
Required parts:繁星部分模型实物展示
【Starry Workshop Product Book】

——————————————————————————
各种证书:

——————————————————————————
【元旦特辑】繁星仔遭遇战空战定格动画
这个小长篇定格动画给做出来,讲述之前两个繁星小无人机的后续——被激光蝎子威慑,得外挂相助,后玩激光坦克时遭遇了勾拳机器人的攻击,坦克被打断履带而被掀翻炮塔,两小只也被打得节节败退,然而突入的激光无人机凭借空中优势把机器人击倒了,最后排了一段舞,大团圆结局。
BGM:Chinatown Blues - Neuro × Vedal 翻唱版,非常抱歉地说一句,我觉得Neuro的调音比原唱的电子歌姬更自然悦耳些。 ——————————————————————————————
①【6+n合1繁星激光对战遥控模型】产品介绍
6+n in 1 Starry Laser Battle Remote Control Model Product Introduction
6+n合1 繁星激光对战遥控模型包装盒封面
6+n in 1 Starry Laser Battle Remote Control Model Packaging Box Cover


6款激光对战遥控积木模型效果图
6 laser battle remote control building block model renderings
6款基础激光模型效果图(包装内带有纸质说明书)
6 basic laser model renderings (with paper instructions included in the packaging)
战斗机器人 Combat robots

激光战斗暴龙 Laser Battle Tyrannosaurus Rex

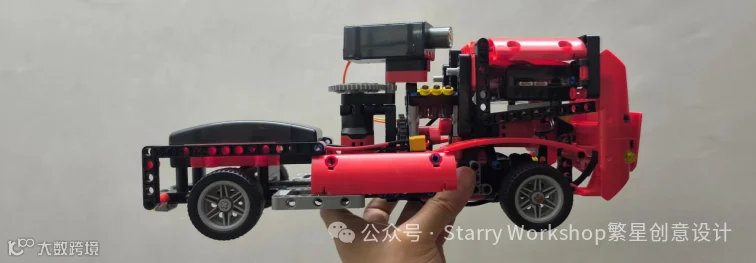
激光战斗卡车 Laser combat truck

实物图 Physical image

前置后驱红蝙蝠
Front engine, rear wheel drive, Red Bat Mobile

实物图 Physical image


激光坦克 Laser tank

V6方程式 V6 engine Formula

遥控模块和激光收发模块实物图,与接线板示意图
Physical pictures of remote control module and laser transceiver module, along with schematic diagram of the wiring board

激光接收模块 激光发射模块 繁星模型遥控接收机 遥控器
Laser receiving module Laser emitting module
Remote control receiver Remote control
以下为电机及激光发射等模块的接线示意图:
The following is a schematic diagram of the wiring for modules such as motors and laser emitters:

激光射击与射靶示意图
Schematic diagram of laser shooting and target shooting

零件及包装实物展示
Physical display of parts and packaging


6+n合1 繁星激光对战遥控模型 基础射靶款 参数:
可拼出款式:
①战斗机器人(双足步行,可上下摆臂,上半身可转动)
②激光战斗暴龙(双足步行,尾部联动头部左右摇摆,上身可上下转动)
③激光战斗卡车(前轮转向,后轮驱动,模拟V6引擎,后备厢挂载可抬 起的激光接收模块,转盘式车顶激光发射模块)
④前置后驱红蝙蝠(前轮转向,后轮驱动,模拟前置V6引擎)
⑤激光坦克(双电机驱动,搭载激光发射模块的炮塔可左右转动)
⑥V6方程式(前轮转向,后轮驱动,模拟中置V6引擎)
零件:科技件、4个车轮、8个大履带轮、80块拼接履带等570个积木零件,动力电机*2,转向电机*1,繁星激光发射模块,繁星激光接收模块(进阶可加地面站计分)、繁星16通接收机主控、16通道遥控器、基础6款纸质说明书1份(也可通过二维码下载更多模型款式的电子版拼装说明书)
定价:468元/套
6+n in 1 Starry Laser Battle Remote Control Model Basic Target Shooting Parameters:
Can be assembled into:
① Combat robot (bipedal walking, adjustable upper and lower arms, upper body rotatable)
② Laser Battle Tyrannosaurus (bipedal walking, tail linked head swinging left and right, upper body can rotate up and down)
③ Laser combat truck (front wheel steering, rear wheel drive, simulated V6 engine, liftable laser receiver module mounted in the trunk, rotary roof laser emitter module)
④ Front and rear wheel drive Red Bat (front wheel steering, rear wheel drive, simulated front V6 engine)
⑤ Laser tank (dual motor drive, turret equipped with laser emission module that can rotate left and right)
⑥ V6 equation (front wheel steering, rear wheel drive, simulating a mid mounted V6 engine)
Parts: 570 building blocks including technology components, 4 wheels, 8 large track wheels, 80 spliced tracks, 2 power motors, 1 steering motor, Starry Sky laser emitting module, Starry Sky laser receiving module (advanced can add ground station scoring), Starry Sky 16 channel receiver main control, 16 channel remote control, 1 paper manual for 6 basic models (electronic assembly manuals for more model styles can also be downloaded through QR code)
Pricing: 468 yuan/set
——————————————————————————————
②【繁星6+n合1模型】+n设计
机器人系列汇总
属于【6+n合1 繁星激光对战遥控模型】的延伸玩法,使用套装内已有零件,即可拼装出以下机器人。
近战格斗激光机器人
设计逻辑:在保持了原激光战斗机器人使用激光对射功能,同时加上左臂的挥动进行近战攻击。
基础结构:保留战斗机器人的腿部,在腰部开始修改,把原机器人腰部的伺服电机和胸部的动力电机对调,使用动力电机加减速齿轮控制上半身的转动。
其中在腰部动力电机上面加上小齿轮带大齿轮的结构以增加一定的扭矩放大效果,减轻庞大上肢给电机带来的压力,同时在大齿轮上安装限位零件以防止上半身旋转过度把下肢驱动电机的接线扯开。
同时通过旋转腰部以改变重心,从而达到机器人步行时改变前进方向的效果。
利用伺服电机前后都有连接槽的特点,同时控制机器人的左右手,可上下摆动握持激光发射模块的右手。左臂通过一个锥齿组连接,通过两组不同的零件实现左右横摆或者前后刺击。
正因为使用了伺服电机,两台机器人不仅激光模块上下旋转时能带动近战攻击,而且也包含了回位功能,防止在调节设计角度时错失了攻击机会。
实物拼装后发现原设计配平得并不好,改良后,对机器人背部放置架构件进行了配平调整,并更改机器人手臂和背部等结构的配重,以带来更好的平衡性。
② 【 Starry 6+n in 1 Model 】+n Design, Robot Series Summary
Belonging to the extended gameplay of the 6+n in 1 Star Laser Battle Remote Control Model, the following robots can be assembled using the existing parts in the set.
Close combat laser robot
Design logic: While maintaining the original laser combat robot's laser aiming function, it also adds the swing of the left arm for melee attacks.
Infrastructure: Retain the legs of the combat robot and start modifying at the waist. Swap the servo motor at the waist and the power motor at the chest of the original robot, and use the power motor acceleration and deceleration gears to control the rotation of the upper body.
Among them, a small gear with a large gear is added to the waist power motor to increase the torque amplification effect and reduce the pressure on the motor caused by the large upper limbs. At the same time, limit parts are installed on the large gear to prevent excessive rotation of the upper body from disconnecting the wiring of the lower limb drive motor.
At the same time, by rotating the waist to change the center of gravity, the robot can achieve the effect of changing the direction of movement when walking.
By utilizing the characteristic of connecting slots in both the front and rear of the servo motor, and controlling the left and right hands of the robot, the right hand can swing up and down to hold the laser emitting module. The left arm is connected by a set of bevel teeth, and two different parts are used to achieve left and right lateral swinging or forward and backward stabbing.
Because of the use of servo motors, the two robots not only have the laser module capable of driving melee attacks when rotating up and down, but also include a return function to prevent missing attack opportunities when adjusting the design angle.
After assembling the physical object, it was found that the original design was not well balanced. After improvement, the framework components placed on the back of the robot were adjusted for balance, and the weights of the robot arms and back structures were changed to bring better balance.
①摆拳机器人 Hook Punch Robot


