

近期,题为《Learning Structured Robot Policies from Vision-Language Models via Synthetic Neuro-Symbolic Supervision》的论文正式发布,该论文由意大利帕多瓦大学、弗劳恩霍夫意大利研究所等机构的研究者联合撰写,聚焦于机器人学习领域的核心痛点,提出了一种融合视觉语言模型(VLMs)与行为树(BTs)的神经符号方法,跳出了当前端到端视觉-动作模型的“黑箱困境”,为安全关键场景下的机器人决策提供了一条可解释、可迁移、可落地的全新路径,也为机器人学习的未来发展提供了更深刻的思路。
现状痛点
01
端到端的黑箱困境
在当下的机器人学习领域,视觉语言模型的崛起已经极大地推动了多模态感知与机器人行为的结合。从OpenVLA到RT-2,各类视觉-语言-动作模型已经能够较好地将图像观测、自然语言指令与机器人的低层动作进行映射,让机器人能够理解人类的自然语言指令,并根据视觉场景做出相应的操作。但这些主流方法大多采用“端到端”的训练模式,即模型直接接收视觉输入和语言指令,输出关节角度、末端执行器轨迹等低层动作指令,其内部的决策逻辑完全处于“黑箱”状态——无法得知模型为何做出某个决策,也无法提前校验决策的安全性,更难以在决策出错时追溯问题根源。这种不可解释性,在工业装配、医疗辅助、家庭服务等安全敏感场景中,成为了制约机器人大规模落地的致命瓶颈——一台无法解释决策逻辑的手术机器人或工业机械臂,一旦出现误操作,可能会造成不可挽回的损失。
传统方案
02
行为树的优与劣
与此同时,传统的机器人控制系统却有着截然不同的优势。行为树(BTs)作为一种模块化、可解释、反应式的任务执行 formalism,早已在机器人领域广泛应用,尤其适用于安全关键的操作流程。它将复杂任务分解为简单的原子动作和条件判断,通过序列、选择、并行等组合节点,构建出层次清晰、逻辑明确的决策树,每一步操作都有明确的逻辑依据,执行过程中可以实时响应环境变化,出现故障时也能快速定位问题、实现恢复。