


介绍
TCP和用户特征
特征指的是固定的参考坐标系,机器人默认特征为基座。TCP是工具中心点,机器人默认工具中心点在法兰中心。
一般简单编程应用我们无需设置额外特征及TCP,但某些特定的编程我们需要进行设置以方便及优化我们的编程。
如何设置TCP
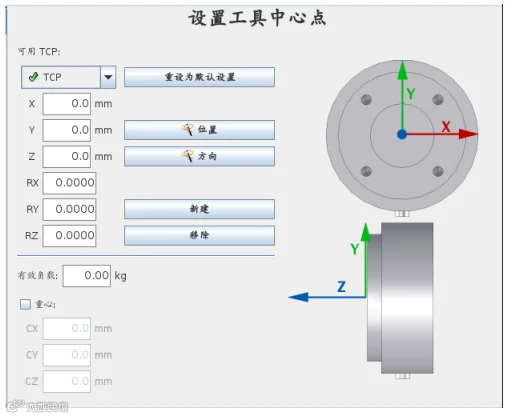
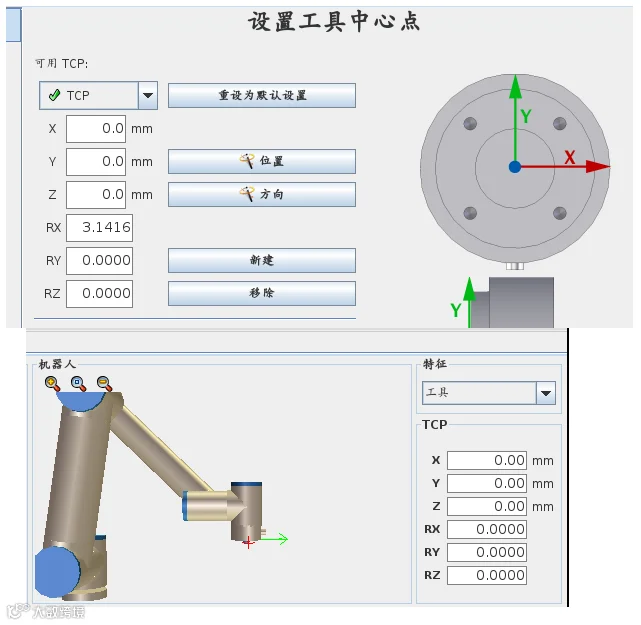
TCP指的是工具中心点,默认是工具法兰中心点。此时工具参数位姿变量全部为零我们可以通过给出tcp的六维参数来定义TCP,也可以通过向导法让机器人自动计算。其中位置向导用于计算XYZ、方向向导用于计算rxryrz。
如何设置用户特征
用户特征是用户自己定义的特征,如果不定义将会把基座作为特征。基座位置为机器人安装底座中心。
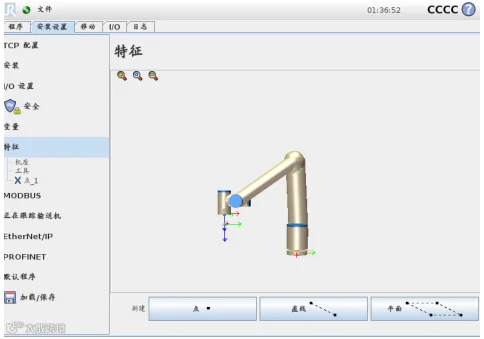
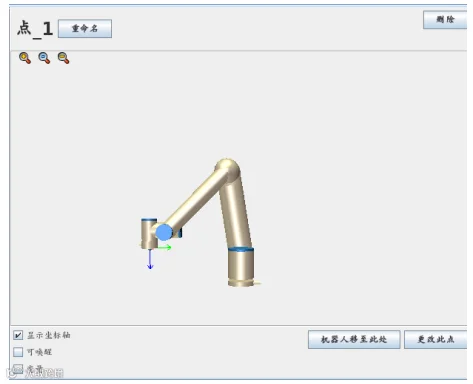
用户可以通过设置点、直线、平面的方法来设置用户特征。通过三种方法设置的结果是相同的、都是生成一个用户特征。用户特征的本质也是一个位姿变量,用这个变量来表示用户坐标相对于基座特征的偏移。
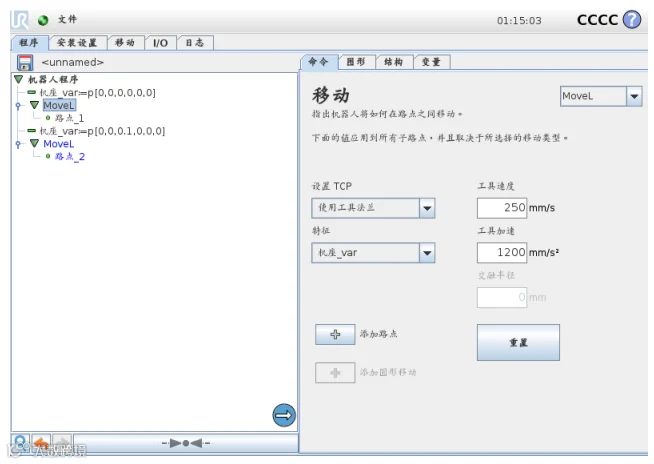
既然用户特征也是靠位姿变量来保存,为什么我们不能通过一个位姿变量来设置特征呢?实际上也是可以的,但是我们需要通过赋值给基座的方式来实现。
在赋值之前我们需要勾选“变量”,否者在赋值语句的左侧无法找到基座变量名称。下面是系统对变量勾选做出的解释。上面的可唤醒的含义是勾选后在移动选项卡里特征移动中可以选择在该特征下移动。

