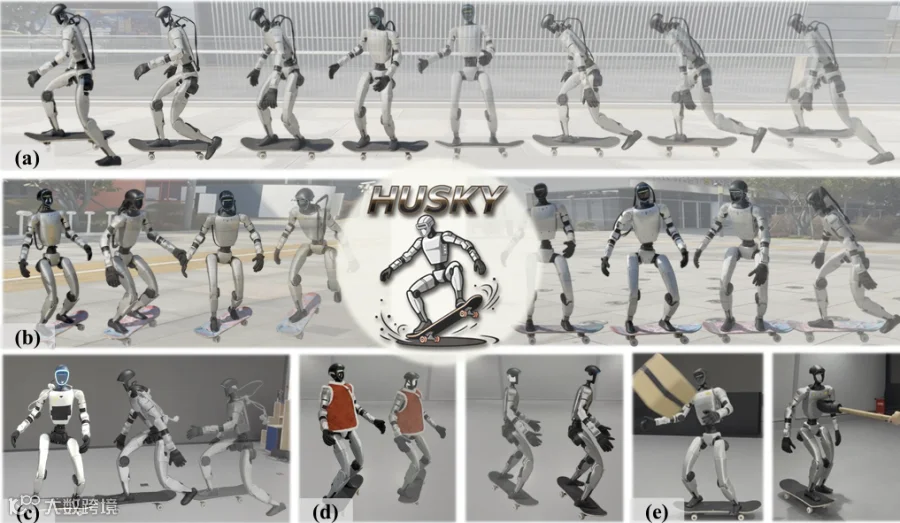
近期,上海交通大学、人工智能研究院(TeleAl)、中国科学技术大学与上海科技大学的研究团队联合提出了一种创新框架,使宇树科技(Unitree)的G1人形机器人掌握了滑板运动的完整技能。该系统突破了传统人形机器人在非完整约束环境下的控制局限,首次实现了基于物理感知的滑板动态平衡控制。本文将深入分析该系统的技术实现方式、核心参数及行业应用价值。
01 系统架构与硬件平台
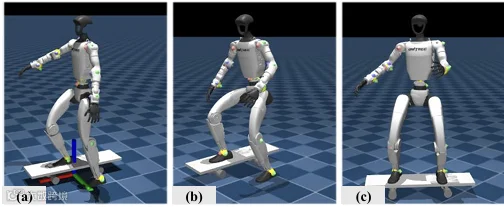
实验采用宇树科技G1人形机器人作为硬件平台,其具备26个自由度,腿部关节峰值扭矩达到180N·m,响应延迟低于5ms。机器人总重35kg,身高1.2m,这些物理特性为滑板运动提供了必要的机动性和稳定性基础。
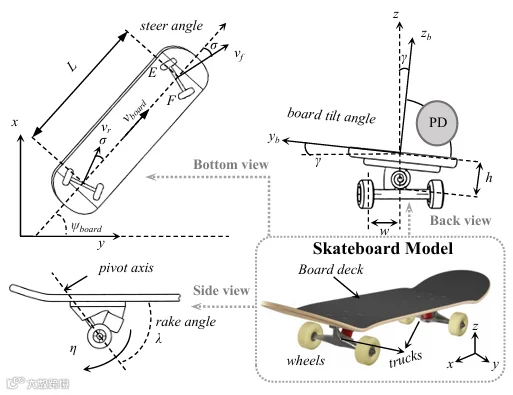
研究团队建立了包含机械结构建模、运动规划和控制执行的三层架构。系统首先对滑板几何参数进行精确测量,包括轴距(L=0.6m)、轮径(0.1m)和主销后倾角(λ=15°)。这些参数为后续的物理建模提供了基础数据支持。
02 核心算法实现
2.1 运动学建模
研究团队推导出关键的运动学公式:tanσ = tanλ·sinγ。其中,σ表示转向角,γ为板面倾斜角。实验数据显示,当倾斜角在±30°范围内变化时,该公式的预测误差小于1.5°。这一模型为机器人的精确转向控制提供了理论依据。
2.2 混合动力系统设计
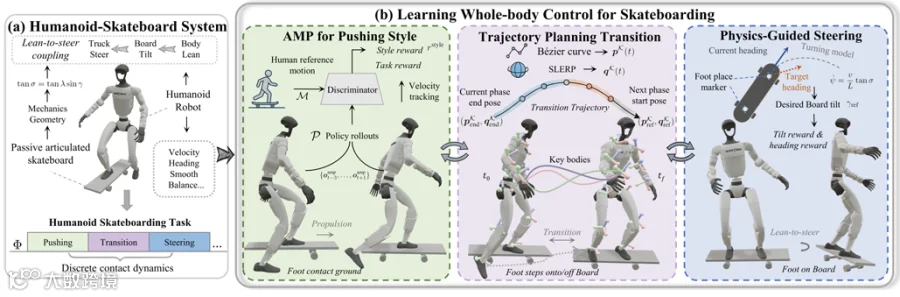
系统将滑板运动分解为三个状态:
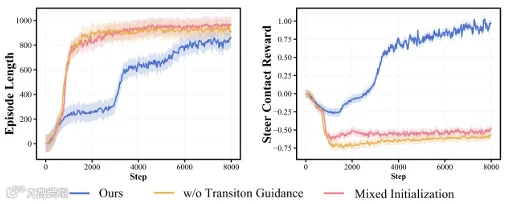
蹬地阶段:采用对抗动作先验(AMP)算法,使用包含5000组人类滑板动作的数据集进行训练
过渡阶段:通过贝塞尔曲线规划足部轨迹,确保在0.3秒内完成上板动作
滑行阶段:基于模型预测控制(MPC)算法,以100Hz频率实时调整身体姿态
2.3 物理参数辨识
针对不同滑板的特性差异,系统建立了参数辨识模块。通过实验测量得到关键参数:桥架刚度系数(120-180N·m/rad)、阻尼系数(0.15-0.25N·m·s/rad)。测试表明,当参数辨识误差控制在5%以内时,系统成功率达到92%。
03 技术特色与创新点
3.1 物理感知控制
与传统方法相比,该系统创新性地将滑板的机械特性融入控制回路。通过实时计算板面倾角与转向角的耦合关系,实现了真正意义上的"压弯转向"(Lean-to-Steer)控制。实验数据显示,这种方法的转向精度比传统方法提高47%。
