无人机航测全流程解析:从航线规划到三维建模与成图
以兰州交通大学北校区测绘实践为例,详解外业与内业操作关键步骤
无人机航测作为传统航空摄影测量的有效补充,具备机动灵活、高效快速、精度高、成本低等优势,尤其适用于小区域及地形复杂地区的高分辨率影像获取。随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已成为低空遥感的重要发展方向,广泛应用于基础测绘、土地调查、数字城市建设与应急救灾等领域[k]。
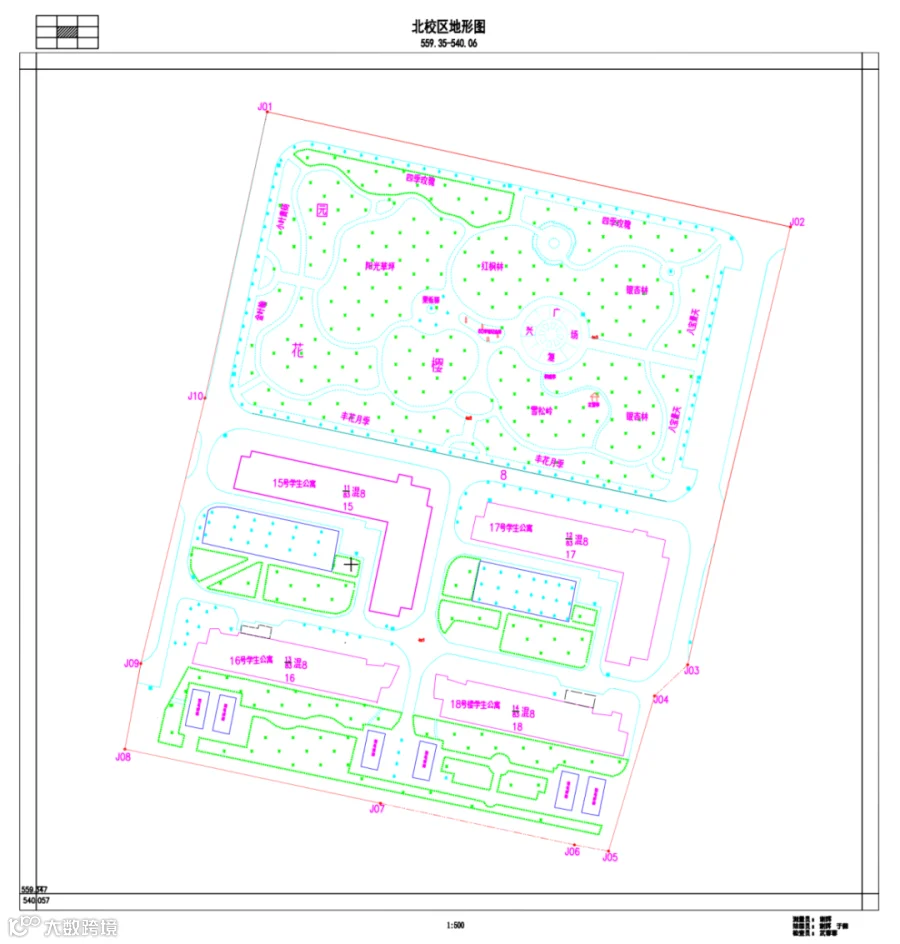