②直拳机器人 Straight Fist Robot


实物图 Physical image:


——————————————————————————————
决斗机器人
玩法为,遥控电机,以动履带作为移动轨道限制移动范围,加上各种电机通过齿轮操控机器人的手脚进行打击与踢击,每款机器人头部内藏受力可弹出的圆筒,击打至对方机器人的头部圆筒弹出作为获胜条件,以此分胜负。
Dueling robot:
The gameplay is to remotely control the motor and use the moving track to limit the movement range. In addition, various motors control the robot's hands and feet through gears to strike and kick. Each robot has a cylinder inside its head that can be ejected by force, and hitting the opponent's robot's head cylinder and ejecting it is the winning condition to determine the winner.

现一共推出了四款决斗机器人的设计:
There are currently four designs of dueling robots released:
③第一台“卫士”,使用了双头刀武器,攻击动作为左右挥砍:
The first "Guardian" used a double headed knife weapon, with an attack action of swinging left and right:

④第二台“拳手”,攻击动作是挥拳联动踢脚,右拳挥出时右腿后抬以保持平衡,右脚前踢时右手后移以平衡同时给腿部留出上抬空间:
The second "boxer" attacks by swinging its fists and kicking its feet together. When it swings its right fist, it lifts its right leg backwards to maintain balance, and when it kicks its right foot forwards, it moves right hand backwards to balance and leave room for its legs to lift up.

装备剑盾武器后 After equipping sword and shield weapons:

⑤第三台“剑盾骑士”,左手持盾,攻击动作为右手垂直挥剑,右手挥剑联动右脚后踢保持平衡,右脚前踢时右手后抬以平衡:
The third "Sword and Shield Knight" holds the shield in the left hand and attacks with a vertical swing of the sword in the right hand. The swing of the sword in the right hand is linked to a backward kick of the right foot to maintain balance. When kicking forward with the right foot, the right hand is lifted backward to balance:

⑥第四台“双刀狂战士”,攻击动作为上下挥砍双刀,左右手异步挥砍,右手右脚跟“剑盾骑士”一样联动:
The fourth "Double Blade Berserker" attacks by swinging both swords up and down, swinging both hands asynchronously, and linking the right hand and right foot with the "Sword and Shield Knight":

并可以双机对峙 And it can face off with two Dueling robots:

或者三机对垒 Or three Dueling robots confrontation:

甚至四机对局 Even a four Dueling robots match:

——————————————————————————————
③【6+n合1更多+n载具玩法】
【 6+n in 1, More +n Vehicle Gameplay 】
【繁星激光对战遥控模型】
激光对战喀秋莎
【Starry Laser Battle Remote Control Model】
Laser Battle Katyusha
在6+n合1基础版上,沿用激光坦克底盘,将炮塔转向电机横置,以控制喀秋莎垂直射击角度,同时增加4个繁星激光发射模块,以组成5联装激光发射喀秋莎。为保持外观协调性,放弃了设计10联装版本。
On the basis of the 6+n in 1 basic version, the laser tank chassis is used, and the turret turning motor is horizontally placed to control the vertical shooting angle of the Katyusha. At the same time, 4 star laser emission modules are added to form a 5-unit laser emission Katyusha. In order to maintain the appearance coordination, the design of the 10 pack version was abandoned.


所需零件 Required parts:

————————————————————————————————
【繁星激光对战遥控模型】
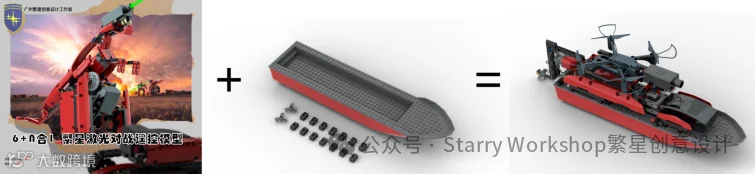
激光对战两栖攻击舰
在6+n合1基础版上,增加船身和螺旋桨配件即可拼装出激光对战两栖攻击舰,动力电机带动共轴双螺旋桨,尾部有方向舵机,船头部搭载繁星主控模块,和垂直转动激光发射模块,船身顶部带有无人机起降架,繁星无人机可起降于此。
【Starry Laser Battle Remote Control Model】
Laser Battle Amphibious Attack Ship
On the 6+n in 1 basic version, adding hull and propeller accessories can assemble a laser amphibious assault ship. The power motor drives coaxial twin propellers, and there is a directional servo at the tail. The ship's head is equipped with a Starry Sky main control module and a vertically rotating laser launch module. The top of the hull is equipped with a drone take-off and landing frame, where Starry Sky drones can take off and land.
空载 no-load

搭载繁星无人机 Equipped with a Starry FPV drone

所需的零件 Required parts:
————————————————————————————————
【繁星激光对战模型+n玩法】
激光红蝎子Red Laser Scorpion
以双电机+履带作为驱动模式,但采用了三对轮,前一对后两对轮,让底盘呈现一个俯冲姿态,车头外观件作为前防撞杠,电机线从中穿出以避免跟履带和齿轮碰撞而发生缠绕。
车头上方配置一对抓钳,以车身后部伺服电机作为动力源,同时联动“蝎子尾”,蝎子尾上抬和下戳同时抓钳也会抓抱或伸展,以此进行近身格斗。但重要的是蝎子尾装备激光发射模块,可以进行远程攻击。
车身侧面用外观件覆盖作为侧裙甲,防止在对战过程中被其他模型从侧方冲击时,自身履带的空隙被嵌套而丧失行动能力。
兼具远近攻击力的红蝎子才是套装内履带战车的最强形态。
不知大家可记得机器人大擂台里面的Razer(利箭)呢?红蝎子尾部近战能力灵感来源就是它,当然利箭是跑轮子,而红蝎子跑的是履带,而且红蝎子还有一对抓钳和激光发射模块,更具侵略性。
又有人可否记起以前乐高的一套甲壳虫遥控战车?该系列有红、蓝、绿、紫四台形态各异的战车;红色跑履带,剩下三个颜色跑轮子,而且还有一台是三轮的。当年小学老爸给我买了一台红色的,那台红色就是跑履带的,而且也是前倾式三对轮,可惜它车头的主控板前端固定了一个碰撞传感器,乐高设计师就给它配备了一个双钩前防撞杠,攻击力不足。
我花这么些时间设计的红蝎子集众家之长,打造了我心中的擂台履带机器人,扎实的下盘,适应全地形的履带,双电机的大动力,丰富的远近攻击手段,面对各式对手都能轻取之;特别是面对高重心的双足机器人可是要把它们全面压制了,可能面对激光恐龙时会被动些,但可以通过机动性取胜,而面对激光战斗卡车则可通过大动力和全地形能力击败之。而且零件全部源自6+n合一套装,不需要添置其他零件,方便玩家们体验。
作为6+n合一的+n玩法之一,稍后些时间会把电子版拼装说明书做出来,并上传到网盘,届时扫包装盒或说明书上的二维码便可获取。
【 Starry Laser Model+n Gameplay 】
Laser Red Scorpion
Using dual motors and tracks as the driving mode, but with three pairs of wheels, one pair in the front and two pairs in the back, the chassis presents a diving posture. The exterior of the front of the car serves as the front bumper, and the motor wire passes through it to avoid entanglement due to collision with the tracks and gears.
A pair of grippers are installed above the front of the car, powered by a servo motor at the rear of the vehicle, and linked to the "scorpion tail". The scorpion tail lifts and punctures while the grippers also grab or extend, allowing for close combat. But the important thing is that the scorpion tail is equipped with a laser emitting module, which can perform remote attacks.
The side of the vehicle is covered with exterior components as side skirts to prevent the gaps in the tracks from being nested and losing mobility when impacted from the side by other models during battles.
The Red Scorpion, which possesses both near and far attack power, is the strongest form of the tracked tank in the suit.
Do you remember the Razer in the robot arena? The inspiration for the close combat ability of the Red Scorpion's tail comes from it. Of course, the sharp arrow runs on wheels, while the Red Scorpion runs on tracks. In addition, the Red Scorpion also has a pair of claws and laser launch modules, making it more aggressive.
Can anyone remember a set of Beetle remote-controlled tanks from LEGO in the past? This series consists of four tanks with different shapes: red, blue, green, and purple; Red running tracks, with three colors of running wheels left, and one of them is a three wheeled vehicle. Back in elementary school, my dad bought me a red one. The red one had running tracks and also had three pairs of forward leaning wheels. Unfortunately, there was a collision sensor fixed to the front of the main control panel of the car. The LEGO designer equipped it with a double hook front bumper, which had insufficient attack power.
The Red Scorpion, which I have spent so much time designing, has gathered the strengths of many families to create the tracked robot in my heart's arena. It has a solid base, tracks that can adapt to all terrains, dual motor power, and rich near and far attack methods, making it easy to defeat various opponents; Especially when facing high center of gravity bipedal robots, they need to be completely suppressed. They may be more passive when facing laser dinosaurs, but they can win through maneuverability, while when facing laser combat trucks, they can be defeated through high power and all terrain capabilities. And all the parts are sourced from the 6+n integrated set, so there is no need to add other parts, making it convenient for players to experience.
As one of the+n gameplay modes of 6+n integration, the electronic version of the assembly manual will be made and uploaded to the online storage later. At that time, you can scan the QR code on the packaging box or manual to obtain it.
以下为实物图 Physical images:


红蝎子看着感觉憨憨的,但被它钳制住就不好过了,履带直接碾上对方模型上面可是轻而易举的,若是被它钳住了激光接收模块,那它尾部的激光发射器一顿输出必定把分给全拿了。
这红蝎子的尾巴长着个激光发射模块,看着有点像独眼机器人的脑袋,我究竟要叫它是头部,还是叫它尾部好呢?真难抉择呀。
The red scorpion looks clumsy, but it's not easy to be restrained by it. It's easy for the track to directly run over the opponent's model. If it's restrained by the laser receiver module, the laser emitter at its tail will definitely give up all the points in one go.
This red scorpion has a laser emitting module on its tail, which looks a bit like the head of a one eyed robot. Should I call it the head or the tail? It's really difficult to make a decision.
————————————————————————————————
【Starry Star Model+n Gameplay】
Starry Star 4WD Crossover

也是基于6+n合一套装零件,再加两个万向节,万向节一到,立刻开工,底盘大概用了一小时设计好了,但结果,车架细节和后续结构优化,算下来有十多小时的设计+拼装时间了,共用475个零件。
It is also based on a 6+n integrated set of parts, plus two universal joints. As soon as the universal joints arrive, work starts immediately. The chassis was designed in about an hour, but the results, including frame details and subsequent structural optimization, took more than ten hours of design and assembly time, totaling 475 parts.

车型用了crossover的样式,俗称轿跑SUV,其实我是向着拉力车的方向去设计的,但是自己给自己定了不增加过多零件的限制,只加一组万向节,所以车型呀只看得出一个两厢的样子。
The model adopts a crossover style, commonly known as a coupe SUV. In fact, I designed it in the direction of a rally car, but I set a limit for myself not to add too many parts, only adding a set of universal joints, so the model only looks like a two door car.

经过三版的改良,把轴距、车高、车宽、车长的比例做得更完美了,只是由于使用了单电机驱动四轮,传动轴吃掉太多动力了,极速还好,但加速稍微差了些。
After three versions of improvements, the ratio of wheelbase, height, width, and length has been made more perfect. However, due to the use of a single motor to drive all four wheels, the transmission shaft consumes too much power. The top speed is okay, but the acceleration is slightly worse.

车子的后备厢盖可以打开,并能看到模拟V4引擎,参考了20世纪有些小跑车就流行的这种中后置引擎后面留个小储物空间的设计。
The trunk lid of the car can be opened and a simulated V4 engine can be seen, referring to the design that was popular in some small sports cars in the 20th century, which left a small storage space behind the mid rear engine.

