
摘要
通常伺服电机的的全闭环控制的方式有两种:一种是在伺服驱动器里实现(电流环,速度环,位置环全在驱动器里),另一种是在控制器里实现(电流环,速度环在驱动器里,位置环在控制器里)。具体全闭环控制的应用场合和环境,需要根据现场的工作条件以及具体的工艺要求而定,灵活应用切实解决客户设备工艺需求。
软硬件版本
控制器硬件
伺服驱动器:AX5203-0000-0214;
伺服电机:AM8031-0D20-0000;
编码器:海德汉ECN113-2048S-5V-En2.1;
第三方减速机(速比100:1)。
应用案例介绍
Beckhoff控制器带AX5203-0000-0214驱动器和AM8031-0D20-0000电机。电机通过减速机(速比100:1)驱动一个圆盘,电机线缆连接到AX5203的Channel A;
圆盘机构有一个海德汉的ECN113-2048S-5V-En2.1(单圈绝对值编码器速比1:1)作为角度反馈,该编码器反馈信号接到AX5203驱动器的X11口,作为驱动器Channel A的第二反馈,希望AX5203驱动器工作在全闭环模式下,精确控制最终负载圆盘的定位精度;
该圆盘机构的工艺要求是:
加减速过程时间较长;
设备大部分运行在匀速状态,匀速运行速度波动小;
定位精度高,伺服采用全闭环控制方式;
圆盘常时间向一个方向运转;