勾选完成就可以在程序中给基座赋值,并在运动中运用此变量了。下面举个例子来解释通过赋值的方式来定义特征。

TCP应用场景
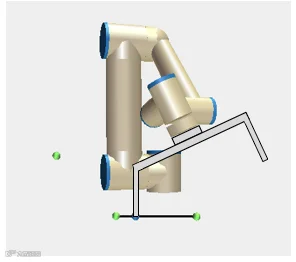
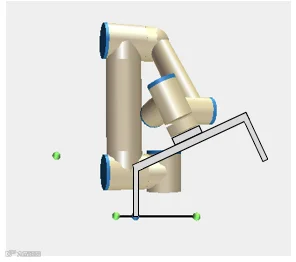
绕特定TCP移动或旋转
当我们需要示教一些位置。如先把一根针先绕着针尖调整姿态,再沿着针方向移动时。我们需要设置tcp以保证动作最简。把针尖点通过向导设置tcp,此时我们选择tcp旋转,此时机器人针尖位置固定。如果我们 不设置tcp那么机器人旋转的固定点是法兰中心,而对应的针尖就会移动,而无法满足我们需要的定点旋转调整要求。
机器人的运动是针对tcp(除movj外)的,所以我们的移动例如movel是针对tcp的直线,我们如果想让工具点在两点间直线运动,如果没有没有设置我们想要的tcp那么这个直线也仅仅保证法兰中心点直线运动,而我们设想的工具点很可能不是直线了。
视觉项目
视觉取放时如果产品特征点位置非机器人夹抓中心位置(夹抓不在法兰中心)并且产品本身位置含角度(某些圆形产品不含角度)。此类项目如果视觉发送的是机器人绝对坐标时,我们可以通过设置tcp来简化计算。

