
昨天,我们关注已久的新加坡公司 Sharpa 发布了其灵巧手产品 SharpaWave 正式量产的信息。
同步发布的还有最新的产品力视频。
发布视频的制作的极为精美。视频展示了 SharpaWave 超紧凑的结构、类人灵巧度、22个主动自由度、高精度触觉等特性以及丰富应用场景。从这一视频以及上一次 ICRA 展会的产品展示看,基本可以直接下结论,SharpaWave 是当前实力最强的灵巧手之一。
让我们来逐帧解读里面透露的关键信息:
超紧凑结构,实现类人灵巧度

从第一性原理出发,人形机器人之所以要做成人形,是因为人类社会的环境、工具和工作流程都是围绕人类身体设计的,只有具备与人类相似的身形、关节和运动能力,机器人才能无缝适配现有世界、执行人类能做的一切任务。
同理,对于灵巧手而言,手的形态就是灵巧操作操作的最优解。然而,这也带来了设计难题:如何在有限空间里实现高灵活度?
人手在约 400-800 cm³ 的有限空间里,容纳了 27 块独立的骨骼,29 个关节,约 123 条韧带及 34 条肌肉,使手成为万能工具。在有限空间内精密设计机械结构,让每个关节协同工作、提高手的灵巧度,是所有厂商面临的难题。
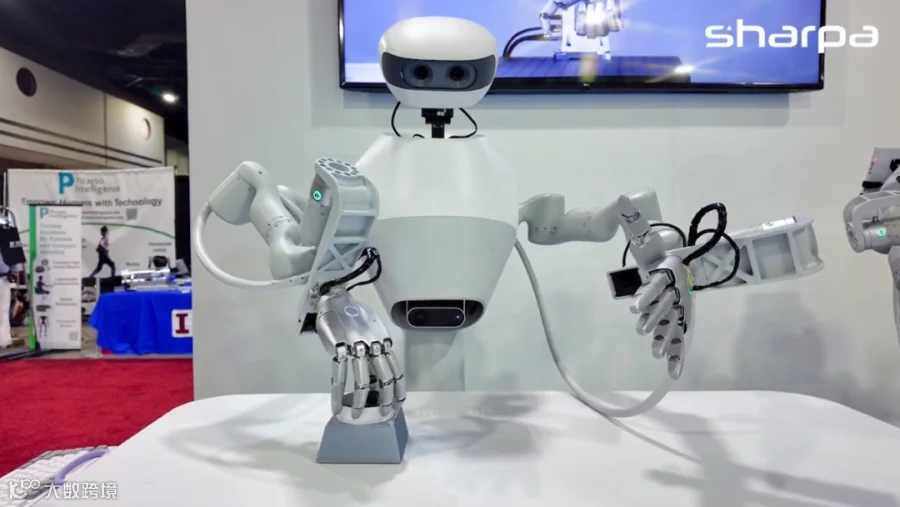
Sharpa 在视频中展示了其产品采用了人手构型,尺寸和形态与人类手掌完全一致。大量齿轮、电机、精密的机械结构被高度集成在机械手内部。
此前早有人发文称,SharpaWave 采用直驱设计路线,是 Shadow Dex Hand 生态位的绝佳替代者,还有人称 SharpaWave 22 个电机驱动,形态自由度上达到了顶级。这次视频中的内容也印证了其直驱的技术路线。
不仅如此,从视频中也可感受到 Sharpa 强大的机械制造能力。关节直驱的实现难度极高。要实现人手大小与构型,对组件有更高的要求与限制,只有将组件做的更小更极端,才有希望实现。现有的“成千上万种不同尺寸和形状的电机”很难找到完全适配的,可以猜测,其中的许多硬件或来自自研,这家公司在机械制造上已具备较强的实力。
22 个主动自由度,含 1 个向内旋转自由度

对于灵巧手来说,自由度越多,越能接近人手的运动范围和功能复杂度。
自由度中有主动自由度与被动自由度。人手约有 19~21 个主动自由度,这部分由肌肉直接控制、可以独立产生运动;还有约 5~7 个被动自由度,由韧带或组织弹性带动、不能独立控制,在外力作用下能发生小范围运动。
对应到灵巧手,主动自由度指由驱动装置直接产生驱动力或扭矩的自由度。而被动自由度不具备独立驱动装置、只能在其他主动自由度的作用下被动运动。主动自由度能够为灵巧手提供更高的灵活性。
当前市面上大部分的灵巧手产品仅有几个或十几个主动自由度。
宇树科技的五指灵巧手 Unitree Dex5-1 单手 22 个自由度,其中 16 个是主动自由度,4 个是被动自由度。智元机器人的 OmniHand Pro 专业款,仅仅具有 19 个自由度,其中 12 个是主动自由度,7 个是被动自由度。领域内的专业玩家灵心巧手官网上的 L30 直驱版,也仅达到 21 个主动自由度。

