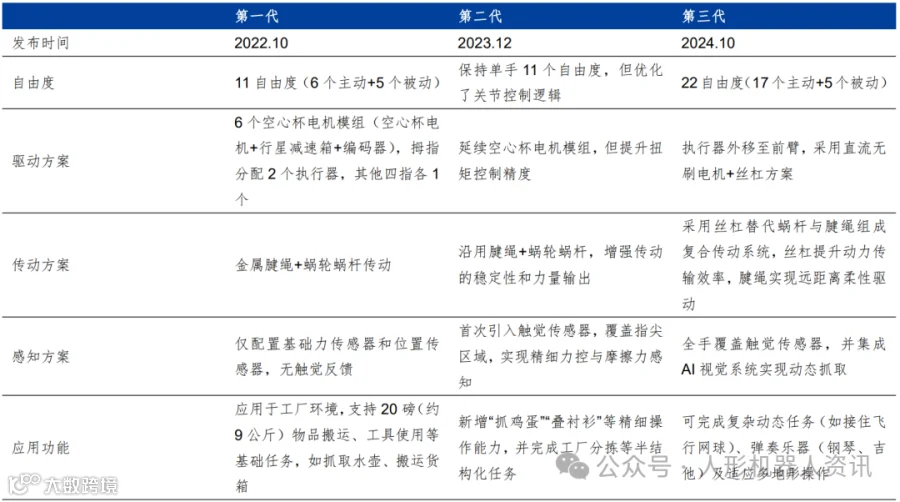
当前灵巧手技术尚未收敛,整体向更高自由度与更强感知能力演进。以特斯拉Optimus为例,其灵巧手从初代11个自由度升级至第三代22个自由度,并由仅有力/位置传感器发展为全手覆盖触觉传感器,结合AI视觉实现动态抓取。
灵巧手的三大模块技术拆解
灵巧手主要由驱动、传动、感知三大模块构成。
电机驱动为灵巧手主流方案
当前主流采用电机驱动系统,集成空心杯电机、无刷有槽电机及减速器,具有体积小、响应快、调控便捷、输出稳定等优势。
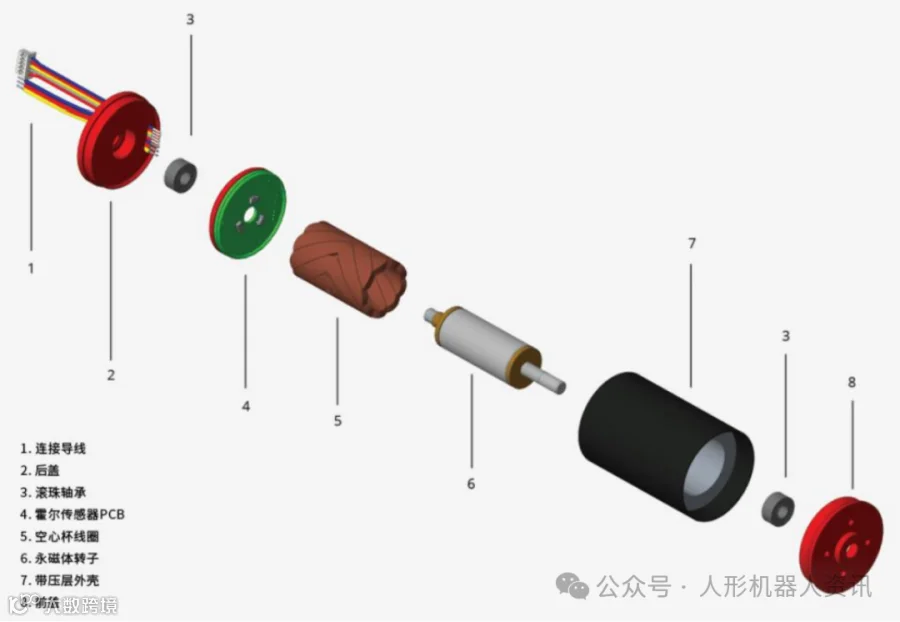
空心杯电机因无铁芯转子设计,避免涡流损耗,具备高效率、轻量化、低发热特性,已成为灵巧手驱动核心部件。
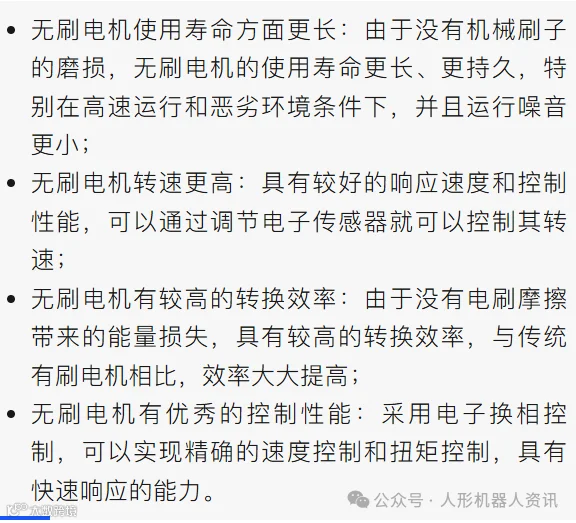