本文以“兰州交通大学北校区”为测区案例,系统梳理从外业数据采集到内业三维建模与成图的完整流程,涵盖航线规划、像控点布设、空中三角测量、三维建模及CASS线划图生成等关键环节,为测绘相关专业人员提供实践参考[k]。
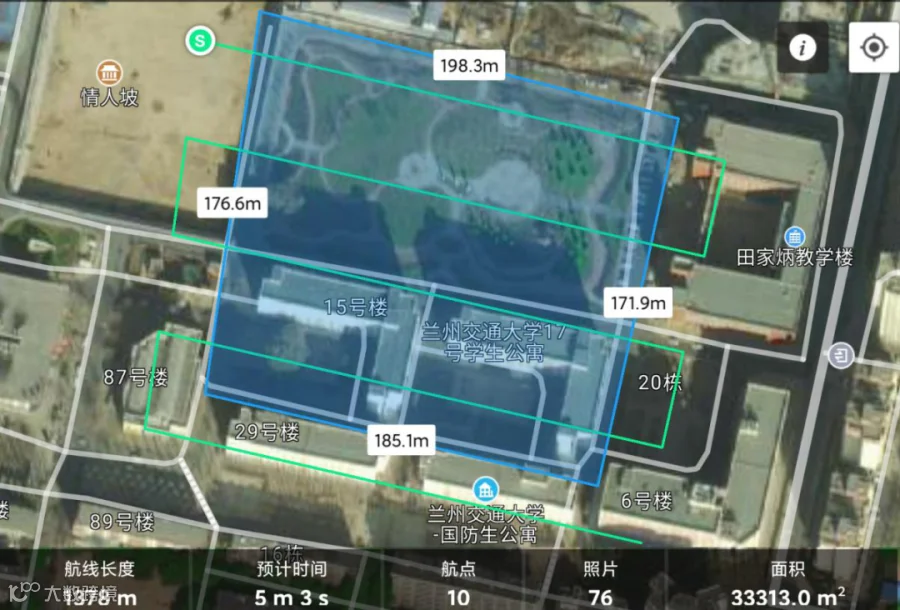
测区位于北校区和谐园,使用大疆精灵Phantom 4 RTK无人机,设定飞行高度100米,航向重叠率75%,旁向重叠率70%,完成正射影像采集,共获取有效照片77张[k]。
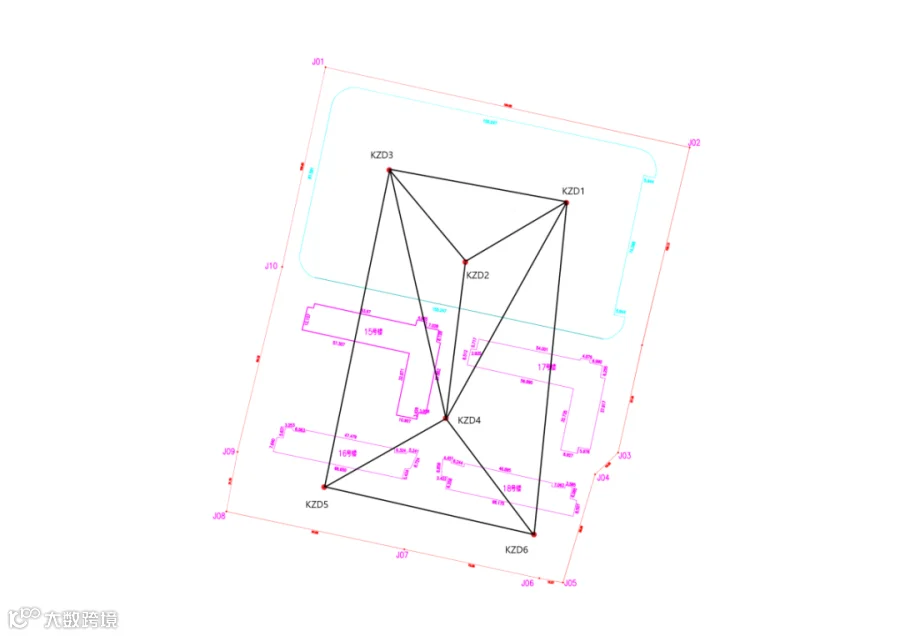