但遗憾的是,传统行为树高度依赖专家手工设计,不仅耗时耗力,而且难以适配复杂多变的桌面操作场景和灵活多样的自然语言指令——当环境中的物体位置、颜色发生变化,或者人类指令的表述方式改变时,专家设计的行为树往往需要重新调整,灵活性和泛化能力极差。
核心创新
03
优势的融合与突破
该论文的核心价值,正是打破了“黑箱大模型”与“传统符号系统”之间的壁垒,用神经符号方法实现了两者的优势融合:既借助视觉语言模型的多模态感知与推理能力,摆脱对专家手工设计的依赖;又依托行为树的结构化特性,保证决策的可解释性与安全性;同时,通过合成数据的创新应用,彻底解决了真实机器人数据采集慢、标注贵、风险高的瓶颈,实现了“鱼与熊掌兼得”。
数据构建
04
合成数据生成
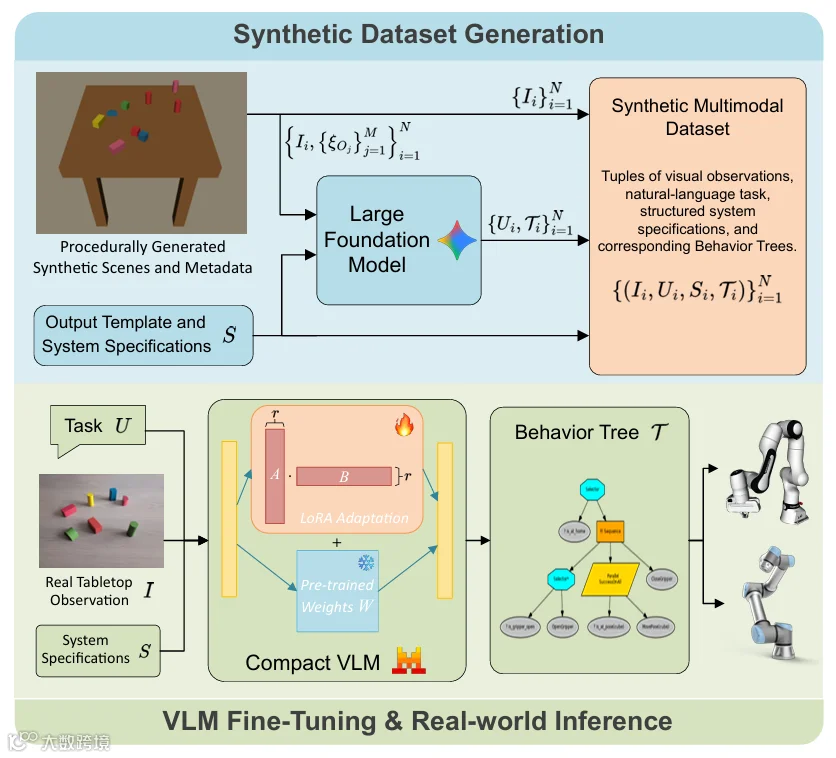
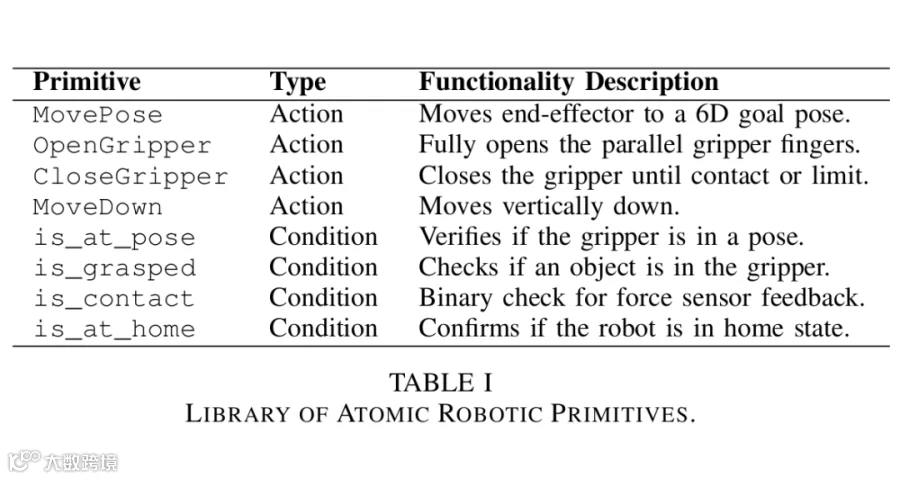
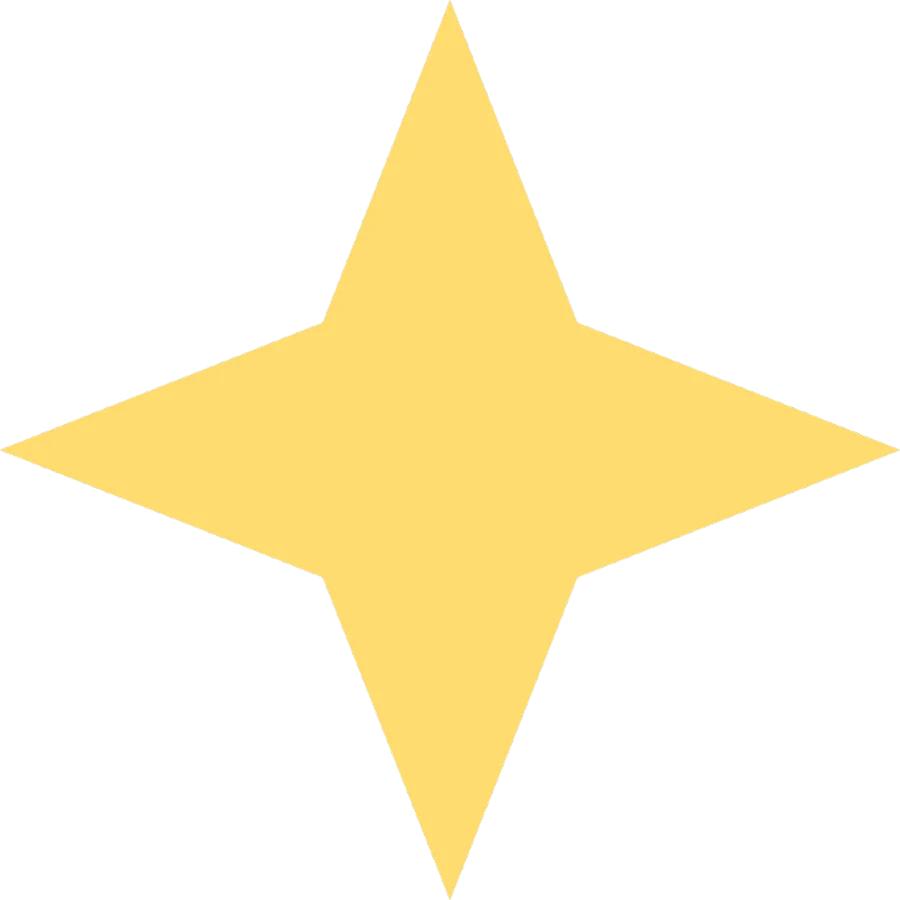
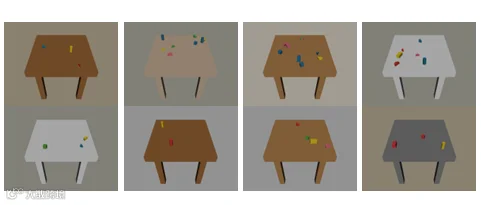
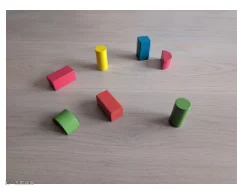
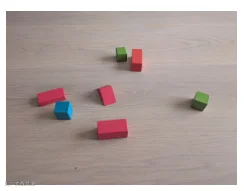
论文提出的框架逻辑清晰、可操作性极强,整个流程可以分为三个核心阶段,每一步都体现了研究者的严谨与创新。第一阶段是合成数据集的自动生成,这也是整个框架的基础。研究者利用MuJoCo物理引擎, procedurally生成了10000组域随机化的桌面场景,这些场景包含棱柱、长方体、圆柱体等多种几何实体,物体的颜色、空间位置均进行随机化处理,最大限度地模拟了真实场景的多样性,为模型的泛化能力打下了基础。