控制器常期运行,不关机不停电;
特殊情况下伺服驱动器的EtherCAT网络可能中断,要求网络恢复后圆盘的模值不变;
特殊情况下伺服驱动器的电源可能断开,控制器的电源不一定断电,要求驱动器电源恢复后圆盘的模值不变。
方案应用介绍
现场客户按本文摘要所述的标准第一种全闭环控制方式对AX5000驱动器进行配置,可以成功运转电机,反馈的速度、位置、角度也是正确的。但因为负载圆盘机构是始终是单方向运转,在运转到编码器值反馈32位寄存器溢出后,此时如果中断了伺服驱动器的EtherCAT通讯网络,再等该网络恢复后,此时读取到的圆盘的模值与网络没有中断前的模值不一致,这样如果再继续运行势必就会导致设备出现不正确的动作,甚至可能导致设备报警或损坏,后果很严重。
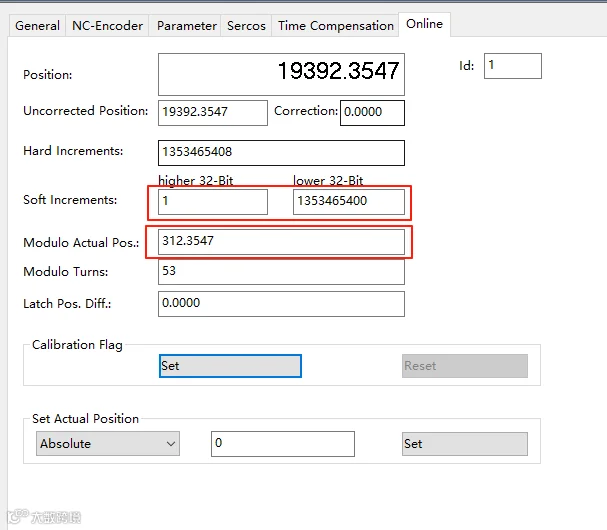
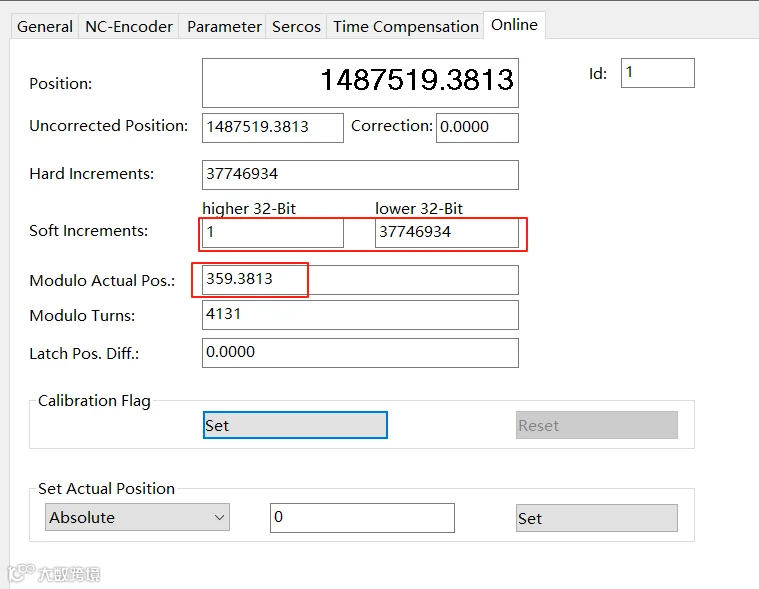
网络中断前
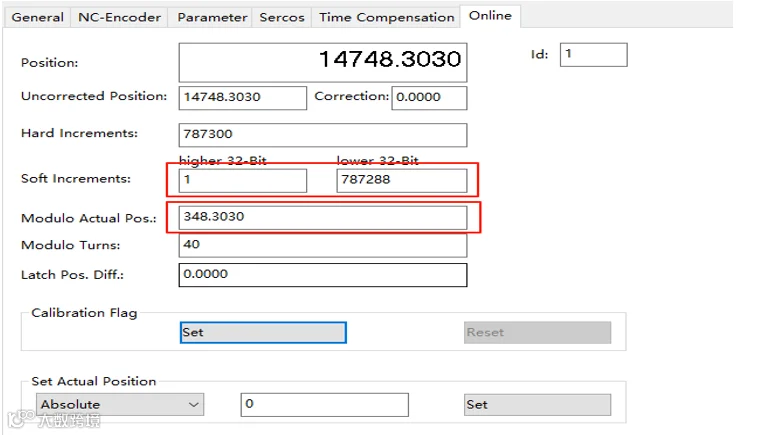
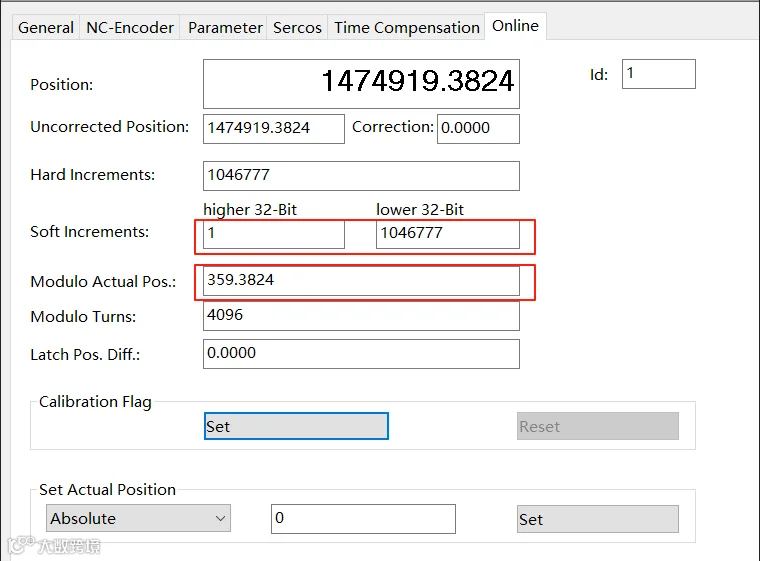
网络恢复后
方案问题分析