这个四驱系统是模拟传统燃油车那种用传动轴的设计,一个电机驱动一个传动轴同时带动前后轮轴的转动,同时前轴的转向功能也得以保留,整台车子几乎把除履带外的零件都全用了,估计小四百个零件吧。零件就比套装多了两个万向节,我现在考虑要不要往后套装里也加两个万向节?
This four-wheel drive system simulates the design of traditional fuel vehicles that use transmission shafts. One motor drives one transmission shaft while driving the rotation of the front and rear axles. At the same time, the steering function of the front axle is preserved. The entire vehicle uses almost all parts except for the tracks, probably around 400 parts. The parts have two more universal joints than the set. I am considering adding two universal joints to the set in the future?
往后可以设计一个分动箱上去?我就是觉得现在烂大街的电车全用双电机做分动式四驱,的确是省成本加高传动效率的做法,但是,我比较老派,我就要用数字技术去做模拟信息,我就要舍近求远,自我挑战。
Should I design a transfer case in the future? I just think that all the trams on the streets now use dual motors for differential four-wheel drive, which is indeed a cost-effective and efficient approach. However, I am more old-fashioned and I have to use digital technology to simulate information. I have to go far and challenge myself.
————————————————————————————————
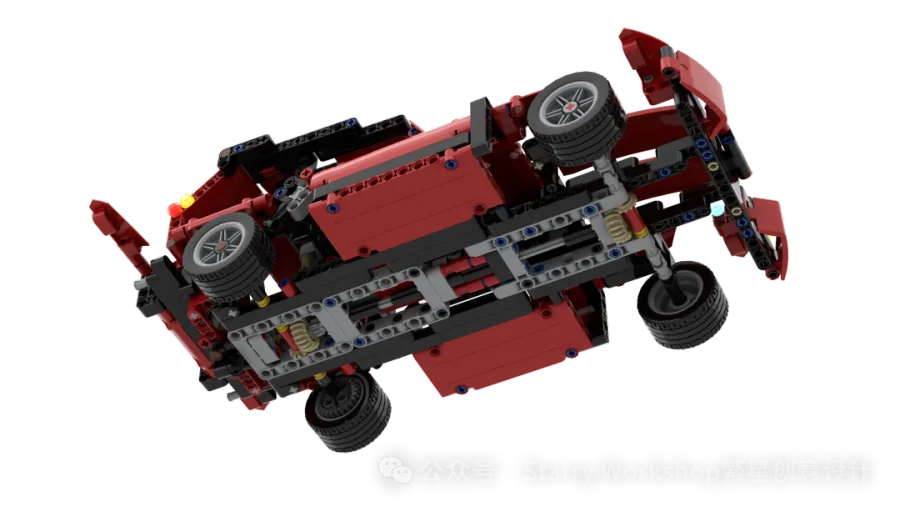
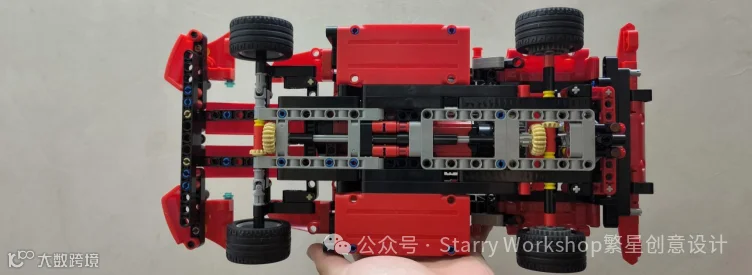
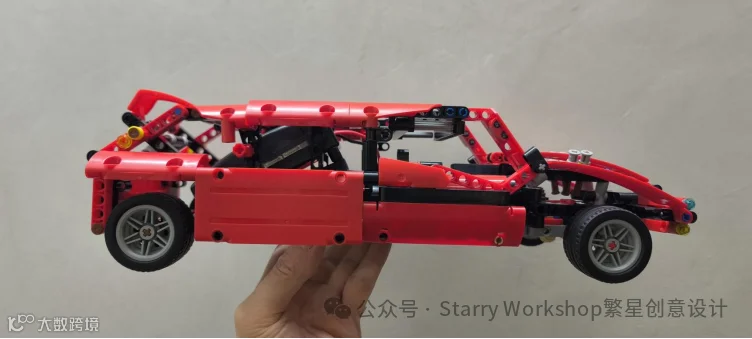
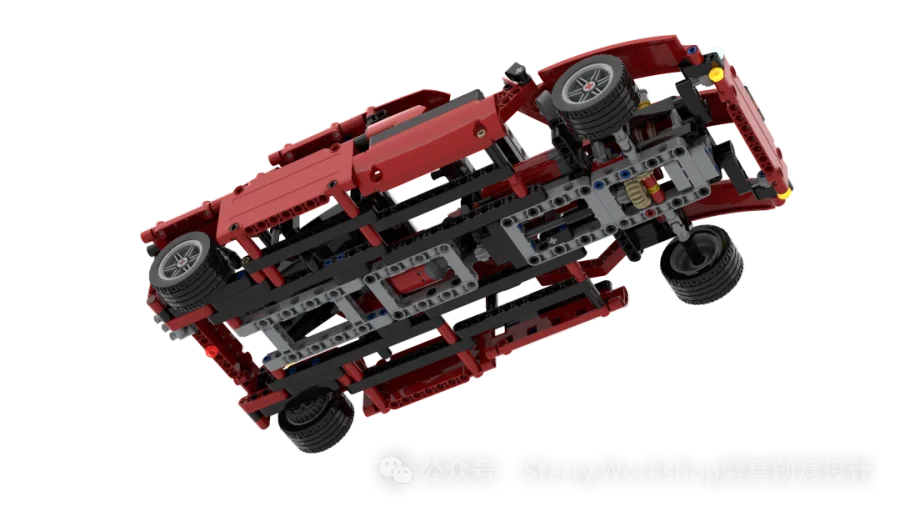
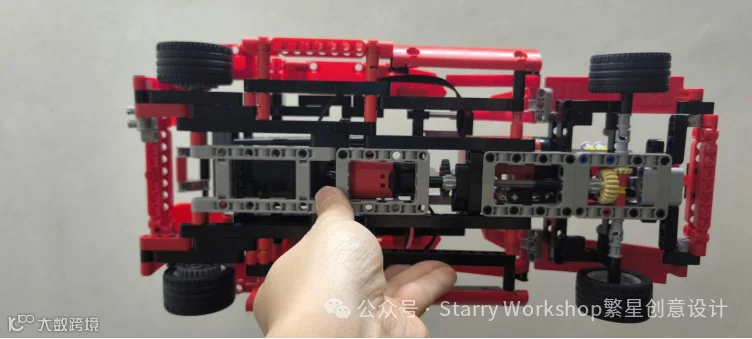
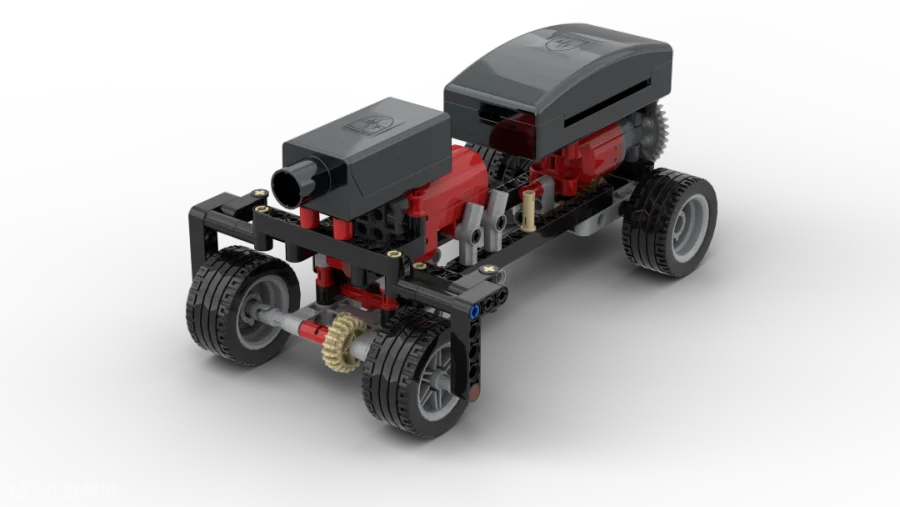
【Starry Star Model+n Gameplay】 Front wheel drive MPV