用户坐标应用场景
沿特定共建坐标系的移动或旋转
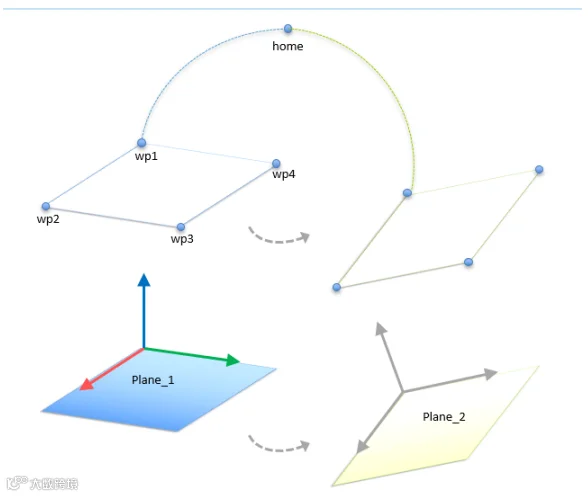
当我们需要示教产品的位置时,产品不在基座坐标系的某个面上,这样我们移动机器人会非常麻烦,此时我们设置特征可以简化示教过程。
视觉项目
很多在视觉项目通过设置用户特征来简化算法,例如在斜面的视觉抓取或者点胶等应用。在斜面视觉项目上,通过设置坐标系可以把斜面转换成xy平面方便视觉计算。在视觉涂胶项目上,产品上示教了多个位置,产品一直会动我们可以通过视觉计算出新的特征,通过改变特征,而不改变实际的点位完成轨迹的移动。
特征数据的使用
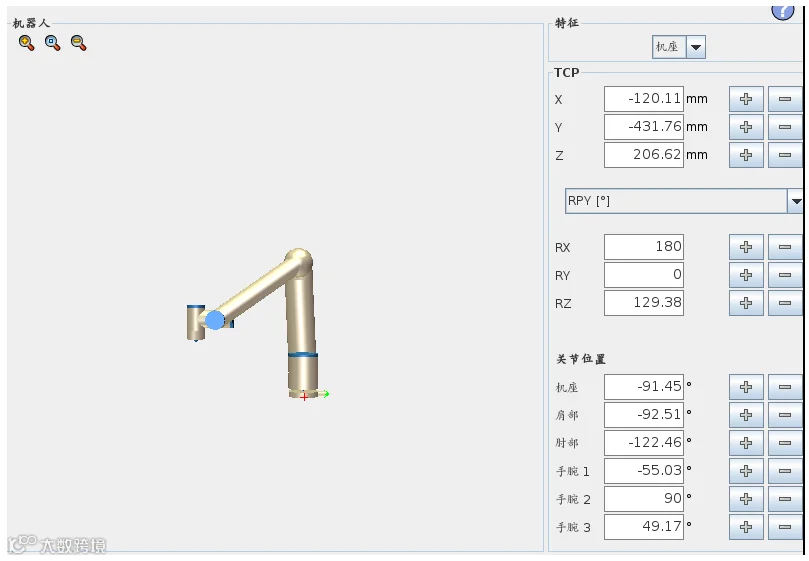
在位姿编辑器上可以直接编辑位姿变量,xyz输入大家比较清楚。对于旋转矢量一般难以直观感受,我们可以切换到rpy角来编辑。常用的是的把xy任意一个设置180度,另一个0度导致法兰朝下于平行xy面。优傲rpy的定义是绕tcp自身zyx依次旋转得到。当我们设置为rx=180 y=0 rz=129.38
时相对于把基座位置绕z旋转129.38度后,此时z轴还是向上,后绕x轴转180度后z轴即垂直向下了。
上面的操作相对于把工装调水平。
另外一个常见的需求是客户用点来示教一个平面希望z轴往相反的方向。没有直接的方法把z轴反向,但我们可以通过设置tcp来解决。我们通过点来示教特征就是把当前tcp坐标系固定成用户特征。
如果我们把tcp设置成z垂直法兰,那么设置的用户特征z轴就能反向。Z垂直反向的方法是旋转矢量
上rx或者ry设置pai(3.1415926…)rad由于无法输入pai。我们可以选择输入小数来去个最接近的值来达到目的。
艾科伯特(AirkingRobots)专注于具身智能机器人领域,提供 UR 等系列机器人的模仿学习、强化学习完整解决方案,涵盖数据采集设备定制、政策训练优化、跨载体迁移适配等全链条服务。如需了解具体技术细节或方案咨询,可联系 AirkingRobots 获取专业支持。
更多案例请关注公众号:
商
务
联
系
邮箱:info@airkingrobots.com
电话:13161062216

—— E N D ——
点个喜欢吧