引言
国际空间站(ISS)宇航员每小时成本高达13万美元,其中大量时间耗费在拆包裹、搬货物这类重复性劳动上。
这不仅是巨大浪费,更成为太空经济规模化必须搬走的第一块成本绊脚石。传统的解决方案似乎陷入了两个极端:要么是造价高昂、定制化的专用机器人,要么是停留在概念阶段、追求完全自主的人形机器人。

一家名为Icarus Robotics的初创公司选择了第三条路,它放弃了对复杂人形和即时全自主的执着,转而采用一种更务实、更经济的混合模式:由地面操作员远程控制太空中的简易机器人。这种模式被其创始人称为“劳动套利”。近日,该公司宣布完成了由Soma Capital领投的610万美元融资。
01 核心问题:昂贵的宇航员与失效的传统方案
根据对现役宇航员及任务专家的访谈,一个清晰的图景浮现出来:宇航员在太空中花费大量时间执行基础体力劳动。例如,处理国际空间站每60天运抵的约3.5吨货物,仅拆包和整理就需要两名宇航员全职工作两周。
与此同时,传统太空机器人市场存在明显的断层。一端是NASA或波音等巨头主导的“定制机器人”,性能稳定但成本极高、研发周期长,无法普及。另一端则是众多初创公司描绘的“通用人形机器人”蓝图,它们往往造型炫酷,却难以解决实际痛点并快速商业化。
2030年国际空间站退役后,新兴的商业空间站(如Voyager Space的Starlab)将面临更严峻的劳动力缺口。它们需要高效、可负担且能快速部署的解决方案,但现有选项均难以满足。
02 差异化路径:简化硬件,渐进自动化,重构商业模式
Icarus Robotics的解决方案建立在三个关键重构上:
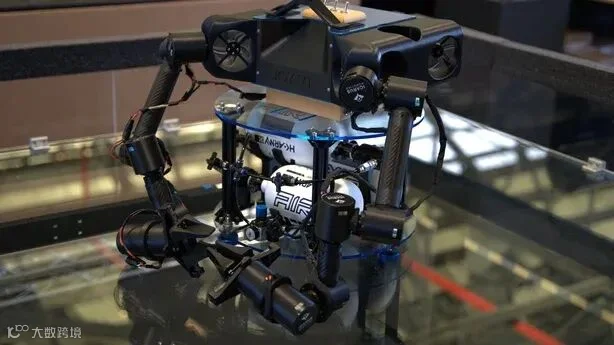
硬件简化:放弃仿人形态,采用“风扇推进平台+双爪夹爪”的简洁设计。该公司认为,国际空间站上80%的货物处理任务,通过这种设计即可完成。此举将硬件复杂度降低了60%以上,提高了在微重力环境下的可靠性。
渐进自动化:不追求一步到位的完全自主,而是采用“人在回路”策略。初期由地面操作员实时遥控机器人;通过积累操作数据,训练AI模型,使机器人能逐步理解“打开货物袋”等高级指令,并向半自主、全自主过渡。2026年2月的最新进展显示,其机器人自主解封ISS标准货物袋的准确率已达98.7%。
商业模式创新:核心是“太空劳动力即服务”。客户按任务时长或工作量付费,无需购买昂贵的机器人硬件。即便雇佣年薪13万美元的地面操作员全程遥控,其成本也远低于使用宇航员。该公司将这种成本差定义为“劳动套利”,声称能将相关任务的整体成本降低90%以上。
03 验证与进展:拿到订单,完成演示,组建团队
该公司的务实路径已获得初步市场验证,2024年底,他们与商业空间站开发商Voyager Space达成合作意向,计划在2027年于国际空间站上进行为期一年的演示任务。成功与否,将直接决定后续能否成为Starlab空间站的核心劳动力供应商。
2025年,团队完成了跨美国本土的远程遥操作演示,由纽约的操作员控制加州的机器人,流畅处理了真实的ISS货物袋。这证明了其技术路线的可行性。
团队建设也随之加速,近期引入的核心成员覆盖了从NASA飞行硬件工程师、特斯拉自动驾驶系统集成专家,到SpaceX任务控制专家和Voyager Space商务拓展人士等关键职能,为2027年的太空演示任务及后续商业化做好了准备。

04 未来愿景:从任务执行者到数据平台
Icarus的野心不止于制造机器人或提供服务。其规划揭示了一个更宏大的平台愿景:
第一阶段(2025-2027):聚焦遥操作服务,积累原始操作数据和现金流。
第二阶段(2027-2030):实现半自主操作,并开始将积累的、珍贵的微重力环境操作数据打包,作为数据产品授权给其他研究机构或企业,开辟第二收入来源。
第三阶段(2030年后):建成“太空劳动力平台”,平台上运行着大量可自主执行复杂任务的机器人,为各类客户提供按需服务,同时通过平台佣金、定制解决方案等获得持续收益。
结语
在太空经济爆发的门槛前,Icarus Robotics没有选择最炫技的道路,而是选择了最务实的一条。它清晰地识别出“成本”是当前的首要瓶颈,并用一种结合了现有技术(远程遥操作)与前沿方向(具身智能)的混合模式,给出了一个可快速验证的答案。其成败不仅关乎一家公司的命运,也可能为整个低地球轨道工业化进程,提供一个关于如何“有效启动”的关键样本。