具体分析模值不一致的原因,是因为减速机的速比是100:1。在NC中的编码器值总计数寄存器是64位,全闭环第二反馈编码器的反馈值低32位寄存器,在负载圆盘每转40.96圈(数值每圈增加104857600)时,就会溢出一次,同时向高32位寄存器进位1,圆盘的模值也就是根据这个64位的总值计算出来的。在系统一直运行时模值是正确的,但当驱动器网络中断后再接通网络,这时就会出现低32位寄存器的数值变动为一个介于(0~104857600)间的一个数值,但高32位的寄存器里的数值还保持原有值。此时,根据这个总的64位的值换算到的圆盘的模值就会与网络中断之前的模值不一致。分析下来的结果是圆盘每转40.96圈若断网络后再连上网络会导致新显示的模值比断网前的模值相差14.4°。之所以产生这个现象的原因就是低32位寄存器数值最大时(4294967296/104857600不等于0),也相当于4096对100取模,模值不为0引起的。
方案一:更换减速机
根据以上分析的原因,要解决以上的问题兼顾到负载的扭矩和速度要求,最好的解决办法是重新选一个速比2n倍的减速机,就可以彻底解决以上问题。
方案二:在控制器中实现全闭环
因为客户现场不具备更换减速机的条件,但还需要基于现有的条件把设备正常运行起来,且满足之前的工艺要求。所以这次就采用了另外第二种全闭环控制方式来配置,巧妙地实现了以上工艺要求。
原来的全闭环控制方式是速度环和位置环全部运行在AX5000的驱动器里,现在采用的全闭环控制方式是速度环运行在AX5000的驱动器里,位置环运行在控制器的NC中。