随后,研究者利用Gemini 3 Flash大模型,针对每个合成场景,自动生成“自然语言指令-行为树”的配对数据——在生成过程中,他们采用了高低两种采样温度的策略:高温度(T=1.4)生成多样化的人类-centric指令,避免指令过于模板化;低温度(T=0.2)生成结构一致、逻辑严谨的行为树,减少符号输出的变异性和幻觉。这种自动化的标注 pipeline,完全无需真实机器人演示和人工标注,既降低了成本,又保证了数据的逻辑一致性,解决了传统机器人学习中数据稀缺的核心痛点。
模型优化
05
Pixtral微调
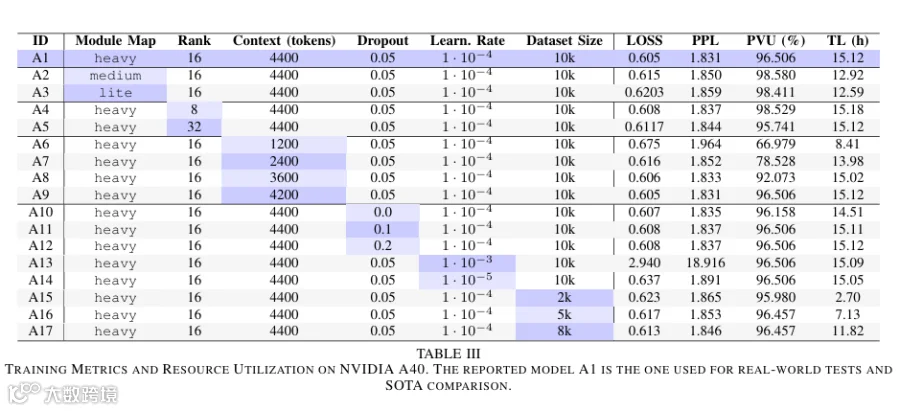
第二阶段是模型的微调与优化。研究者选择了开源的Pixtral-12B视觉语言模型作为基础模型,该模型由400M参数的视觉编码器和12B参数的多模态解码器组成,兼顾了感知能力与推理能力。为了在保证模型性能的同时,降低部署成本、适配机器人边缘设备,他们采用了低秩适配(LoRA)技术,对模型的注意力投影和MLP模块进行针对性微调,而非全量微调——这种方式不仅减少了训练所需的计算资源,还能保留基础模型的多模态知识,实现快速适配。在训练过程中,研究者还实施了一系列优化策略:采用8位Paged AdamW优化器和Bfloat16精度,结合梯度 checkpointing 和梯度累积,在单块NVIDIA A40 GPU上实现了12B参数模型的稳定训练;通过递归空键删除和精简JSON格式,减少输入输出的token数量,避免内存溢出;以交叉熵损失为目标,同时监控困惑度(Perplexity),确保模型能够掌握行为树的JSON语法和逻辑结构。
落地验证
06
跨域真机测试
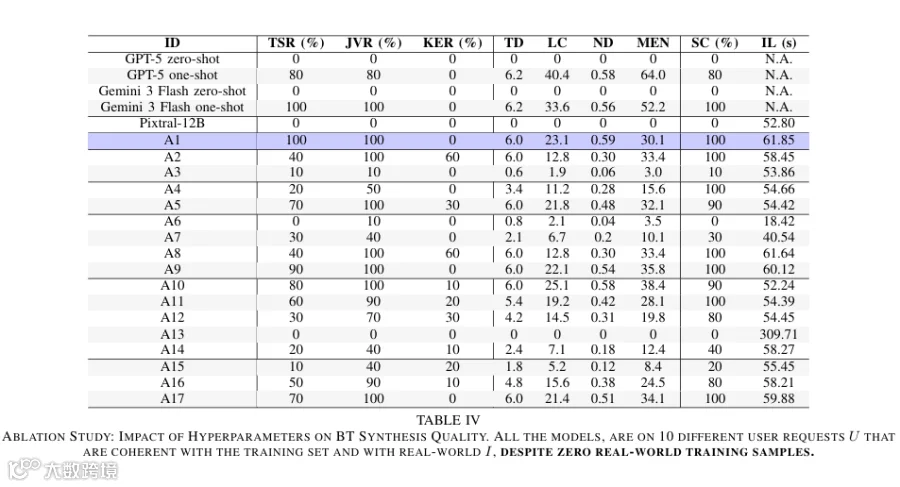
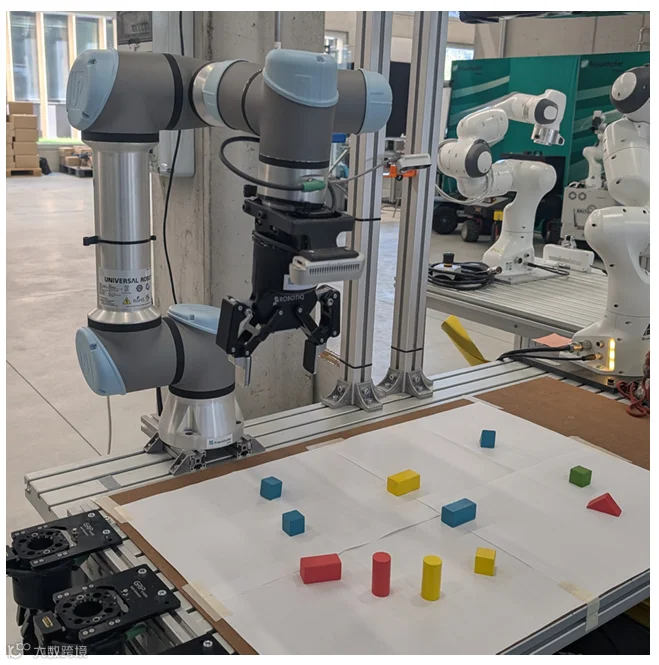
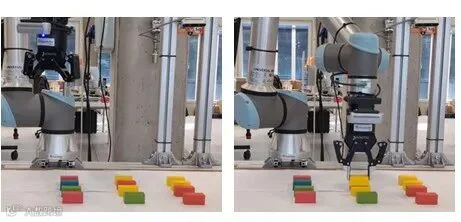
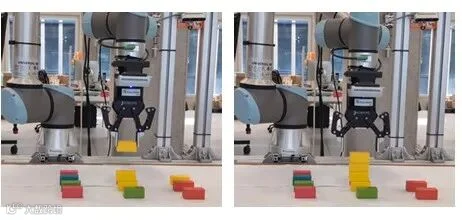