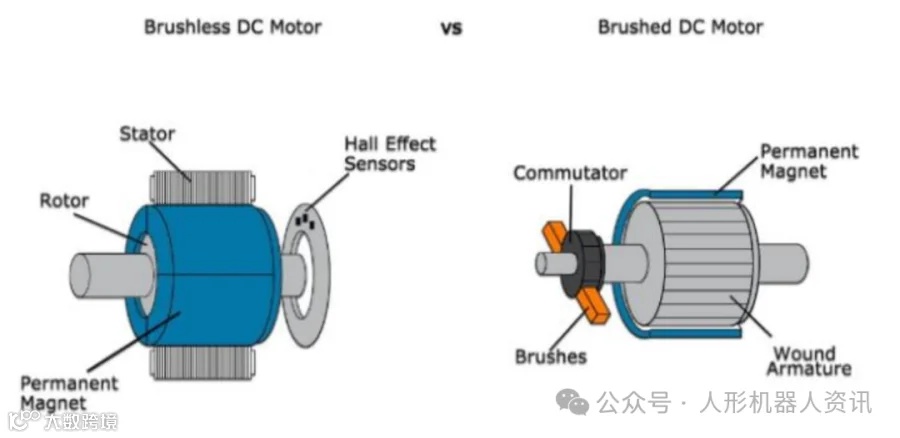
直流无刷电机相比有刷电机寿命更长、噪音更低、维护成本更少,广泛用于高端灵巧手设计。
传动方式:技术路线未收敛,短期内多方案并存
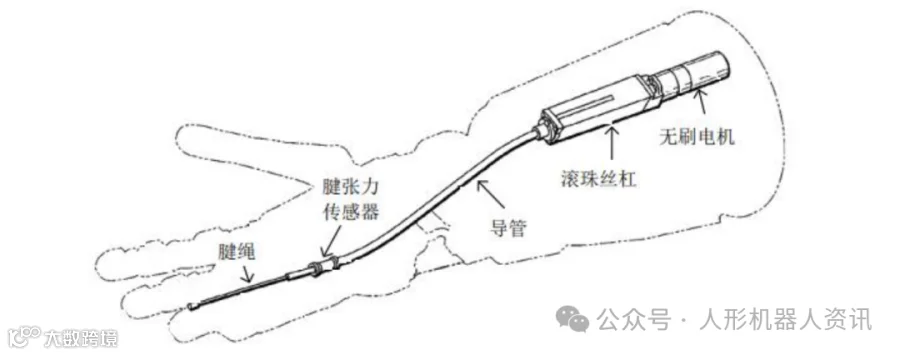
腱绳传动通过前臂电机驱动丝杠拉动腱绳,实现远距离动力传输,结构紧凑且具柔顺性,适合复杂布线。
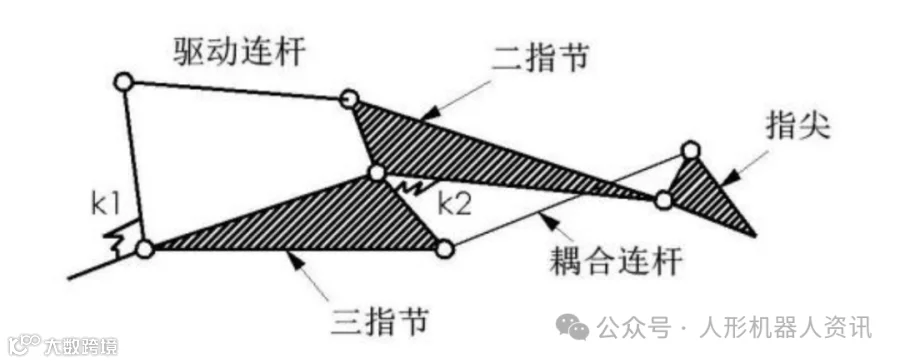
齿轮传动精度高、效率高,但体积大、重量重,常用于同步耦合关节;连杆传动结构刚性强,适用于高负载场景。
目前主流企业采用不同技术路径:特斯拉Optimus使用腱绳传动,宇树Dex5采用齿轮方案,因时机器人采用连杆传动。短期内多种传动方式将共存。