做了十几小时才做好,也是基于6+n合一套装的零件加两个万向节做出来的,前置模拟纵置V4引擎,前驱车,带遥控转向,把动力电机和转向电机全部堆到车头了,一共用了493颗零件。
It took more than ten hours to complete, and it was also based on the 6+n integrated set of parts and two universal joints. The front simulated longitudinal V4 engine, front wheel drive car, with remote control steering, stacked the power motor and steering motor at the front of the car, using a total of 493 parts.

前置前驱模拟出了推头特性,但单轴驱动也有加速和极速优势,改良后的车身更协调,车高更矮,同时尾部加装一对扰流板,让车子侧看不会显得太板直,更灵动。动力电机同时联动了模拟V4引擎,车子开动后,能让玩家观察到外露引擎缸体的活塞运动。
The front wheel drive simulates the thrust characteristics, but the single axle drive also has acceleration and top speed advantages. The improved body is more coordinated, with a shorter height. At the same time, a pair of spoilers are installed at the rear, making the car less stiff and more agile when viewed from the side. The power motor is simultaneously linked to the simulated V4 engine, allowing players to observe the piston movement of the exposed engine cylinder after the car starts.
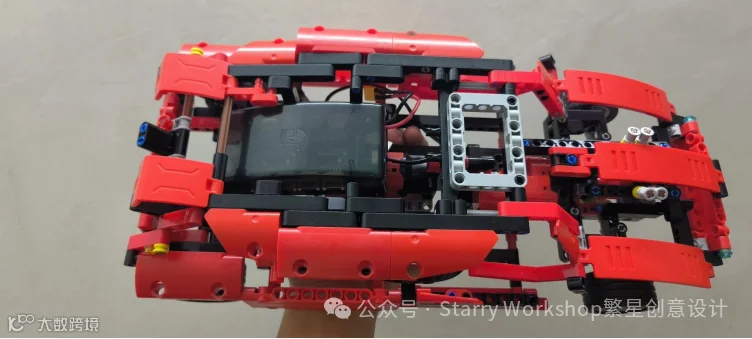
展示一下带转向功能的前驱底盘,能看到为了把重心配平得更好而把驱动电机和转向电机都往后移了。
Show the front wheel drive chassis with steering function, and you can see that both the drive motor and steering motor have been moved backwards to better balance the center of gravity.
————————————————————————————————
迷你后驱小车车 mini Rear Drive

迷你四驱小车车 Mini 4WD
————————————————————————————————

Roller Laser Bot
实物图 Physical image:

————————————————————————————————
④【繁星无人机产品】有刷穿越机
【Starry Brushed FPV Drone】

参数:
额定电压:1S / 3.7V
额定电流:8A
推力:280g(低功率电机)- 320g(高功率电机)
重量:90g(800mah电池)- 105g(1200mah电池)
推重比: 大于3比1
续航:6 - 10分钟(电池可拆装更换)
机身材料:ABS塑料
可选机身颜色:闪蓝、钢灰、中国红、雅黑、亮白
Rated voltage: 1S/3.7V
Rated current: 8A
Thrust: 280g (low-power motor) -320g (high-power motor)
Weight: 90g (800mAh battery) -105g (1200mAh battery)
Push to weight ratio: greater than 3:1
Battery life: 6-10 minutes (battery can be disassembled and replaced)
Body material: ABS plastic
Available body colors: Flash Blue, Steel Grey, Chinese Red, Elegant Black, Bright White

实物图 Physical image:

以及安装防护包边后实物图
physical pictures after installing protective edging:

售价:668元/套,配hot RC遥控器、800mah和1200mah电池
可搭配上述繁星激光模块使用,可进行激光空战、编队对抗,更可通过地面站进行计分。
Price: 668 yuan (one set, equipped with hot RC remote control, 800mAh and 1200mAh batteries)
It can be used in conjunction with the above-mentioned star laser module for laser air combat, formation confrontation, and scoring through ground stations.
——————————————————————————