方案原理介绍
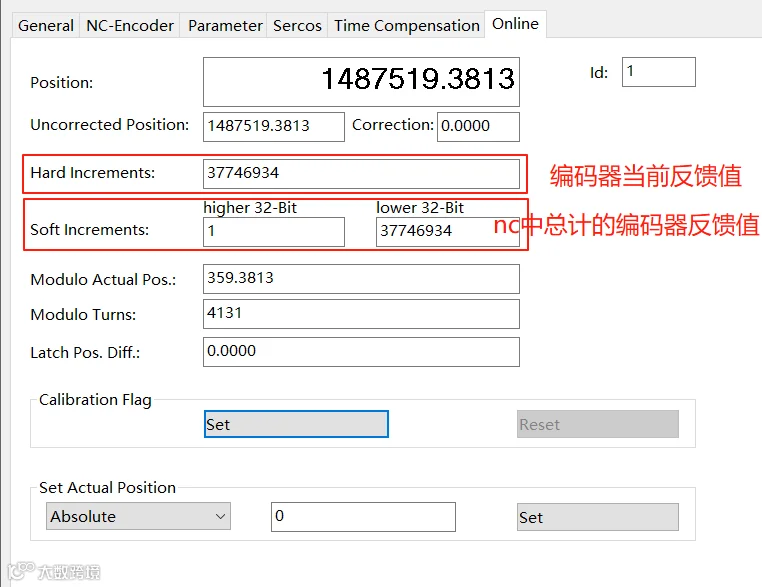
TwinCAT的NC系统中,可以读取编码器的反馈当前值,该值是32位的,最大到232=4294967296,超过该值时,该反馈当前值又从0,1,2……开始计数。而NC中还有一个总的64位编码器反馈值寄存器,由两个32位寄存器组成。该值在lower 32-bit计数到232=4294967296时,会向higher 32-bit进位1,而lower 32-bit又从0,1,2……开始计数。
若按标准的全闭环,将位置环做在驱动器里,那么NC中的Scaling Factor 就要设定成 360°/(1048576*100),要考虑100倍的减速比。
采用第二反馈编码器(单圈绝对值),每次拔网线再插上后,编码器当前反馈值和NC中总计的编码器反馈值的lower32-bit值会初始化回到0~104857600范围内的某一个值,但NC中总计的编码器反馈值的higher32-bit的值没有变化,那么根据NC中总计的编码器反馈值(64位)计算出来的Modluo Actual Pos就与拔网线之前的值不一致;
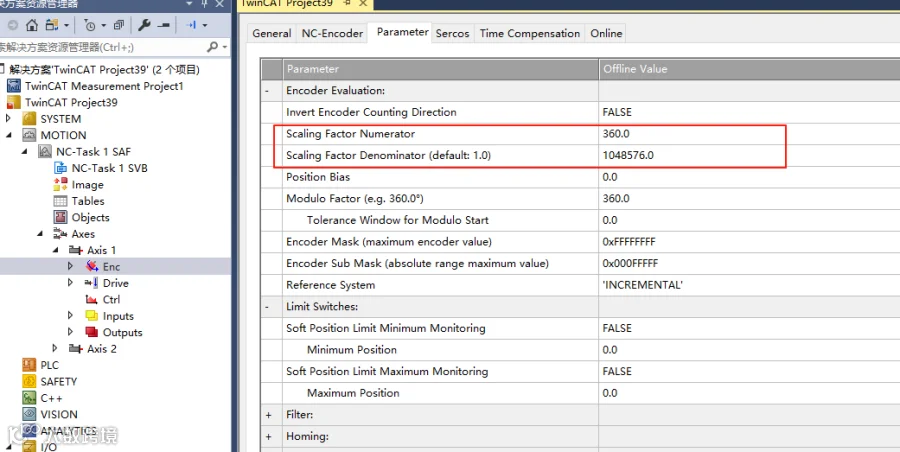