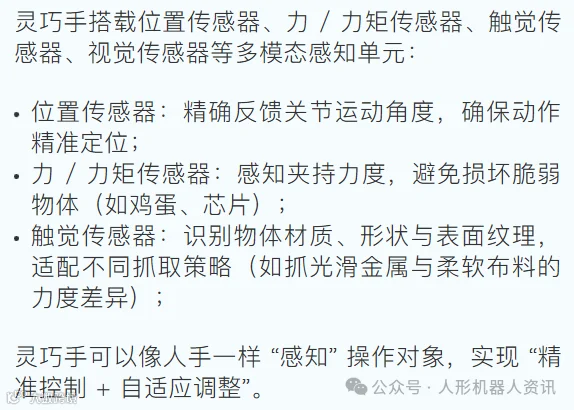
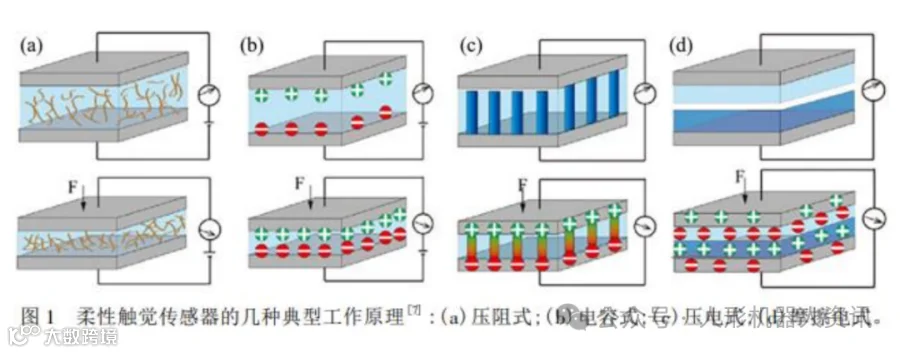
感知方式:传感器为对外交互的重要窗口
六维力传感器与柔性触觉传感器是提升感知能力的关键。内部感知包括位置、速度、加速度等参数检测;外部感知则依赖力/力矩、视觉、触觉、温度等传感器获取环境信息。
六维力传感器可同时测量三个方向的力与力矩,满足高精度操作需求。柔性触觉传感器(电子皮肤)可模拟人类皮肤感知压力、滑动、纹理等,结合纳米材料与柔性电子技术,实现高灵敏度反馈。
机器人灵巧手产业链
产业链分为上游核心零部件、中游本体制造、下游系统集成与应用三大环节,呈现“高精密制造+多学科融合”特征,价值集中于上游与中游。
上游:核心零部件
上游决定性能上限,占产业链价值60%-70%,聚焦微型化、高精度、可靠性。