测区面积33,313平方米,航线总长1,378米,共规划10个航点。布设6个像控点,均匀分布于测区四角及中心。采用GNSS接收机进行十次平滑采集,获取CGCS2000坐标系下的精确控制点数据,用于后续影像纠正与精度控制[k]。
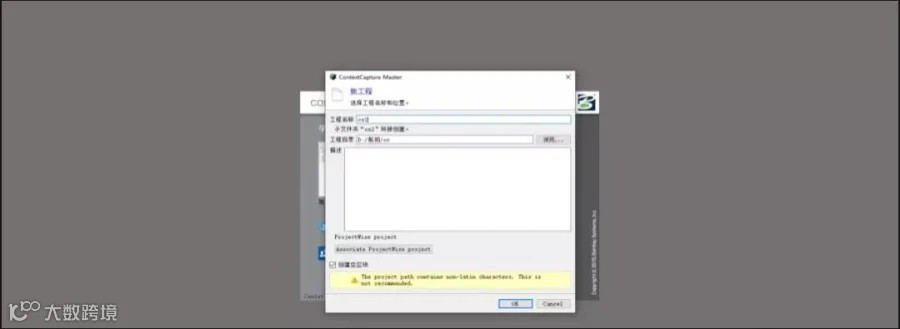
使用Context Capture软件进行三维实景建模,该软件可通过普通照片生成高精度三维模型,广泛应用于基础设施项目的全生命周期管理[k]。
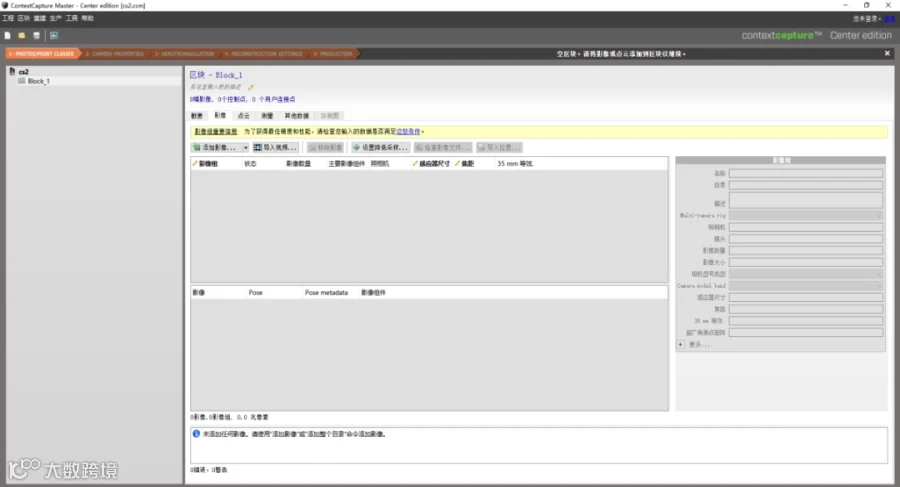