若将位置环做在控制器里,那么NC中Scaling Factor 就要设定成 360°/1048576,这里相当于1:1的加速比。
采用第二反馈编码器(单圈绝对值),每次拔网线再插上后,编码器当前反馈值和NC中总计的编码器反馈值的lower32-bit值会初始化回到0~1048576范围内的某一个值,但NC中总计的编码器反馈值的higher32-bit的值没有变化,那么根据NC中总计的编码器反馈值(64位)计算出来的Modluo Actual Pos就与拔网线之前的值是一致的。
操作步骤说明
具体的配置方法和步骤如下:
-
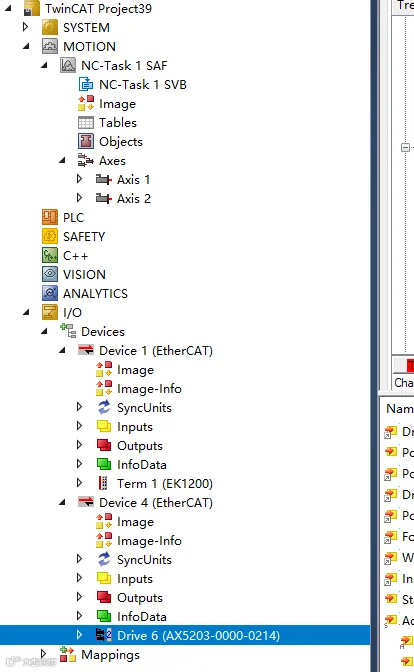
创建TwinCAT工程,连上控制器,在Congfig模式下扫描到硬件设备和驱动器;
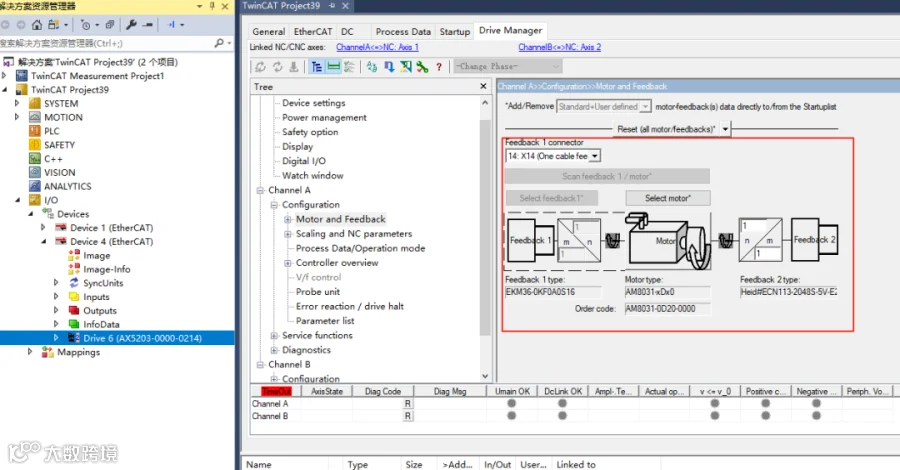
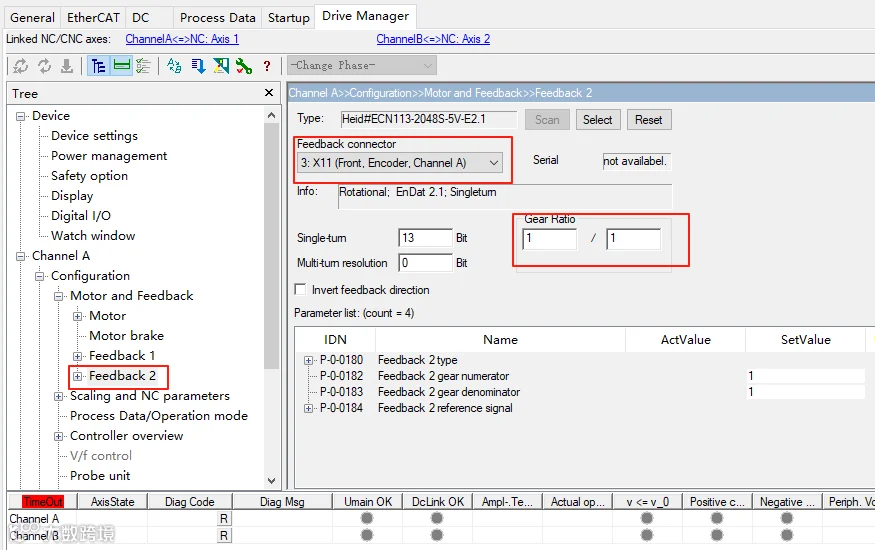
在驱动器中配置好电机和编码器,包括第二编码器反馈;
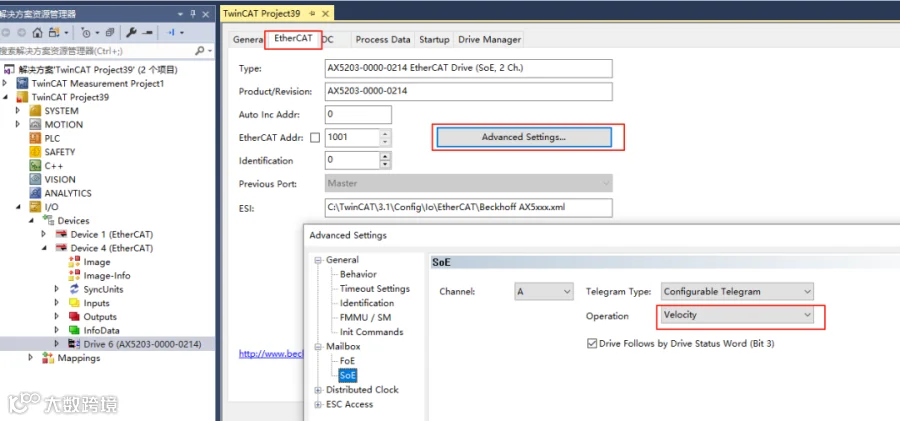
将驱动器Channer A的控制模式改为Velocity;
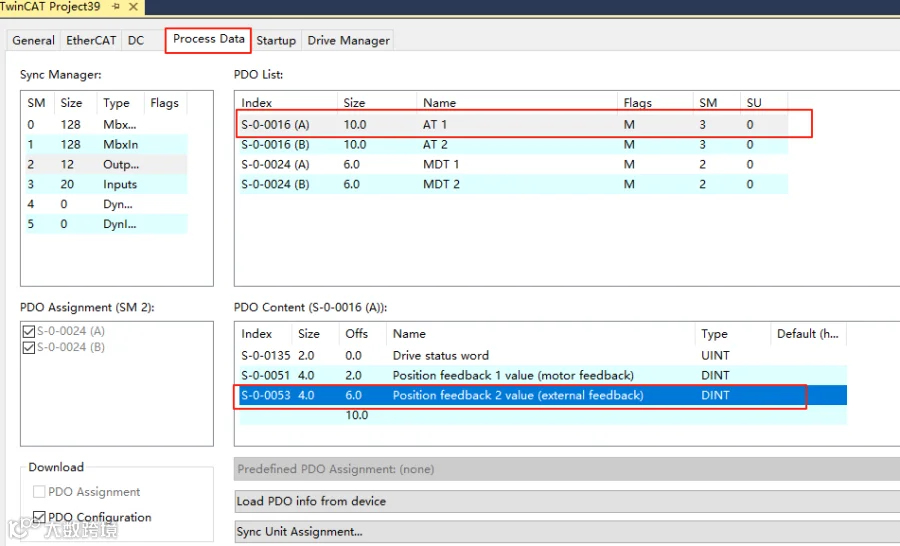
在Channer A 的Process Data中AT 1中增加S-0-0053;
