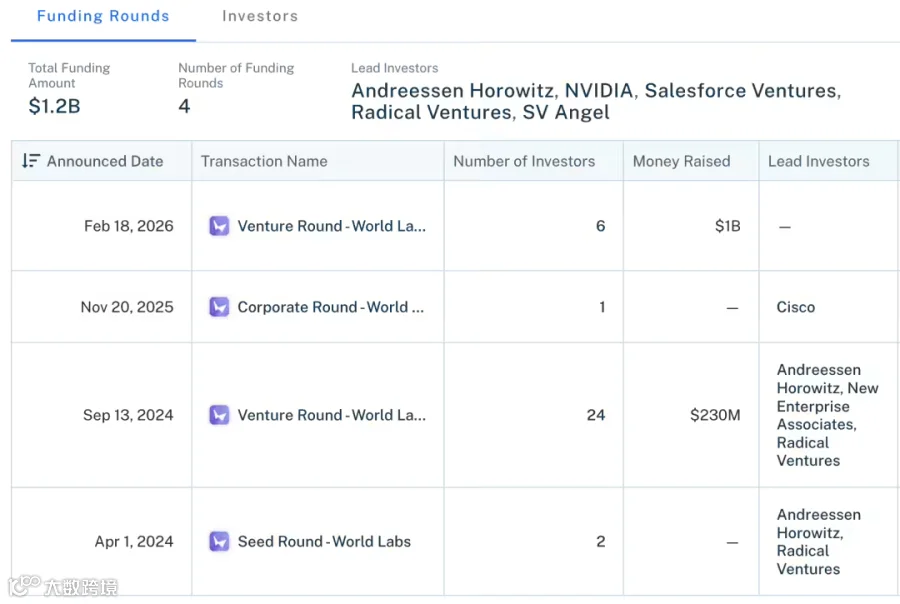
2026年2月,一笔震动AI行业的融资尘埃落定。李飞飞创办的WorldLabs宣布完成10亿美元(约合70亿元人民币)新一轮融资,估值跃升至50亿美元(约合350亿元人民币)。投资方名单囊括了英伟达、AMD、Autodesk、Emerson Collective、富达投资等科技与资本巨头。
此时,距离公司2024年4月成立尚不足两年,距离其2024年9月完成2.3亿美元B轮融资、估值突破10亿美元也仅过去数月。这种估值飙升的速度,即便在狂飙突进的AI领域也属罕见。
巨额资金涌入的背后,是一个更为根本的行业分野:AI与机器人产业正分裂为“工程优化”与“认知革命”两条截然不同的技术路线。WorldLabs所代表的,是后一条路径的终极愿景——为机器赋予一个能够理解并推理物理世界规律的“大脑”。
01 误解澄清:李飞飞反对的是什么?
市场存在一种普遍的误读,将李飞飞对人形机器人商业化前景的谨慎判断,简单理解为她对整个方向的“唱衰”。这是一种断章取义。
李飞飞的核心批判对象,并非机器人本身,而是“缺乏世界理解的机器人”。她长期强调,当前机器人的根本局限在于,它们不具备对物理世界的基本认知。这些机器人可以精确控制关节,模仿人类动作,执行预设任务,但它们不理解“为什么”——为什么力会这样传递?物体会那样运动?空间关系如何变化?它们本质上是高级的技能执行器,而非拥有常识的认知体。
正是基于这种认知,她对当前以硬件迭代和技能堆砌为主的人形机器人热潮持保留态度。她曾直言,人形机器人“基本没有商业化应用场景,落地或需20年甚至更久”。其论断的核心依据是数据瓶颈:自动驾驶技术能够持续迭代,依赖于数十年积累的、以亿公里计的真实道路数据;而人形机器人远未达到规模化部署阶段,无法获取同等级别、高质量的真实交互数据。没有数据,基于学习的AI模型就失去了进化燃料。
02 理论同盟:李飞飞与杨立昆的共识
如果将李飞飞的观点,与近期频繁批判大语言模型的杨立昆(Yann LeCun)放在一起审视,会发现两人站在同一条理论阵线上。他们都认为,以语言模型为代表的当前主流AI,并非智能的全部或基石。
杨立昆指出“LLM无法模拟物理世界,存在根本性局限”。李飞飞则提出“人类智能不仅是语言智能,更是空间智能”。两人的共同结论是:当下AI属于“符号智能”或“语言智能”,而下一阶段的突破必须走向“物理智能”或“世界模型智能”。

他们的研究侧重点有所不同。李飞飞领导的WorldLabs聚焦于“空间智能”(Spatial Intelligence),旨在让AI理解世界“是什么样子”。其核心产品“Marble”于2025年11月发布,是一个能够根据文本、图像或粗略3D布局,生成高保真、可交互、可探索的3D虚拟世界的多模态模型,目标是为游戏、影视、建筑及机器人仿真提供基础设施。
而杨立昆在2025年11月离开Meta后创立的AMI Labs,则更侧重于“预测式世界模型”,研究世界“将如何变化”。尽管切入点不同,但两人都锚定同一个目标:让AI学会理解世界运作的基本规律。
03 世界模型:机器人技术栈的“认知层”
在机器人的技术架构中,世界模型扮演着最高层——“认知层”的角色。其下的层级依次是:硬件身体(机械结构)、控制系统(运动算法)、技能学习(模仿与强化学习)、任务规划(动作序列)。
当前,绝大多数机器人公司的研发重心停留在第三层,即通过海量数据训练机器人掌握抓取、行走等具体技能。世界模型的目标,是构建一个更底层的认知基础设施,其核心功能包括:
空间建模:理解环境的三维结构与几何关系。
物理预测:预判物体在力作用下的运动轨迹。
因果推理:理解动作与结果之间的逻辑关联。
场景生成:创造逼真的虚拟环境用于训练和测试。
这类似于人类智能中,由小脑负责运动控制,由大脑皮层负责物理常识和推理。世界模型旨在成为机器人的“物理常识大脑”。
04 如果世界模型成功,机器人将如何质变?
