
如果把无人船比作一位水上智能机器人,那感知系统就是它的眼睛、耳朵、皮肤和嗅觉,是无人船看懂环境、听懂信号、感知风浪、识别障碍、看懂水质的核心 “五官”。正是有了整套感知系统,无人船才能实现自主航行、自动避障、环境监测、安防巡逻、应急搜救,不用人工遥控也能独立完成水上任务。
下面用通俗易懂的方式,带大家完整看懂:无人船感知系统到底由哪几大部分组成、各自起什么作用、怎么协同工作。
一、视觉感知系统:无人船的 “眼睛”
视觉是无人船最直观的感知能力,负责看清水面、岸线、障碍物、人员和船只。
高清可见光摄像头
全天候实时画面拍摄,白天看清航道、漂浮物、岸边情况,用于巡逻取证、现场实时回传。
红外夜视摄像头
夜间、阴天、弱光环境下依然能清晰成像,实现24 小时不间断值守巡逻。
云台变焦摄像头
可上下左右旋转、远近变焦,远距离观测河面、湖面重点区域,放大看清细节。
AI 智能视觉识别
搭载智能算法,自动识别落水人员、违规垂钓、野泳、漂浮垃圾、过往船只,做到自动抓拍、自动预警。
二、雷达与激光感知系统:无人船的 “千里眼 + 触觉”
摄像头容易受大雾、暴雨、夜晚影响,而雷达和激光不受光线天气限制,是无人船的全天候感知保障。
 激光雷达
激光雷达
扫描周边三维环境,精准测出障碍物距离、轮廓、大小,构建实时环境地图,实现智能避障、自主规划航线。
毫米波雷达
不受雨、雾、沙尘影响,远距离探测船只、漂浮物,测速测距,提前预警碰撞风险。
超声波传感器
近距离盲区探测,适合狭窄河道、岸边近距避障,弥补雷达和视觉的近距离死角。
三、水声感知系统:无人船的 “水下眼睛与耳朵”
水面之上靠视觉雷达,水面之下就要靠水声设备,专门用来看透水下环境。
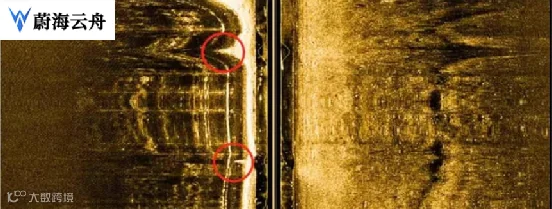
侧扫声呐
扫描河床、岸底地形,清晰识别水下暗管、沉船、礁石、水下障碍物,常用于暗管排查、河道普查。
多波束测深声呐
精准测量水深、生成水下三维地形图,用于水文测绘、水库库容测量、航道勘测。
水声通信麦克风
接收水下声波信号,实现船与船、船与水下设备的水声通信与探测感知。
四、环境水质感知系统:无人船的 “嗅觉”

相当于无人船的嗅觉和体感,专门感知水体质量与周边环境参数。搭载多参数水质传感器,可实时感知pH 值、溶解氧、浊度、电导率、氨氮、总磷、总氮等指标;同时可加装气温、湿度、风速风向传感器,同步监测水上气象环境,实现一边巡河、一边测水、一边测气象。
五、姿态与定位感知系统:无人船的 “平衡感 + 方位感”
负责让无人船时刻知道自己在哪里、姿态是否平稳、航向朝哪边。
GNSS 北斗 + GPS 双模定位
精准定位经纬度、航迹、航速,是自主巡航、航线复刻的基础。
IMU 惯性测量单元 / 陀螺仪
实时感知船体横摇、纵摇、倾斜角度、角速度,配合实现自扶正不倒翁功能、姿态稳定控制。
电子罗盘
实时校正航向,保证无人船按预定方向稳定航行,不跑偏、不偏航。
六、通信与数据感知系统:无人船的 “神经中枢”

所有传感器收集到的信息,都要靠通信系统传回后台、下发指令。包含 4G/5G 无线模块、数传电台、图传模块,把视频、位置、水质、姿态、报警数据实时传回岸基平台;同时接收远程控制指令、任务航线、调度命令,实现远距离智能化管控。
七、整套感知系统如何协同工作?
简单理解就是一个完整闭环:各类传感器实时采集环境数据 → 船载中控大脑汇总分析 → 智能算法判断障碍物、水质异常、姿态倾斜 → 自动规划航线、避障、调整动力、发出预警 → 数据同步上传云端后台
不靠人工操控,全靠 “五官 + 大脑” 自主感知、自主决策、自主作业。
八、为什么感知系统对无人船至关重要?
有了完善的感知系统,无人船才能真正做到:
自主巡航、不用人工遥控;
自动避障,防搁浅、防碰撞;
白天黑夜、雨雾天气都能正常作业;
看得见水面、探得清水下、测得出水质、稳得住姿态;
满足环保监测、河道巡检、暗管排查、应急救援、景区安防等全场景需求。
感知系统,就是智能无人船真正的 “智慧之本”,决定了一艘无人船是普通遥控船,还是具备独立作业能力的智能水上机器人。