第三阶段是模型的验证与落地。研究者通过大量的消融实验,验证了不同超参数对模型性能的影响——实验结果表明,采用“heavy”模块映射(适配注意力和MLP模块)、LoRA秩为16、上下文窗口为4400 tokens、学习率为1e-4、数据集规模为10000样本的配置(模型A1),能够实现最佳性能,在JSON有效性、关键错误率、任务成功率等指标上均达到100%。更重要的是,该模型在零真实样本训练的情况下,成功实现了从仿真到现实的跨域迁移——在Franka Emika Panda(7自由度)和UR5e(6自由度)两款不同的工业机械臂上,针对拾取、放置、堆叠等任务,均达成了100%的任务成功率。这一结果令人震撼,它证明了合成数据的有效性——只要合成数据足够真实、多样,模型就能内化机器人任务的结构先验和空间逻辑,无需真实场景训练,就能适配真实机器人的操作。
核心亮点
07
安全可解释
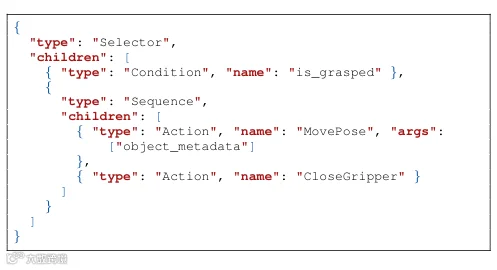
最引人关注的,是该论文对“可解释性与安全性”的极致追求,这也是其与其他端到端模型最本质的区别。论文没有简单让大模型生成动作序列,而是强制模型输出结构化的JSON格式行为树,并通过合成数据的设计,嵌入了三大约束条件,从根本上保证了决策的安全性和可校验性。其一,反应式守护约束:将交互动作(如关闭夹爪)嵌套在选择器或并行节点中,与条件判断(如是否到达目标位姿)并行执行,确保动作执行过程中能够实时响应环境变化,一旦条件不满足就立即停止,避免误操作;其二,空间偏移约束:模型被训练为自动计算目标物体的接近位姿,通过在物体基准位姿上添加正向z轴偏移,避免机械臂与物体发生碰撞,这一设计完美解决了传统机器人操作中碰撞风险高的问题;其三,扁平层级约束:禁止同一类型的复合节点嵌套,避免行为树逻辑过深,降低解析错误的概率,同时让决策逻辑更加清晰,便于人类理解和调试。
性能对比
08
优于闭源模型