NO.1 新建工程:项目名称需使用英文字符
NO.2 添加影像
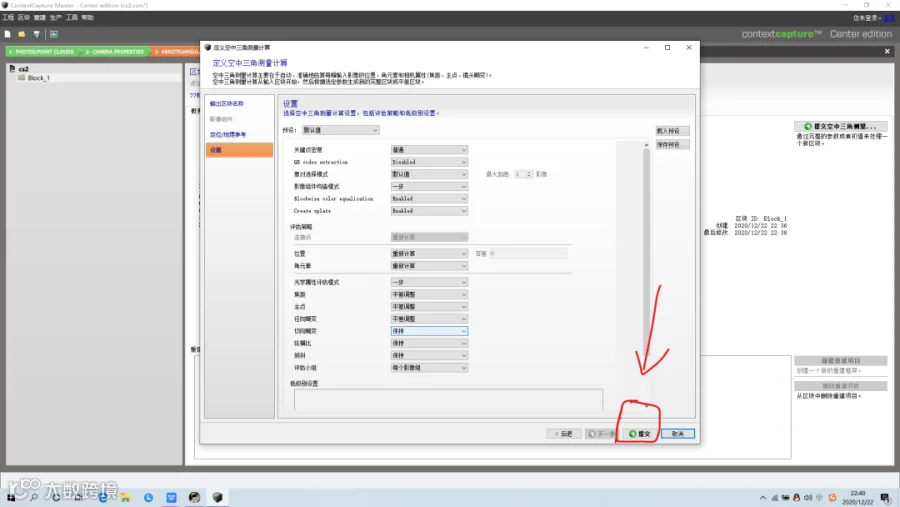
NO.3 提交空三计算
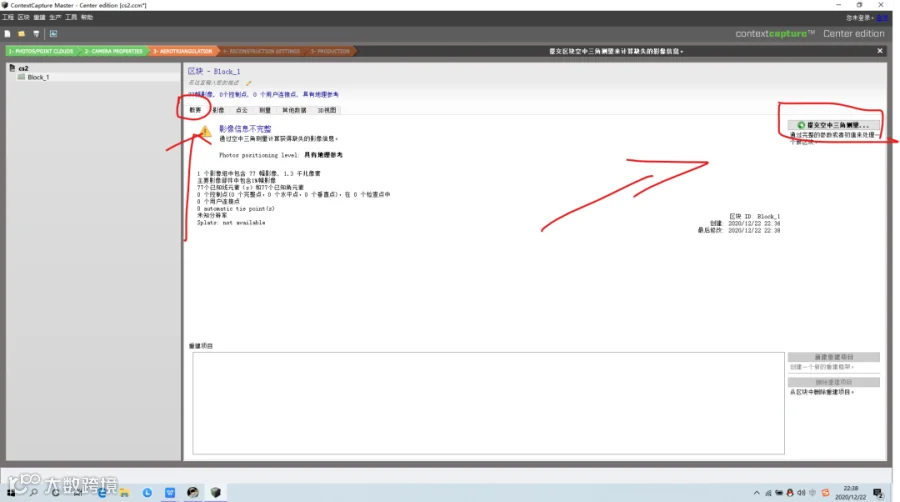
空三参数可保持默认设置,亦可根据需求调整[k]。
NO.4 空三计算完成后,添加像控点
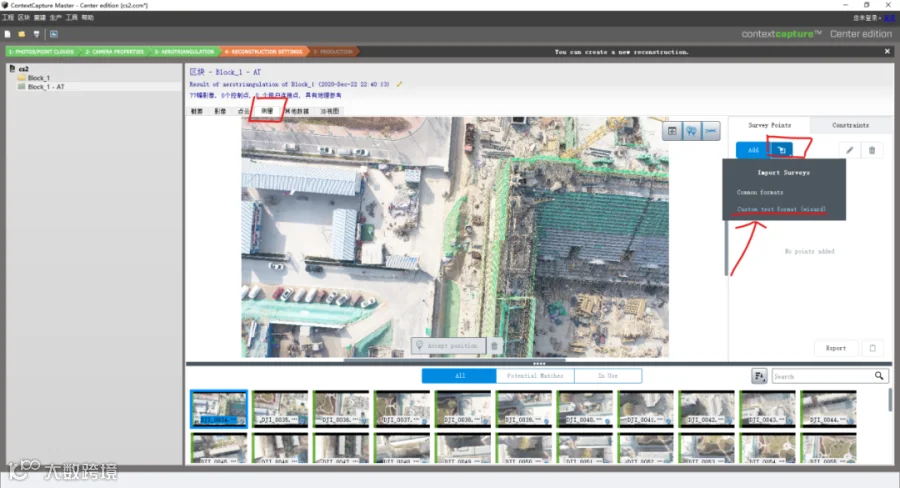
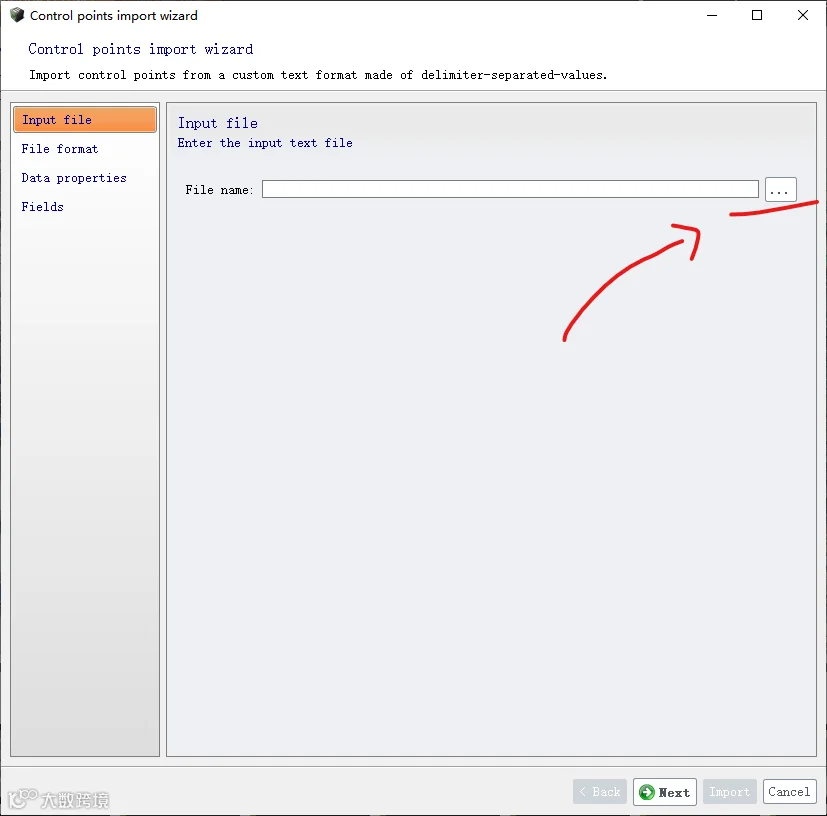
4.1 导入TXT格式的像控点坐标文件