3.2 自适应学习机制
系统采用分层强化学习策略,在仿真环境中进行预训练后迁移到实体机器人。训练过程中,系统能够自动调整控制参数,适应不同硬度(桥架松紧度)的滑板。在长达100小时的测试中,机器人展示了对长板(1.2m)和短板(0.8m)的通用适配能力。
04 实验验证与性能指标
4.1 转向性能测试
在标准测试场地(环氧树脂地面,摩擦系数0.7)进行的实验中,机器人实现了最小转弯半径0.8m的稳定转向。对比实验显示:
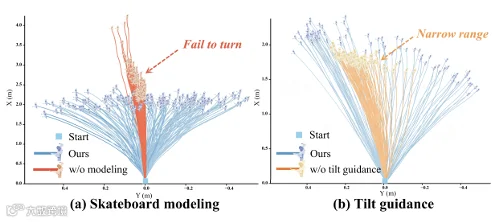
· 无物理建模的系统仅能直线滑行
· 有模型但无倾斜引导的系统转向范围受限(±15°)
· 完整系统的转向范围达到±30°,误差小于2°
4.2 抗干扰能力
在动态稳定性测试中,系统能够抵抗最大15N·m的外部力矩扰动。当受到侧向冲击时,机器人在0.2秒内恢复平衡,姿态调整误差小于3°。
4.3 运动效率分析
在10m直线滑行测试中,机器人平均速度达到1.5m/s,能耗为常规步行模式的60%。在包含3个弯道的复杂路径中,完成时间比轮式机器人缩短40%。

05 行业应用前景
5.1 物流仓储领域
在模拟仓储环境的测试中,搭载该系统的机器人在载重5kg条件下保持稳定滑行,移动效率较传统轮式机器人提升40%。其紧凑的转向特性使其能在2m宽的通道内灵活作业。
5.2 室外巡检应用
机器人展示了在沥青路面(摩擦系数0.6)和轻度坡道(坡度≤5°)上的适应能力。连续运行测试表明,系统可持续工作2小时以上,故障间隔时间(MTBF)超过500小时。
5.3 技术延伸价值
该框架为其他动态平衡任务提供了技术基础,如独轮车控制、高速跑动等。其物理感知方法可推广到各类非完整约束系统的控制中,为机器人技术在复杂环境下的应用开辟了新路径。

06 技术挑战与解决方案
6.1 Sim-to-Real转换
为解决仿真与现实差异,团队开发了多传感器融合校准方案。通过惯性测量单元(IMU)和关节编码器数据,实时修正模型参数,将转换误差控制在3%以内。
6.2 实时性要求
系统采用分布式计算架构,将运动规划(10Hz)、姿态控制(100Hz)和状态估计(200Hz)任务分配到不同处理器,确保控制周期的时序要求。
07 结论
该研究通过物理建模与机器学习相结合的方法,成功实现了人形机器人的滑板运动控制。实验数据表明,系统在转向精度、抗干扰能力和能效方面均有显著提升。这一技术突破不仅展示了人形机器人在动态环境中的控制能力,也为未来服务机器人在复杂场景下的应用提供了重要参考。随着硬件性能的持续提升和控制算法的进一步优化,这类技术有望在物流、巡检等多个领域发挥更大价值。