a. 驱动系统:灵巧手的“肌肉”
以空心杯电机和无刷有齿槽电机为主,要求高功率密度、低噪音、快速响应。
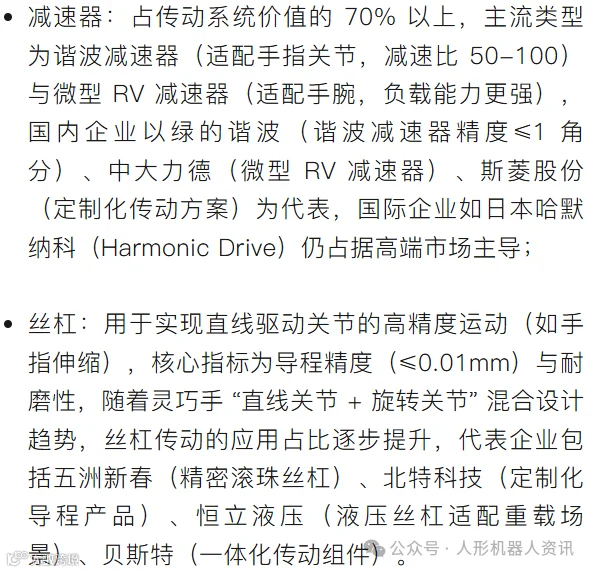
b. 传动系统:灵巧手的“关节韧带”
包括腱绳、齿轮、连杆等方案,核心指标为传动精度、回程间隙小、寿命长。
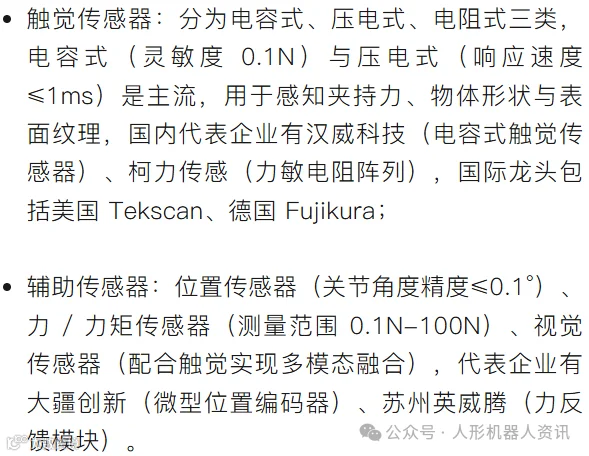
c. 传感系统:灵巧手的“触觉神经”
涵盖六维力传感器、柔性触觉传感器、IMU、编码器等,强调高灵敏度、多维感知、抗干扰。
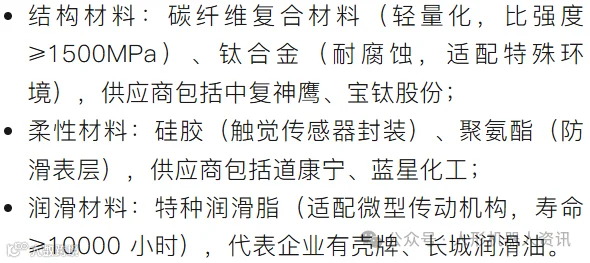
d. 功能材料:灵巧手的“骨骼与皮肤”
包括高强度工程塑料、碳纤维复合材料、硅胶、导电聚合物等,用于减轻重量、增强柔顺性与触感。
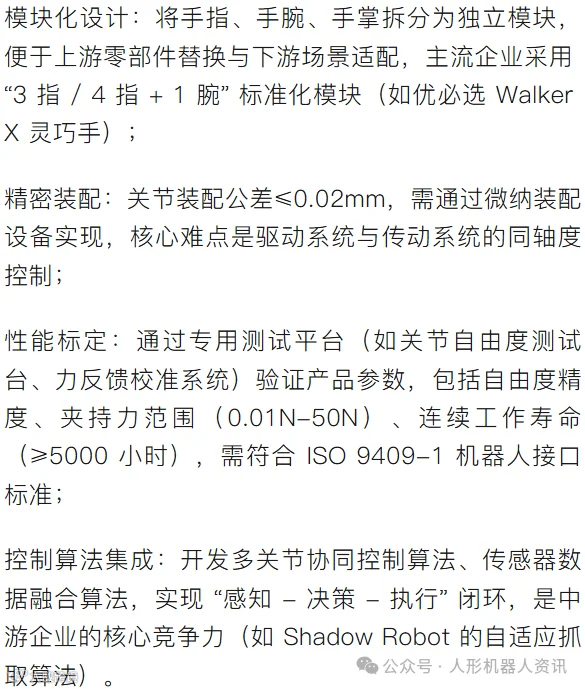