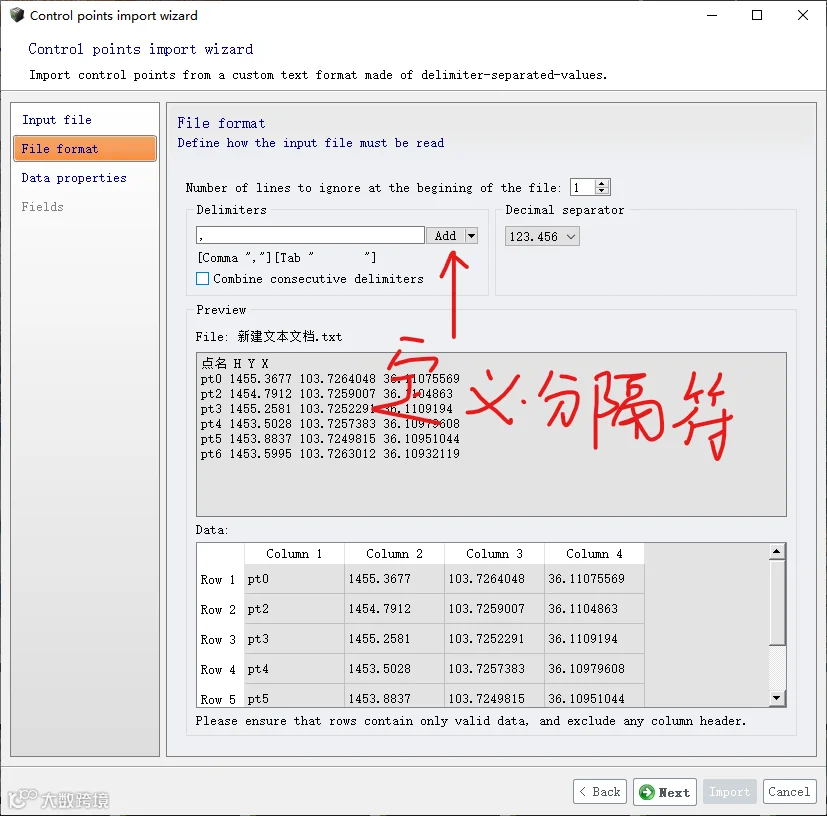
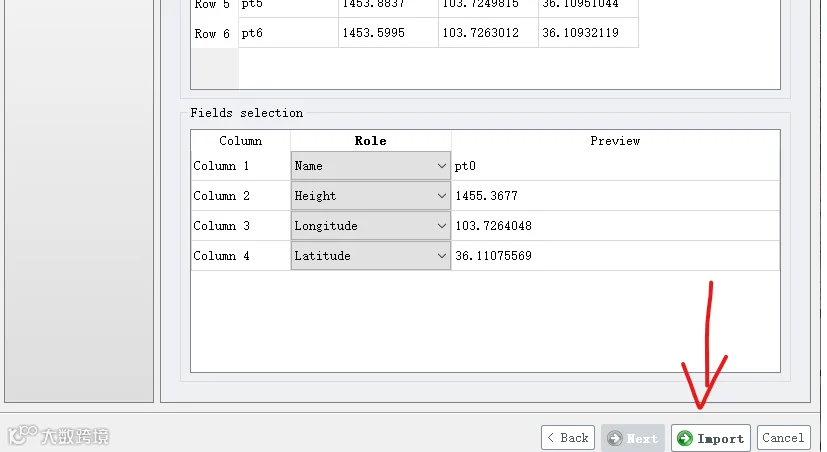
4.2 设置字段分隔符,并正确匹配坐标列
注意:根据文件头部空行数,设置“Number of lines to ignore at the beginning of the file”参数[k]。
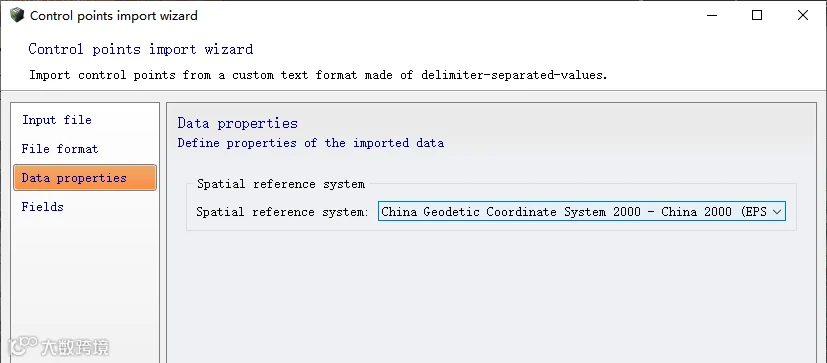
4.3 定义像控点坐标系
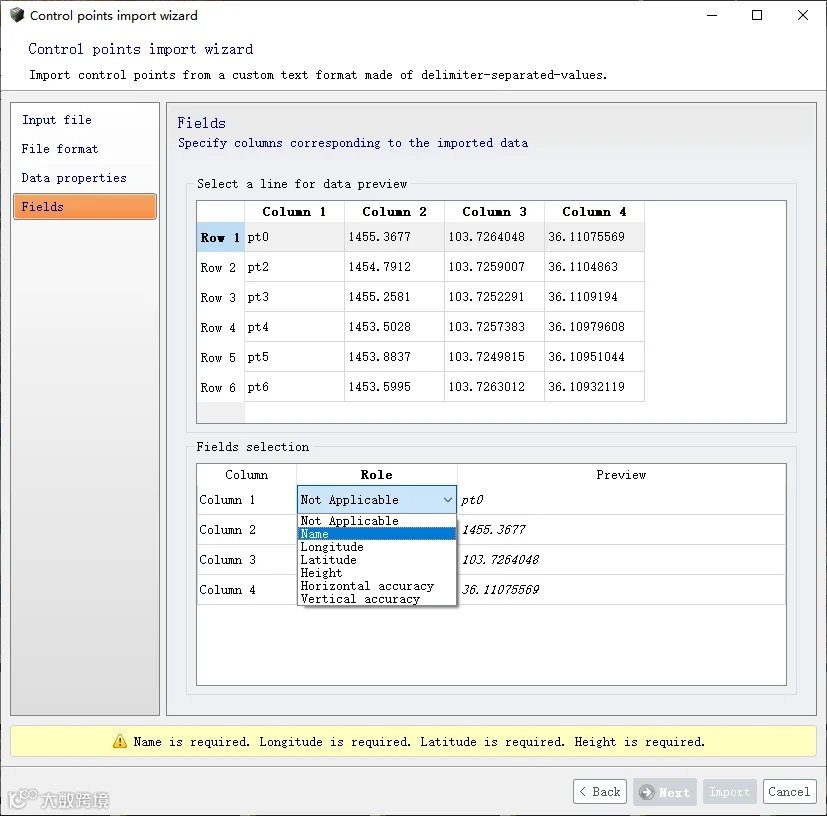