Sharpa 带着 SharpaWave 横空出世,第一款量产产品就具有 22 个主动自由度,每个关节都可独立控制。其中:有 15 个是弯曲与伸展自由度,6 个侧向移动自由度,1 个向内旋转自由度。
多数机械手的指关节只具备单方向弯曲,几乎没有横向移动,而 SharpaWave 增加了 6 个侧向自由度,允许手指在抓取中横向展开或聚拢,更有助于适配不同大小和形状的物体,实现类似人手的“包覆式抓取”与“自然张手”姿态。
手掌内旋自由度则赋予手掌扭转能力,增强了手内操作(In-hand manipulation)能力,使物体能够在手内被转动,之前在 ICRA 上,SharpaWave 通过手指、手掌的协调运动让闹钟在手中旋转,是非常精细且其他大部分厂商难以实现的动作。
在有限体积内,自由度越高,结构与控制难度越大,但要实现接近人手的灵巧操作,自由度是不可回避的技术点。
自研动态触觉阵列,实现 6,000 级压力感知

灵巧手是机器人的执行终端,而触觉是手感知外部世界,接收外部信息的终端,是灵巧手实现精细、可靠、安全操作的不可或缺的感知层。
视触觉融合将是下一代灵巧手竞争的关键。目前已有一些公司在专门在做机器人的触觉模块。
SharpaWave 配备先进的动态触觉阵列(DTA),能够实时感知物体的运动。在视频中,蝴蝶轻盈地落在指尖,触觉阵列赋予了机械手感知蝴蝶腿轻微触碰的能力。

依托自主研发的神经网络算法与传感模块,SharpaWave 实现了每个指尖超过 1,000 个触觉像素,空间分辨率小于 1 mm,压力感知范围 0–30 N(灵敏度0.005 N),约 6,000 级压力感知,并且能够提供六维力信息。
同样以国内头部的厂商宇树科技与智元机器人做对比,宇树科技 Dex5-1P 感知范围在 10 g-2500 g,换算下来大概在 0.1 N–24.5 N区间。智元机器人 OmniHand Pro 专业款仅提供三维力,150+ 触觉点位。
科研界呼吁具有触觉反馈的灵巧手。在灵巧操作中,触觉信号是控制反馈的核心。高精度触觉可收集更多环境信息,帮助手感知物体的状态,如压力、温度、质地等,使控制系统快速反馈,提升柔性、稳定性和精细操作能力。而在数据采集场景下,触觉亦至关重要。当缺乏触觉反馈,操作者只能依赖视觉判断,操作物体如“抓空气”,效率与精度大幅下降。因此,越来越多遥操作方案开始重视触觉回馈。
高度优雅的工业设计,兼顾力量与优雅
SharpaWave 的工业设计达到了灵巧手的极致。不仅整体尺寸接近人手大小,而且在手指、手掌、手的长度、手的宽度等关节比例上,与人手高度同构,使其在视觉上呈现出自然协调。
设计语言采用极简风格,去除冗余结构,色彩选择低调而温润,金属与哑光材质结合,既凸显科技感,又带来亲和力。复杂的机械结构被巧妙隐藏于光滑轮廓下,既保留工业精密感,又具有人性化视觉体验。