中游:灵巧手本体制造
负责将上游零部件集成成完整产品,涉及精密装配、标定与测试,技术壁垒在于多部件协同控制与工艺精度,占产业链价值20%-25%。

a. 核心流程与技术要求
包括结构设计、零部件集成、运动控制算法嵌入、性能标定与可靠性测试。
b. 代表企业与竞争格局
国际企业:英国Shadow Robot(24自由度Dexterous Hand)、美国Boston Dynamics(Spot配套灵巧手)、日本发那科(工业级方案)。
国内企业:优必选(Walker系列)、智谱AI(协作机器人灵巧手)、哈工大机器人集团(HIT DexHand)、绿的谐波(一体化解决方案)。
下游:系统集成与应用
占产业链价值10%-15%,主要面向工业制造、服务机器人、特殊作业三大场景。

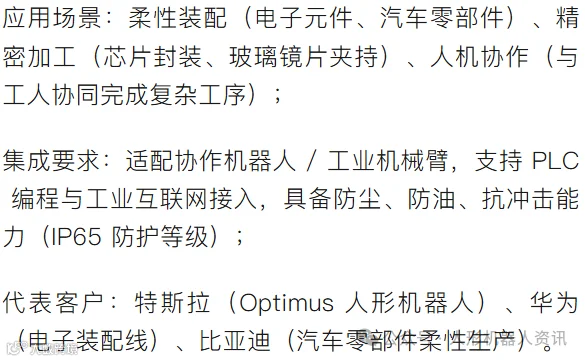
a. 工业制造(占比60%)
应用于3C电子、汽车装配、精密仪器等领域,替代人工完成高精度、重复性作业。
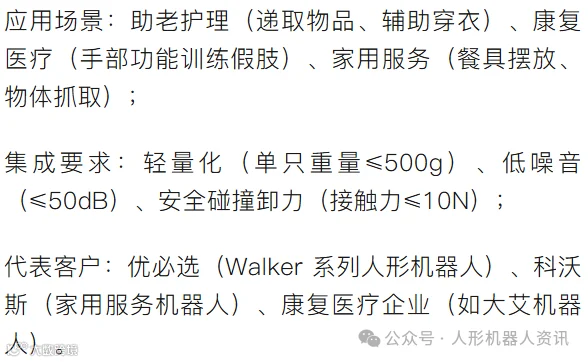
b. 服务机器人(年增速超30%)
用于家庭陪护、餐饮配送、零售导购等场景,提升人机交互体验。
c. 特殊场景(高附加值)
包括核电巡检、深海作业、医疗手术辅助等极端或高风险环境。
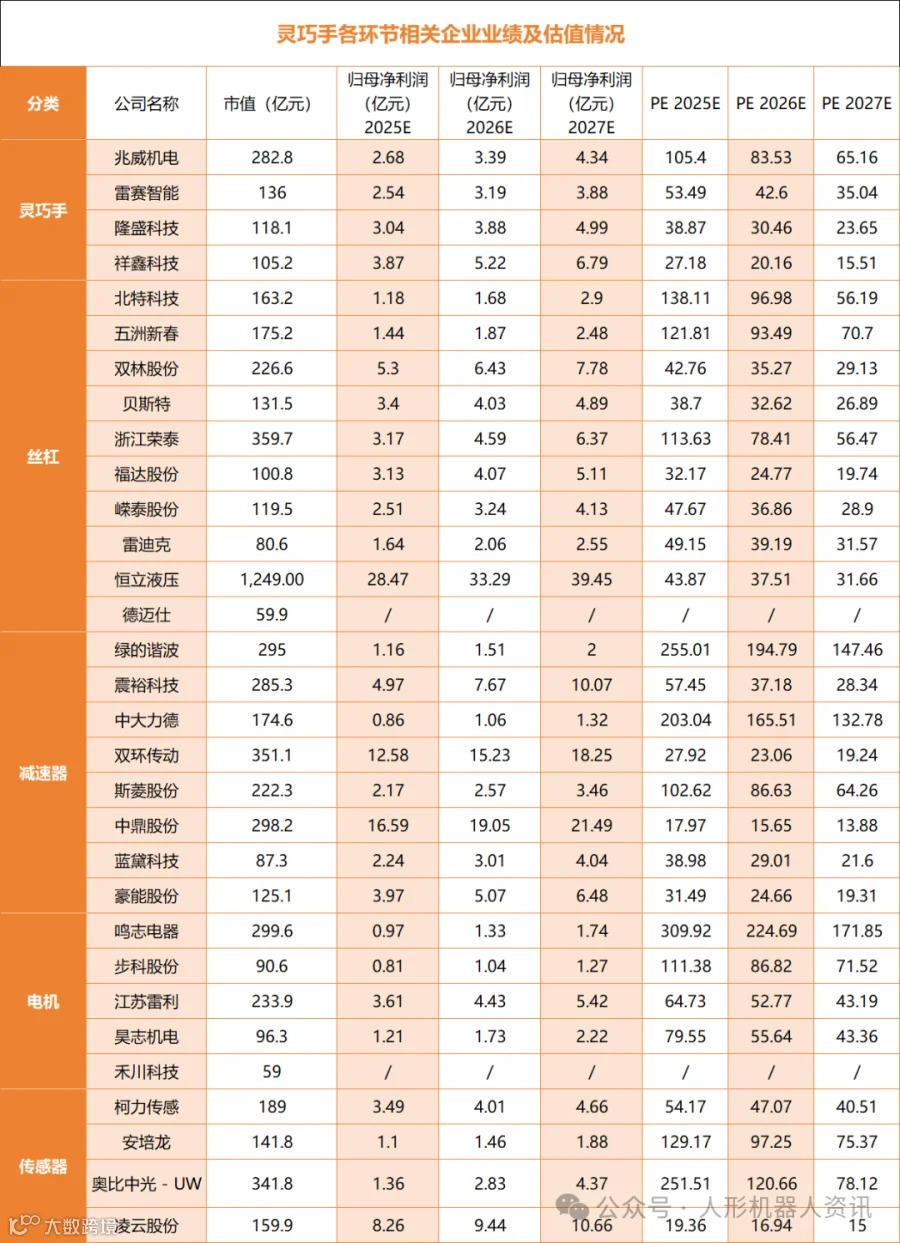
国内灵巧手企业概览
国内主要企业包括优必选、智谱AI、哈工大机器人集团、绿的谐波等,覆盖从核心零部件到整机集成的全链条布局。

随着人形机器人加速量产(如特斯拉Optimus、优必选Walker系列),灵巧手作为高价值、高壁垒核心部件,将迎来爆发式增长机遇。