4.4 指定各列对应的坐标属性(点号、X、Y、Z)
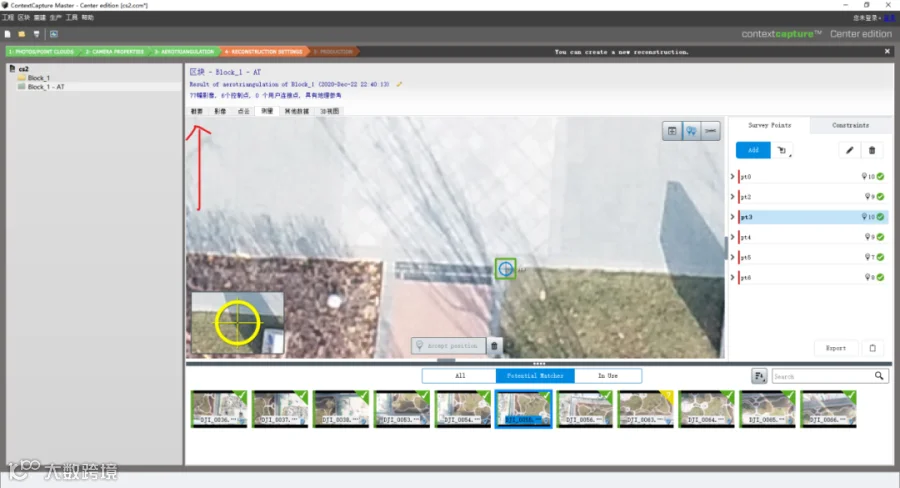
4.5 刺点操作:选择像控点并匹配对应影像中的特征点

4.6 选取清晰特征点,将黄色定位圈对准后点击“Accept position”完成刺点

4.7 每个像控点建议刺6–9个匹配点;对模糊或遮挡影像可跳过
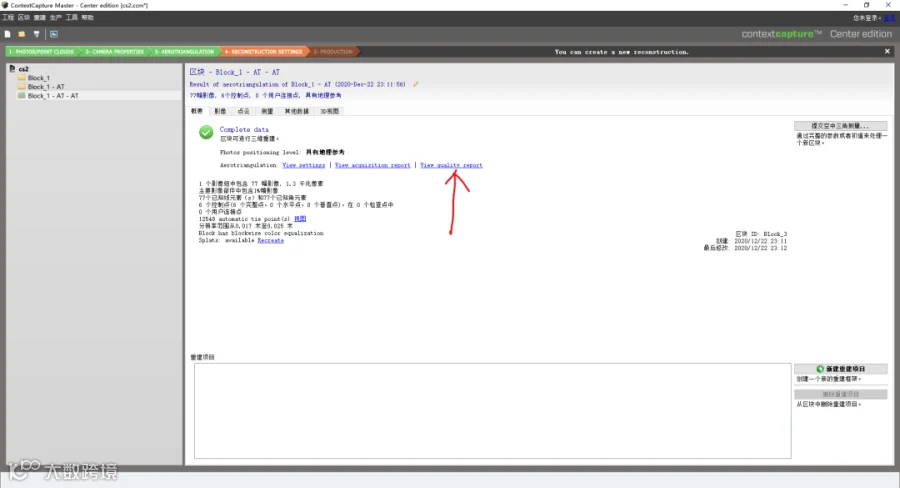
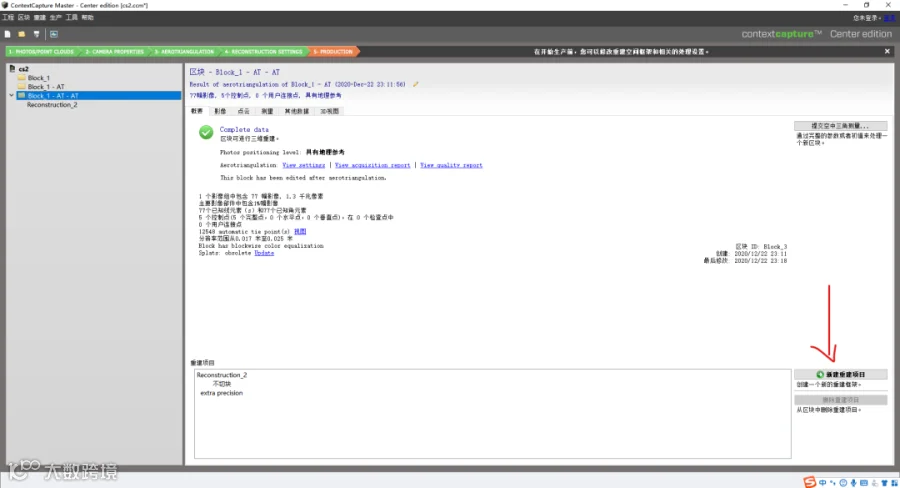
