

装五福、卸万物,适应各类载具;装卸万物、链接世界,全球智能装卸机器人联盟引领行业健康有序发展!
【重要活动】企业家西安交大“真理思源行”活动--聚焦国家战略需求、传承弘扬西迁精神



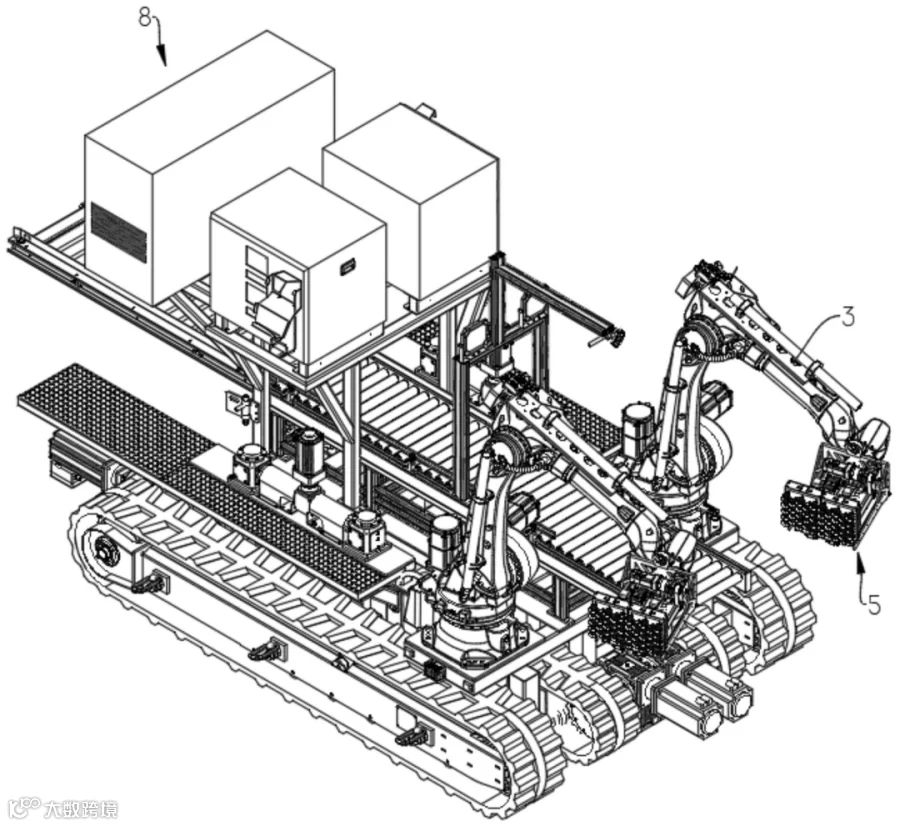
云南柔控科技有限公司研发的“一种子母履带小车件箱自动装卸车机器人”通过子母履带车协同结构与自适应装卸技术,突破了传统物流装卸对人工的依赖及车型适应性局限。其创新点集中在双车模块化分工、鹅颈板智能适配及紧凑空间作业能力,技术难度主要体现在多系统协同控制与动态环境感知,落地路径可依托现有物流园区改造,与国际同类产品相比在双向作业与成本控制上具备差异化优势。


1.1 整体结构组成
该机器人系统由五大核心部件构成:
- 子履带车
搭载机械臂与输送机,负责车厢内精细作业,采用独立履带驱动,具备狭小空间通过性。 - 母履带车
配置可竖向升降轿厢及驱动装置,通过双输出轴电机与丝杆丝母结构实现±10mm级高度调节,承载子车完成与货车的对接。 - 双机械臂系统
对称布置于输送机两侧,配合末端装卸夹具实现件箱抓取与码放,支持顶吸/侧吸双模式(。 - 自适应输送机
含过渡输送机与电动滚筒,通过阻挡机构控制件箱流向,视觉相机与补光灯实现环境与件箱检测。 - 装卸夹具
创新设计同步带组件驱动吸盘组件与托板相向运动,实现“吸取-托底”双重固定,适应300-550mm尺寸件箱。
1.2 作业流程
装车工序(以带鹅颈板货车为例):
-
母履带车通过视觉系统检测鹅颈板高度,驱动轿厢调节至匹配高度; -
子履带车驶入车厢,机械臂通过吸盘夹具抓取件箱并按订单码放; -
件箱经输送机过渡至仓储系统,完成循环作业。
卸车工序:

2.1 子母协同作业模式
采用“母车运输+子车作业”的复合结构:
- 母车
解决不同车型(有无鹅颈板)的高度适配问题,通过伺服控制升降轿厢实现0-1.2m高度调节; - 子车
独立进入车厢,履带式设计确保在不平整地面的通过性,较传统轮式AGV提升40%越障能力。
2.2 智能环境感知与自适应控制
- 多传感器融合
视觉相机+补光灯实现鹅颈板识别(误差<5mm)、件箱定位(10mm级精度)及动态障碍物规避; - 双机械臂协同
通过控制箱组实现双臂交替作业,效率较单臂提升60%,支持800-1200箱/小时处理量。
2.3 装卸夹具创新设计
- 同步带传动机构
吸盘组件与托板通过同步带反向运动,实现“吸取-托底”联动,抓取稳定性较纯吸盘结构提升30%; - 柔性适配能力
支持300-550mm件箱尺寸,兼容纸箱、袋装货物,无需更换夹具。

3.1 机械系统集成难度
- 轿厢升降精度控制
双输出轴电机+丝杆传动需克服负载变化(子车+货物总重约2.5吨)导致的定位偏差,通过PID算法将波动控制在±0.5mm; - 履带底盘协同
子母车行走路径规划需解决转弯半径(母车最小5m,子车2m)与对接精度(±2cm)的矛盾,采用激光SLAM导航技术实现动态路径修正。
3.2 控制系统复杂度
- 多设备通信延迟
控制箱组需同时处理子母车运动、机械臂操作、输送机调度等12路信号,采用工业以太网实现1ms级数据交互; - 环境适应性算法
针对货车内光照变化(0-2000lux)、件箱堆叠无序等场景,开发基于深度学习的鲁棒识别模型,识别准确率需达99.5%以上。
3.3 可靠性工程挑战
- 粉尘/振动防护
电机、传感器等核心部件需达到IP65防护等级; - 长周期稳定性
关键结构件需通过10万次疲劳测试,确保3年无故障运行。

4.1 实施步骤
- 试点阶段
(0-6个月):选择电商物流园区进行单工位部署,验证带鹅颈板货车的装卸效率; - 标准化阶段
(6-12个月):优化控制系统兼容性,支持与WMS/MES系统对接,降低部署周期至2周; - 规模化阶段
(1-2年):推出RaaS(机器人即服务)模式,按装卸件箱数量收费(预计0.05-0.1元/箱),降低客户前期投入。
4.2 成本效益分析
- 硬件成本
子母车系统约80-120万元/套; - 运营成本
年维护费用约5万元, electricity consumption 10kW; - 投资回报期
按单班3名人工(月薪6000元)计算,约1.5-2年收回成本。

5.1 国内竞品对比
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.2 国际技术对标
- 波士顿动力Stretch
单臂吸盘设计,仅支持卸货(对比本专利双向作业),售价约50万美元,效率1500箱/小时; - Contoro Robotics Duo-Grasp
采用两点抓取技术,依赖远程人工干预(HITL模式),本专利通过全自动化算法减少90%人工介入; - iLoabot
具身智能技术实现±150mm月台自适应,但采用轮式底盘,复杂地面通过性弱于本专利的履带设计。

6.1 现存瓶颈
- 环境适应性
极端天气(-20℃以下或暴雨)下视觉系统可靠性需提升; - 能耗优化
母车升降机构待机功耗占比达30%,需开发能量回收技术; - 多车协同
当前仅支持单子母车作业,集群调度算法待突破。
6.2 技术迭代建议
- 轻量化设计
采用碳纤维材料降低子车重量(目标:从1.2吨降至800kg); - AI决策增强
引入强化学习优化码垛路径,提升空间利用率15%; - 模块化拓展
开发可拆卸式机械臂末端,兼容桶装/异形货物。



E N D

装卸是“生产制造+流通”全球物链网中的卡脖子环节,智能装卸是解决卡脖子环节的必要手段,智能装卸机器人和设备是解决卡脖子问题的重要工具,是机器解决劳动力短缺的重要领域,也是需要解决的行业迫切需求,全球智能装卸机器人联盟和西交智能装卸研究院由浙江西安交通大学研究院发起成立,旨在聚集行业资源,为行业企业赋能,解决行业问题,共同推动行业健康发展,欢迎关注!欢迎智能装卸产业链上下游行业企业加入联盟,有开发装卸机器人的企业需要技术和产品定位支持,加微信18555151809:
更多精彩关注下面公众号和视频号
-全球智能装卸车机器人联盟引领行业发展-
扫码加企业微信申请加入行业群