此外,论文还通过与当前最先进的大模型(GPT-5、Gemini 3 Flash)的对比,凸显了自身方案的优势。在零样本场景下,GPT-5和Gemini 3 Flash均无法生成符合要求的行为树,要么输出自然语言描述,要么生成不符合语法的JSON;即使在单样本提示(One-Shot)的情况下,虽然能够生成结构化的行为树,但仍存在偶尔的语法错误和逻辑偏差。而论文提出的微调模型(A1),在零样本场景下就能实现100%的JSON有效性和任务成功率,无需占用上下文窗口放置示例,能够将更多资源用于空间推理和指令理解——这背后的核心原因,就是合成神经符号监督让模型真正内化了机器人任务的结构先验,而非单纯依赖上下文示例进行模仿。
总结回顾
09
范式实现转向
总而言之,该论文不仅是一次技术上的创新,更是机器人学习范式的一次重要转向——它打破了端到端黑箱模型与传统符号系统的对立,用神经符号方法实现了两者的优势融合;它跳出了“数据稀缺”的困境,用合成神经符号监督打通了机器人学习规模化发展的路径;它回归工程本质,将可解释性、安全性放在首位,为机器人在安全关键场景的落地提供了可行方案。机器人学习的终极目标,不是打造“最聪明”的模型,而是打造“最可靠、最可控、最易用”的机器人——只有让机器人的决策既聪明又透明,才能真正让机器人走进工业生产、医疗辅助、家庭服务等各个领域,成为人类的得力助手。
未来,随着研究的不断深入,研究者们有望解决当前方案的局限性,进一步丰富合成任务的多样性,完善物理交互逻辑的监督,实现符号规划与低层控制的更深层次耦合。而该论文提出的神经符号方法,必将成为机器人学习领域的重要方向,为机器人技术的可持续发展奠定坚实基础。
艾科伯特(AirkingRobots)专注于具身智能机器人领域,提供 UR 等系列机器人的模仿学习、强化学习完整解决方案,涵盖数据采集设备定制、政策训练优化、跨载体迁移适配等全链条服务。如需了解具体技术细节或方案咨询,可联系 AirkingRobots 获取专业支持。
更多案例请关注公众号:
商
务
联
系
邮箱:info@airkingrobots.com
电话:13161062216

—— E N D ——
点个喜欢吧