NO.5 所有像控点刺完后,重新进行空三计算,查看质量报告与点位精度
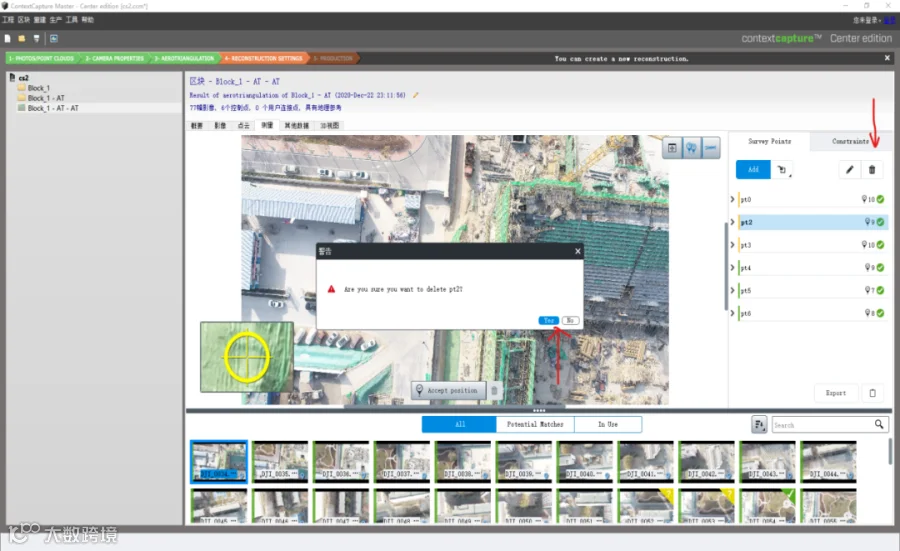
NO.6 质量评估:红色为误差超限,黄色为偏大,绿色表示在允许范围内
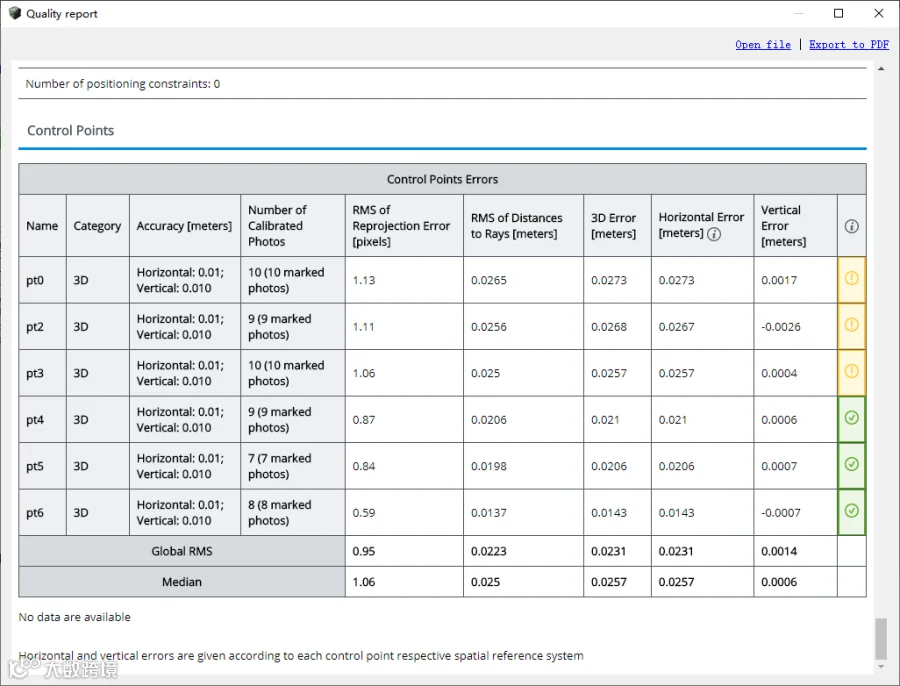
NO.7 删除误差较大的像控点以提升整体精度
NO.8 新建重建项目,生成三维产品
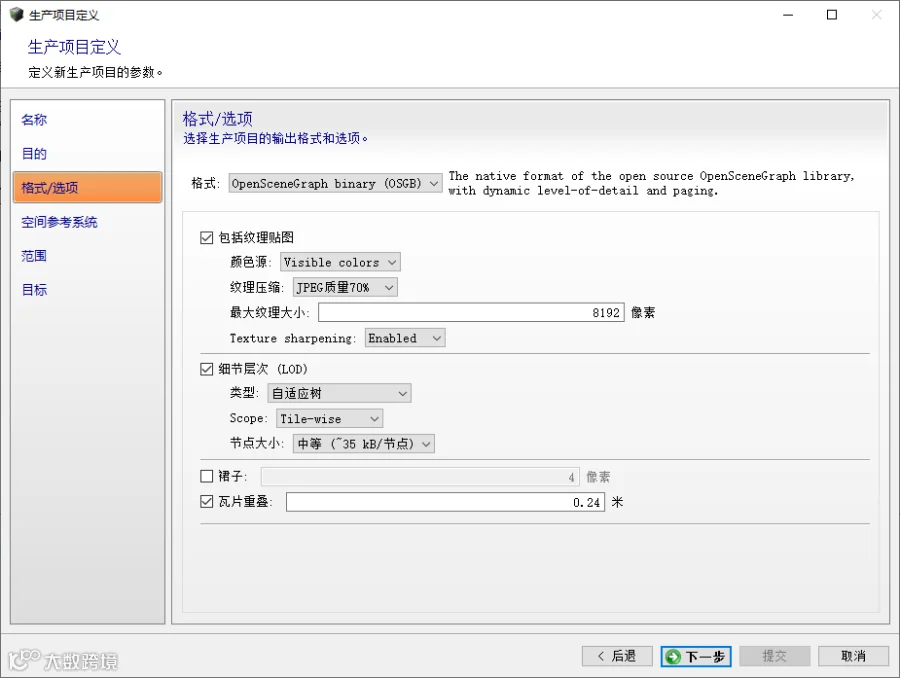
NO.9 输出格式选择OSGB,便于导入南方CASS进行测图