若成熟的世界模型真正集成到机器人中,可能引发五个维度的根本性变革:
从训练驱动到推理驱动:机器人不再需要为每一个新任务收集海量标注数据进行训练,而是能够基于对物理规律的理解,进行零样本或少样本的推理与规划。
从场景依赖到场景泛化:机器人将不再局限于预训练过的结构化环境(如特定工厂车间),能够通过理解新环境的物理空间布局,自主适应并完成任务。
从反应式到预测式:机器人将从“碰撞发生后调整”的被动反应模式,升级为“提前预测结果并主动规避”的预测规划模式,大幅提升安全性与效率。
从动作模仿到因果理解:机器人将不仅模仿人类的动作序列,更能理解动作背后的因果逻辑(例如,知道用力推桌子可能导致桌上的杯子掉落),从而做出更合理的决策。
从技能机器到自主智能体:机器人将从执行预设任务的工具,进化为能够在复杂物理世界中自主设定目标、规划路径、执行任务的真正“具身智能体”。
这场变革的核心价值在于,有望打破当前机器人发展的最大瓶颈:数据稀缺与泛化能力差。世界模型能够生成无限逼真的仿真环境,让机器人在其中低成本、高效率地积累“世界经验”。李飞飞的学生、UT Austin教授Yuke Zhu提出的“数据金字塔”框架,就将仿真合成数据视为最具扩展潜力的数据形态。WorldLabs的Marble,正是为了成为这样一个规模化的机器人仿真训练场而构建。

05 路线分野:工程优化 vs. 认知革命
WorldLabs的巨额融资,让具身智能领域的两条技术路线变得前所未有的清晰:
路线A:工程机器人路线。以特斯拉的Optimus、Figure、宇树科技、智元机器人为代表。该路线优先追求硬件的快速迭代、成本下降与量产能力,通过收集更多真实数据、训练更多技能来驱动进步。其优势是能够快速推出产品,切入特定场景。局限性在于,系统的泛化能力严重依赖所见过的数据,缺乏对未见场景的推理和适应能力。目前,该路线正从技术验证走向早期商业化。
路线B:认知机器人路线。以WorldLabs、DeepMind的机器人团队以及杨立昆的AMI Labs为代表。该路线主张先让AI建立对物理世界的深刻理解(世界模型),再基于此进行推理和行动。其技术核心是空间理解、物理常识和因果推理。优势在于一旦突破,可能实现强大的场景泛化与自主决策能力。挑战在于技术难度极高,研发周期长,且离具体的产品落地和商业化更远。
历史经验表明,缺乏认知基础的技能系统,难以实现大规模、跨场景的可靠泛化。如果世界模型路线取得成功,人形机器人产业将迎来第二次进化:第一次进化是硬件躯体的成熟与成本可控,第二次进化将是认知能力的突破,让机器人真正理解它所处的世界。
06 结论:范式迁移,而非简单唱衰
李飞飞与杨立昆所推动的,是一场从“符号智能”到“物理智能”的底层范式迁移。资本押注WorldLabs,是在为“理解世界”这个更为艰难、但也更为基础的基础设施买单。
李飞飞没有“唱衰”机器人,恰恰相反,她指出了当前技术路径的局限性,并描绘了一条通往更通用、更智能的机器人的根本路径——这条路要求AI必须先学会理解我们所处的这个三维物理世界。这一步的代价极其高昂,过程也将无比漫长,但它可能是抵达真正“通用人工智能”的必经之路。