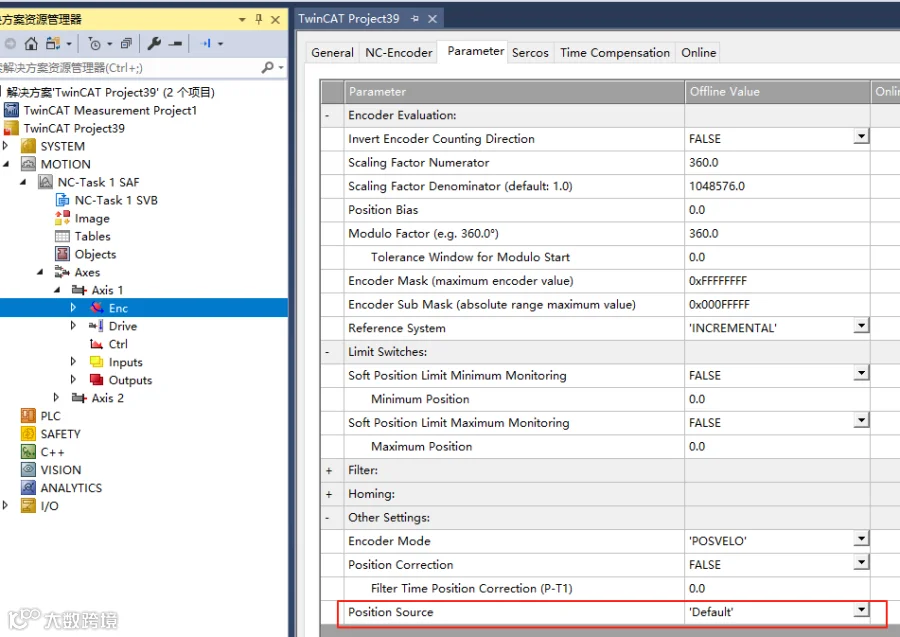
在Motion→Axis 1→Enc中修改参数(见下图);
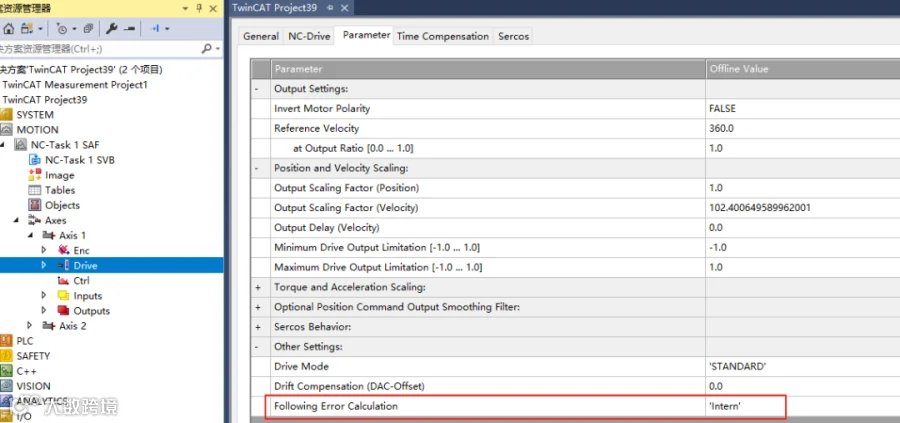
在Axis 1→Enc的参数中,将Position Source设置为Default;Drive的参数中,将Following Error Calculation设置为Intern;
在NC中,使用电机自带的编码器,让电机可以正常运转起来。同时注意观察第二编码器反馈的计数方向,与电机的运行方向是否一致,方向不一致要修改计数方向;
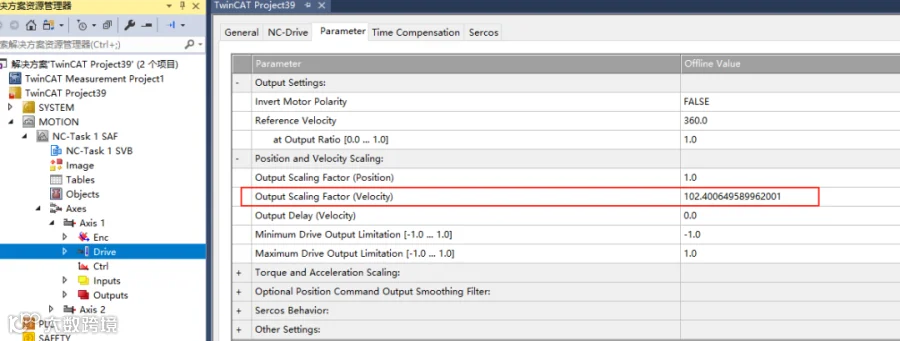
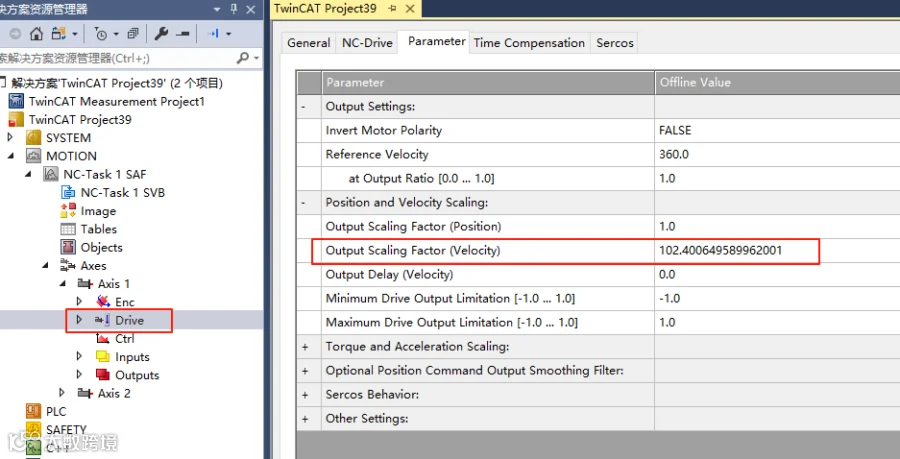
在Axis 1→Drive的参数中,将Output Scaling Factor(Velocity)设定为原来值的100倍。因为减速机的速比为100:1,要使速度环与位置环的量纲一致;
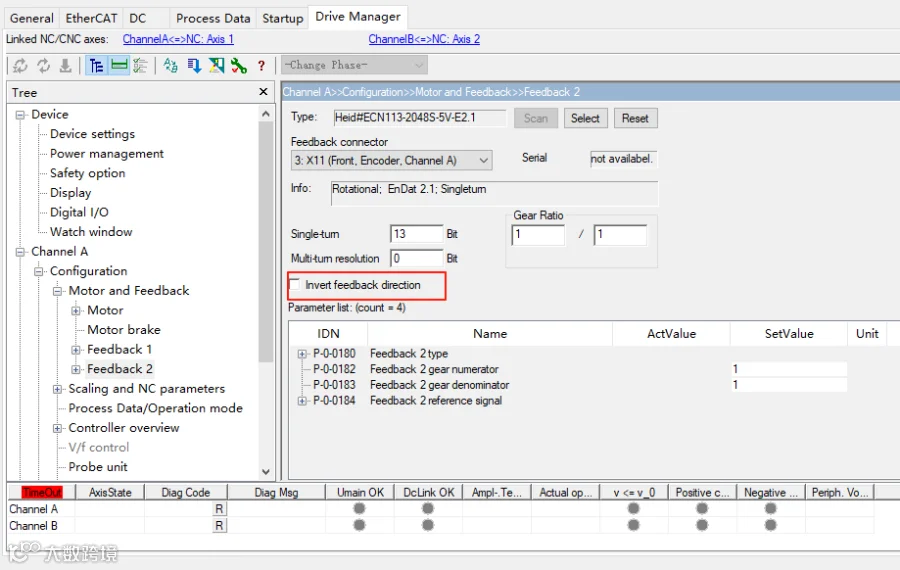
在驱动器的Drive Manager中确保第二反馈编码器的N/M为1/1;
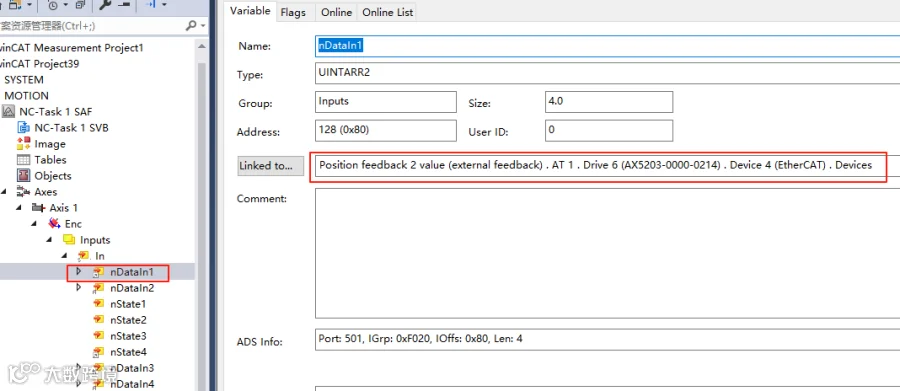