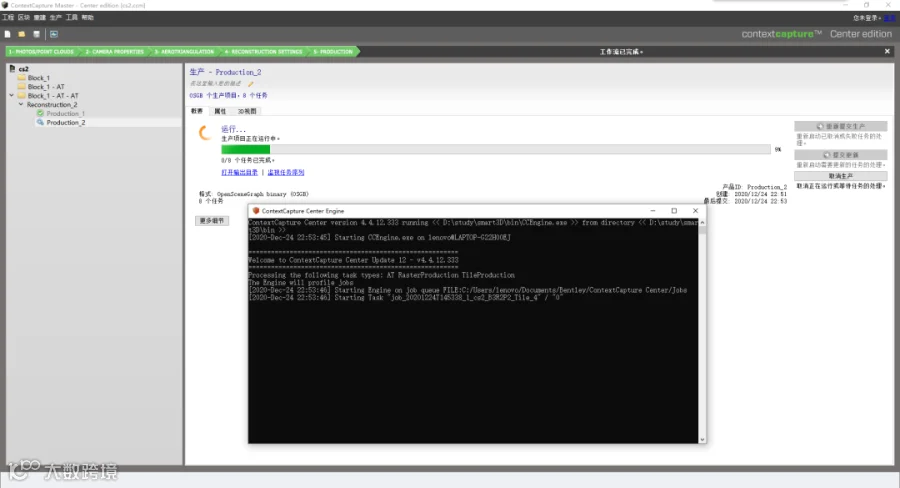
NO.10 启动任务监视器,开始三维模型生产
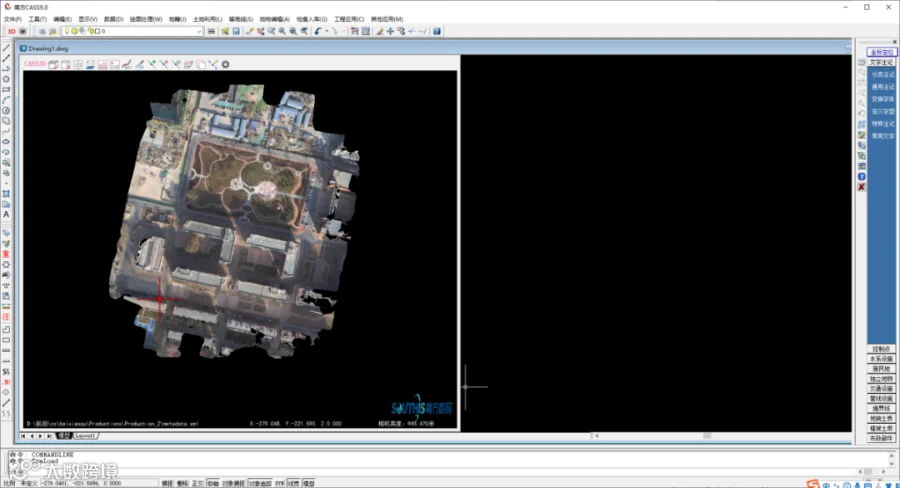
NO.1 打开南方CASS 9.0软件,进入三维模块,加载OSGB格式的三维模型
NO.2 左侧为三维模型,右侧为绘图区,两者地理坐标对应,可直接进行房屋、道路等地物要素的全要素采集
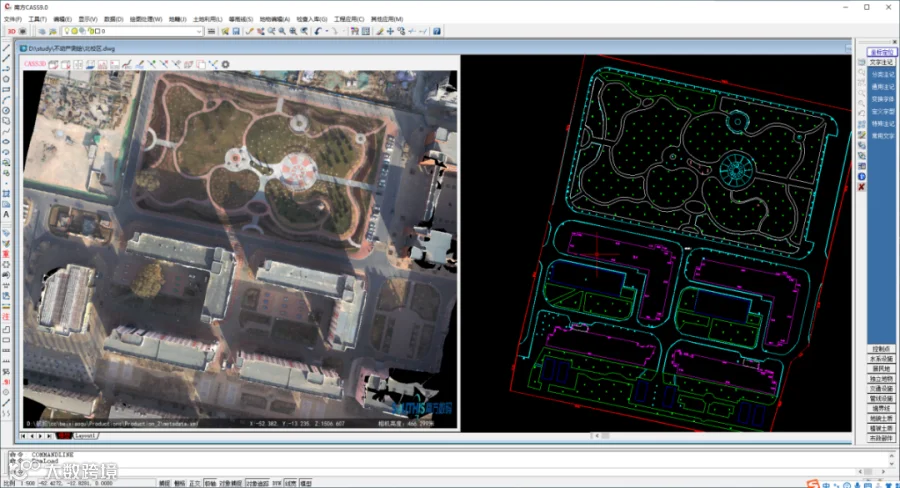
NO.3 要素采集完成后,输出DWG格式图形,用于打印与成果提交