
北京航空航天大学李道春教授、向锦武院士团队在《Engineering》期刊上发表了题为《Robot Pilot: A New Autonomous System Toward Flying Manned Aerial Vehicles(飞行器驾驶机器人 —— 一种面向有人飞行器的新型无人驾驶系统)》的论文,介绍了他们研发的新型直升机驾驶机器人。

该研究的核心是一种新型的机器人系统,能够独立驾驶有人直升机,从而形成一种新型的无人飞行系统。
研究团队详细讨论了飞行器驾驶机器人的概念及其优势,并提出了一种针对有人直升机的直升机驾驶机器人。该机器人根据直升机操纵机构的操控特点设计了驾驶机器人伺服机构,并基于机器人伺服机构的运动学分析,建立了直接驱动方法的机器人飞行控制器,以减少机器人伺服过程中的时间延迟和控制误差。
研究团队还构建了一个支持不同飞行模式和功能集成的地面站系统。最终,他们设计并制造了一个直升机驾驶机器人原型,并将其安装在直升机上进行了飞行测试。测试结果显示,该机器人能够独立完成前飞、后飞、侧飞和转弯飞行,验证了其有效性。

这项研究的创新之处在于,它采用了非入侵式的转换方法,使得有人飞行器可以快速、可逆地转换为无人机系统。这种方法不仅保留了原有飞行器的载荷能力和安全水平,而且避免了对原飞行器进行复杂改装的需求。此外,该驾驶机器人还可以作为副驾驶飞行员,提高现有飞行器的自动化水平,为飞行员助手、智能驾驶舱等新兴技术提供了研究平台。
在实验验证方面,研究团队在 SVH-4 轻型教练直升机上安装了驾驶机器人原型,并进行了地面测试和飞行测试。测试结果表明,驾驶机器人能够快速、准确地控制直升机的操纵机构,并在悬停、前飞、后飞、侧飞和转弯等飞行任务中表现出色。

尽管取得了显著的成果,但研究团队指出,驾驶机器人在操控过程中存在明显的姿态振荡问题。他们计划在未来的工作中进一步提高驾驶机器人的操控性能和适应性,考虑部署基于模型的现代控制方法或智能控制方法,以优化飞行性能。
来源:转载自Engneering
文章信息:Robot Pilot: A New Autonomous System toward Flying Manned Aerial Vehicles
飞行器驾驶机器人——一种面向有人飞行器的新型无人驾驶系统
作者:金子博, 李道春, 向锦武
论文链接:http://doi.org/10.1016/j.eng.2022.10.018
引用:Zibo Jin, Daochun Li, Jinwu Xiang.Robot Pilot: A New Autonomous System Toward Flying Manned Aerial Vehicles[J].Engineering,2023,27(8):242-253.
驾驶机器人系统集成
飞行器驾驶机器人依赖于多个功能子模块实现可靠的自主飞行,本节对飞行器驾驶机器人及其不同的飞行模式进行阐述,并在此基础上,提出可独立驾驶载人直升机的直升机驾驶机器人总体设计方案。飞行器驾驶机器人本质上属于机器人系统或无人系统的范畴,它集成了独立的传感器系统和伺服控制系统,可以像人类飞行员一样与驾驶舱内的电子设备和机械设备进行交互,从而与有人飞行器组合成一个新的无人飞行系统,如图1所示。一般来说,飞行器驾驶机器人的飞行驾驶可分为全自主飞行模式和有限自主/辅助飞行驾驶模式。在全自主飞行模式下,飞行器驾驶机器人可以独立驾驶有人飞行器,在对人类飞行员有危害或高风险环境中完成飞行任务。在辅助驾驶模式下,机器人系统可以与人类飞行员合作,减少机组人员数量,减轻飞行员疲劳。这两种飞行模式都需要成熟的地面站系统来支持飞行驾驶。地面站提供完整的通信链路,以实现对机器人操纵的远程监控、飞行状态感知和遥操作功能,这对实现安全可靠的飞行具有重要意义。

图1 飞行器驾驶机器人应用及其飞行模式。
本研究提出了一种直升机驾驶机器人的总体设计方案,如图2所示。直升机驾驶机器人、直升机和地面站组合成了整个无人飞行系统。驾驶机器人主要由机器人伺服机构、机器人飞行控制器、躯干支撑结构和视觉感知系统组成。机器人伺服机构末端与直升机操纵机构连接,通过内部集成的机器人飞行控制器估计飞行状态并向机器人伺服机构发出控制信号。支撑结构用于组装机器人伺服机构和其他设备。视觉感知系统主要用于捕捉和记录飞行过程中驾驶舱外的实时视景。

图2 直升机驾驶机器人系统组成。
本研究选择SVH-4轻型教练直升机作为飞行平台。SVH-4 直升机总长7.28 m,总高2.48 m。它使用Rotax912ULS柴油发动机,最大起飞质量为
通过精确测量直升机驾驶舱内空间和操纵机构空间位置,建立SVH-4直升机驾驶舱模型,如图3所示。直升机主要操纵机构包括周期变距杆(驾驶杆)、油门杆(总距杆)和方向舵踏板。驾驶杆位于驾驶舱座椅前方中央,总距杆位于飞行员座椅左侧,可绕轴承轴旋转,方向舵踏板位于仪表板两侧。通过建立直升机操纵机构末端的运动空间,获得其极限位置和运动约束。如图4所示,驾驶杆末端的运动空间在曲面内,总距杆和踏板末端的运动空间在平面内。

图3 直升机驾驶舱建模。
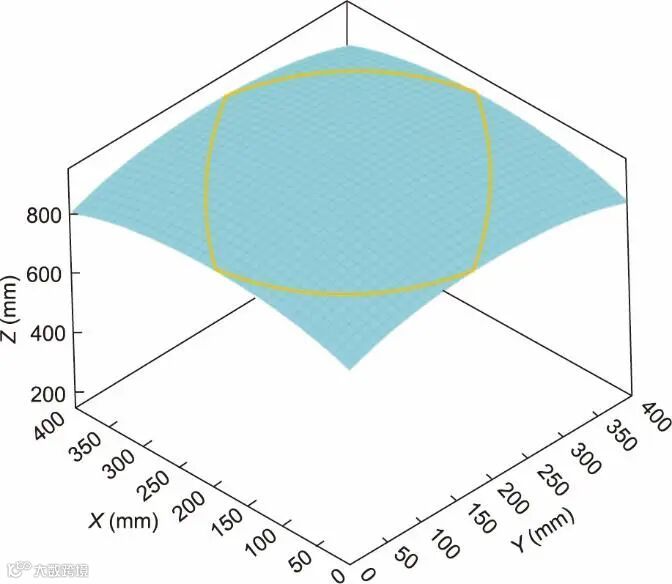
图4 驾驶杆末端运动空间。
END