将Axis 1→Enc→Inputs→In→nDataIn1按下图所示,链接到feedback 2(external feedback);
激活硬件配置后,再进入Axis 1→Drive→Parameter界面,验证Output Scaling Factor(Velocity)有没有放大100倍。如果没有,需要改成放大100倍,再重新激活硬件配置;
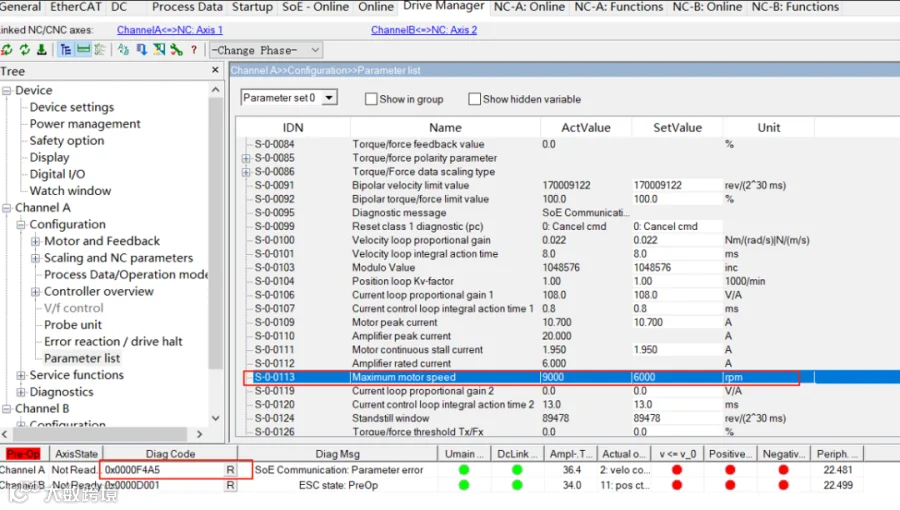
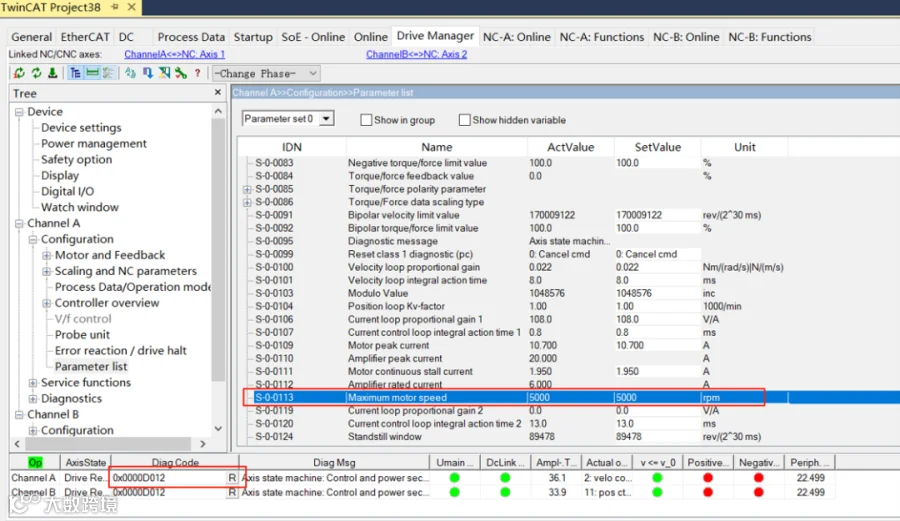
若激活完成后,Axis 1的Online值为灰色,可能是驱动器出现了报错,需要到驱动器侧检查。若出现下图所示的报错,则需要将S-0-0113设定为一个较小一些的数值,再重新激活,直到驱动器不报错;
激活后没有报错,可以运转电机,验证电机运转速度和定位是否正确;
-
再单方向运转电机,直到编码器反馈计数高32位有进位,这时可以停机,记录下当前负载圆盘的模值和编码器计数值;
将EtherCAT网线中断后又连上。此时,编码器计数的高32位数据没有变化,编码器计数的低32位数据更新为(0~1048576)以内的一个值,模值基本与断网之前的值一样;
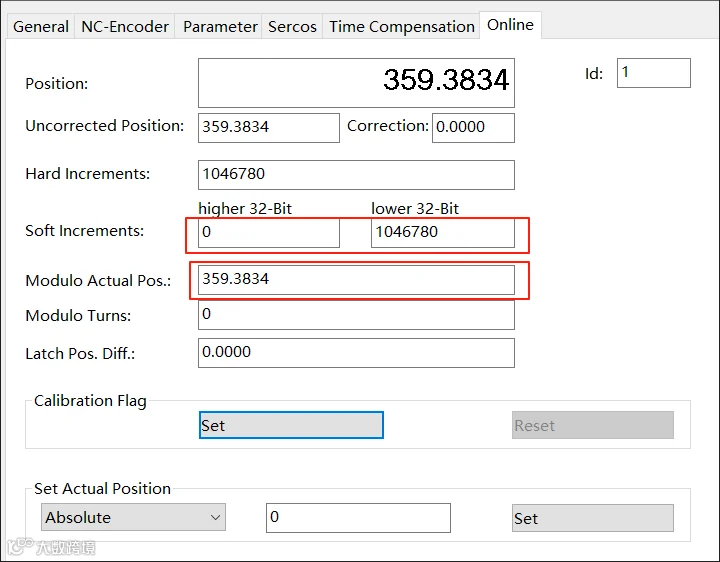