功能演示与应用场景
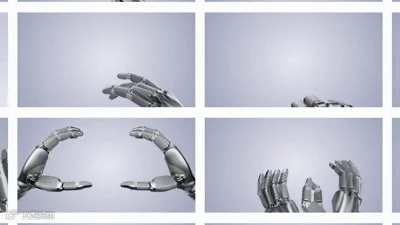
视频中还有一段画面,展示了 SharpaWave 丰富的操作能力与应用潜力,既能做出“比心”、“OK”等手势,还能拿起国际象棋、笔、勺子、锤子、相机等日常物品。
在官网,Sharpa 还展示了多物体抓取、剪刀使用、单指尖提可乐和每秒 4 次快速张合双手的 demo。
此前还有研究者用 SharpaWave 灵巧手进行 2.5 分钟的连续、自主控制,完成做汉堡任务。
SharpaWave 瞄准的是所有人类动作以及所有人类工具,或许未来,我们能够在更多日常生活、工作、乃至艺术表达看到 SharpaWave 的应用。
相约 IROS 2025
人形机器人的下半场看灵巧手。手能干活,机器人才能真正“上岗”。王兴兴曾提到宇树一直非常重视机器人包括灵巧手,公司最多的人在做让机器人干活的事。特斯拉 Optimus 的量产也被卡在了灵巧手的设计上。
Sharpa 瞄准行业最核心的痛点和瓶颈,成立不到一年,就推出了完成度极高,且具有破解灵巧操作硬件难题潜质的产品,其后续的产品路线规划值得期待。
10 月 21 号,Sharpa 将来到杭州 IROS 2025,进行中国首秀,并且还有一个Keynote Section,讲解如何从“手”解锁物理智能。
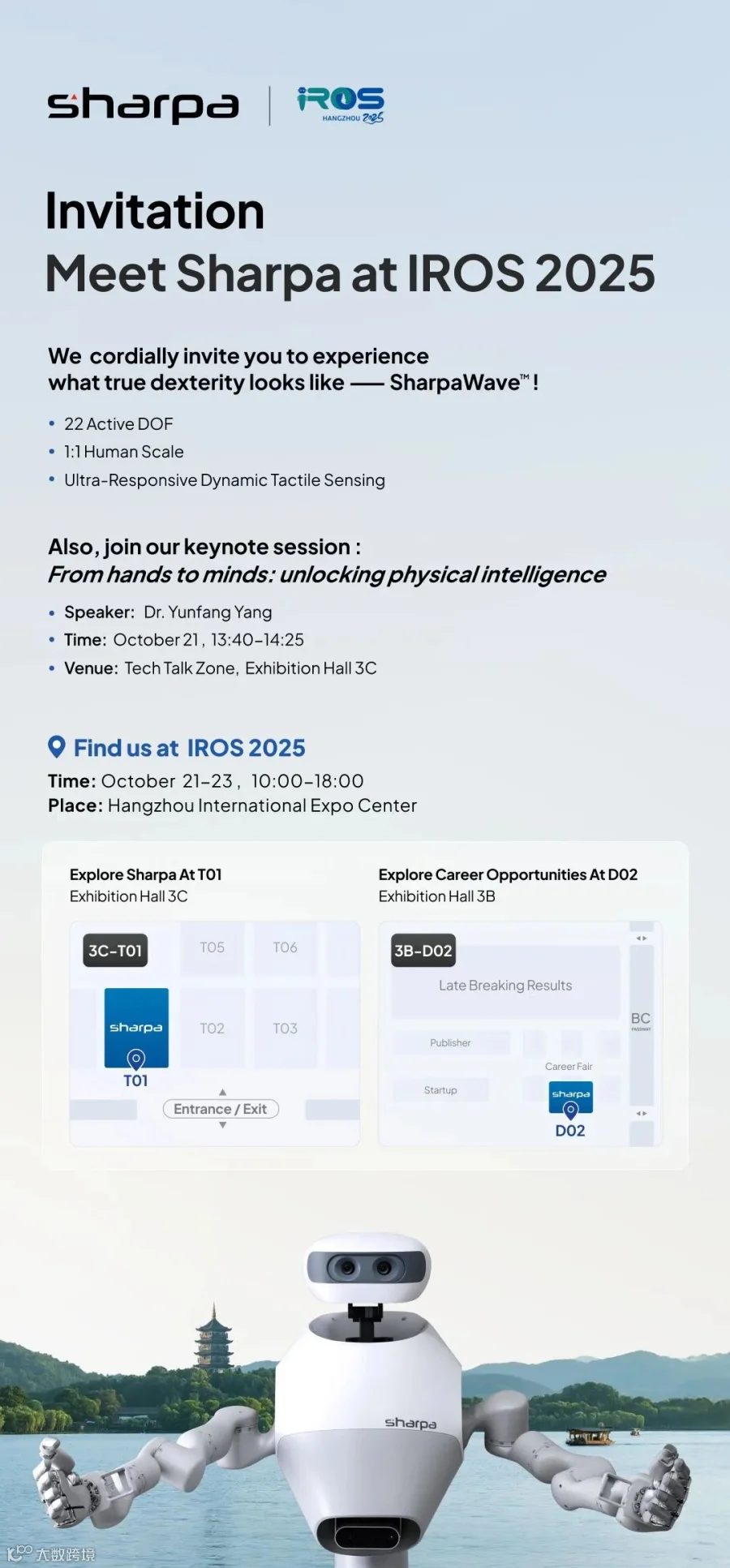
上一次 Sharpa 公开亮相还是在 5 月的 ICRA,现场 demo 比较典型的,有视觉遥操作、机器人发牌玩 21 点、AI 驱动拍照等 demo,主打的是连贯动作,灵巧度令人印象深刻。我们此前关注过,Sharpa在IROS上拿到了最大展台。这次我们也将亲赴现场,近距离感受这款顶尖灵巧手的魅力。
欢迎扫描下方二维码或者在后台发送“入群”,加入我们的「Bot情报局」。这里聚集了关注机器人的从业者、研究者和爱好者,我们将在群里更新 IROS 2025 见闻。