重新激活,激活后编码器计数的高32位数据更新为0,编码器计数的低32位数据更新为(0~1048576)以内的一个值,模值基本与断网之前的值一样;
如此经过客户反复验证,断网络、断伺服控制电源、重新激活系统的多种方式的测试,圆盘的模值始终与之前的保持一致,所以该种方式是一种可行的解决方案,解决了现场的工艺需求;
-
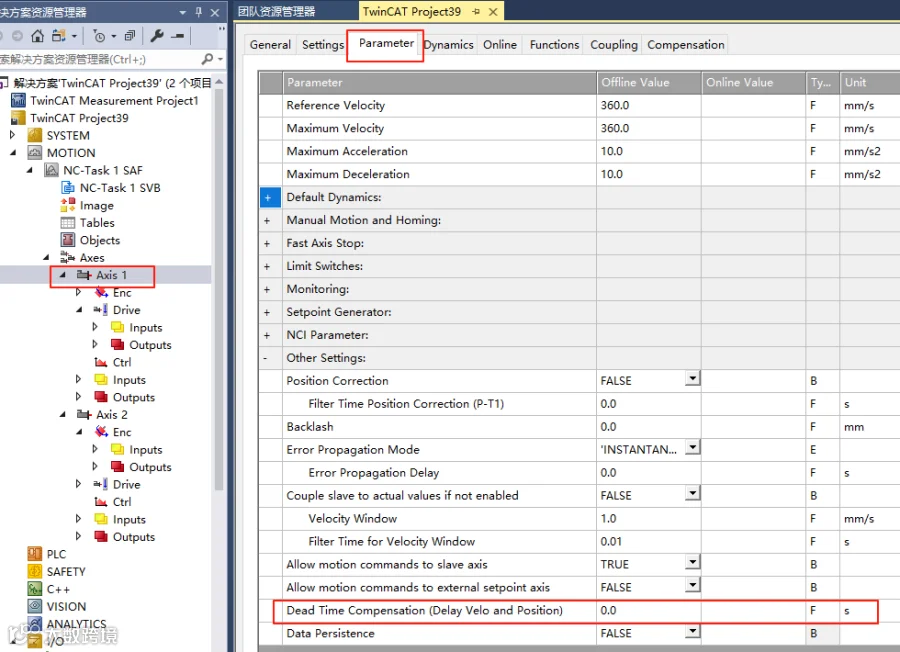
在使用位置环在TwinCAT NC中完成的运动控制,都需要设置死区补偿,建议将补偿时间设置为为3.5到4个NC SAF周期,此处单位为秒(s);
另外在使用位置环在TwinCAT NC中完成的运动控制,一般可以在Axis—Ctrl中选择NC控制模型,合适的控制模型在不同应用场景可以达到较好的控制效果。
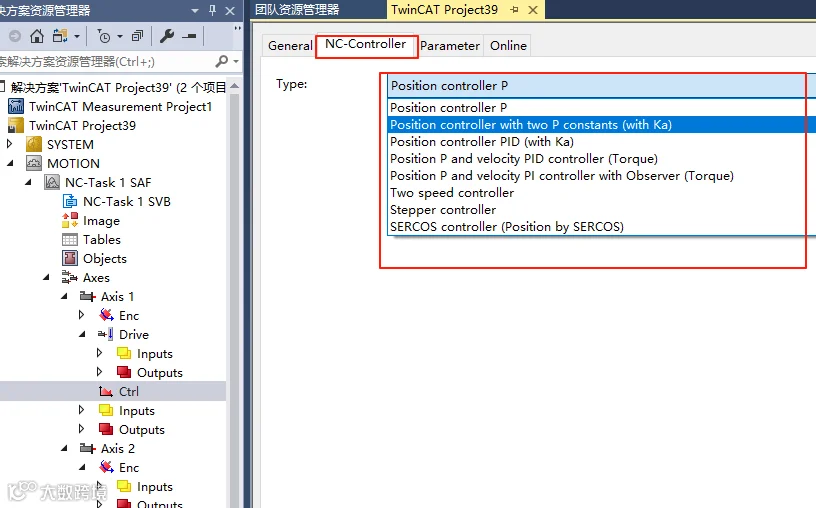
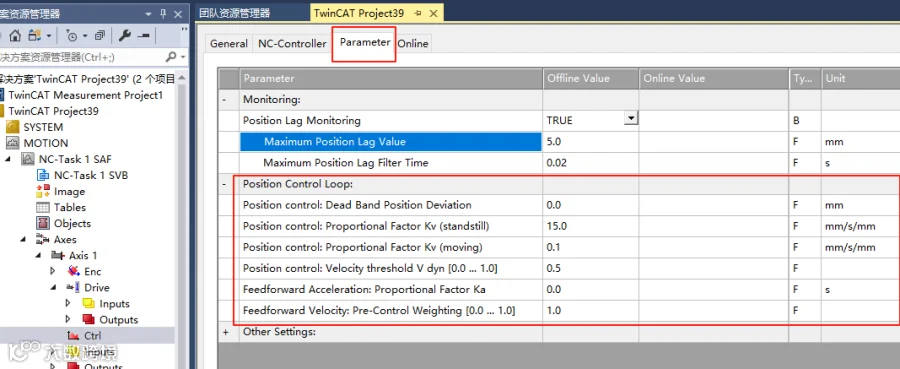
选择合适的控制模式对应的参数设定调整界面如下:
结语
伺服系统在现场有各种应用场景,需求也是多种多样。怎样利用现有的电气硬件配置,在较少改动机械结构和配置的情况下,充分发挥 Beckhoff 运动控制系统的特长、灵活巧妙地解决具体的应用需求,还需要我们不断地实践、验证、总结和完善,相信 Beckhoff 的运动控制产品能满足大部分客户的工艺需求。