
当我们对着智能音箱说一句 “打开灯光” 早已习以为常,可若想让机器人听懂 “煮杯咖啡”“整理桌面” 这类复杂指令,却曾是行业难以突破的瓶颈。
据悉,华为诺亚方舟实验室的最新研究,正打破这层壁垒:2026年3月16日,其发表在《Nature Machine Intelligence》的研究成果,将大语言模型与机器人操作系统深度融合,打造出开源具身智能框架ROS-LLM,让 “动动嘴指挥机器人干活” 从概念变成了真实可落地的现实。
这一突破,不仅为具身智能研究提供了可复现的解决方案,更让机器人从工厂的 “固定工具” 走向家庭、实验室等非结构化环境的脚步,又近了一大步。
01 机器人普及,为何卡在 “最后一公里”?
传统工业机器人的精准度毋庸置疑,汽车生产线上的焊接、电子厂的零件分拣,它能以微米级精度完成重复工作。但这份 “精准”,建立在专业工程师编写的固定程序之上,成了它走出工厂的最大枷锁。
家庭厨房的杯子可能被随手放在餐桌,实验室的试剂瓶位置随时会调整,现实世界的每一个场景都充满不确定性,而传统机器人只能执行预设指令,任务稍有变化就需要重新编程。
更关键的是,这种 “专家依赖模式” 成本极高,普通家庭和中小实验室根本无法承担,这也让机器人从工业场景走向民用市场,被卡在了难以逾越的 “最后一公里”。
而具身智能的出现,本是为了解决这一问题——让机器人通过物理实体与环境实时交互,实现感知、认知、决策和行动的一体化。但如何将人类的自然语言,准确转化为机器人的物理动作,让它真正 “听懂人话”,却成了具身智能发展的核心难题。
此前不少研究要么依赖商业大模型,难以复现;要么仅在仿真环境中验证,与真实场景脱节。
02 ROS-LLM的核心,到底藏着怎样的技术逻辑?
华为ROS-LLM框架能实现 “语言转动作” 的关键,在于其构建了大语言模型智能体(LLM Agent)与机器人操作系统(ROS)深度融合的通用技术架构,从底层逻辑上打通了语言理解与机械执行的链路,这也是其区别于传统机器人控制方案的核心所在。
从整体技术特性来看,ROS-LLM首先实现了自然语言到机器指令的自动转化,无需人工介入做代码适配,这是实现 “动动嘴指挥机器人” 的基础;其次,它支持内联代码和行为树两种可互换的执行模式,可根据任务的复杂程度、执行场景的需求灵活切换,兼顾了简单任务的执行效率和复杂任务的逻辑完整性;同时,框架具备原子技能的自扩展能力,能通过模仿学习不断丰富可执行的基础动作库;最后,它搭建了自动化优化与人机交互反馈的双循环改进体系,让机器人能在执行中持续迭代动作策略,越用越 “聪明”。
而具体的工作流程,更是形成了一套从理解到执行的完整闭环:当用户用自然语言发出指令后,首先由大语言模型完成意图解析与任务拆解,将 “煮咖啡”“做实验” 这类复杂需求,拆分为 “移动位置”“抓取物体”“按下按钮” 等一系列可执行的原子动作;随后框架会根据选定的执行模式,自动将这些原子动作转化为机器人操作系统可直接识别的ROS代码;最后由ROS系统驱动机器人的机械结构,按步骤完成物理动作,整个过程实现了 “语言输入 - 认知拆解 - 代码生成 - 机械执行” 的无缝衔接。
03 技术突破在哪?如何搭建语言与动作的桥梁?
如果说技术原理是ROS-LLM的骨架,那么三大核心技术突破就是让这个框架 “活起来” 的血肉,让它不再是简单的 “指令翻译器”,而是具备自主学习、动态调整能力的智能系统,真正搭建起了从人类语言到机器人动作的智能桥梁。
模仿学习让机器人轻松解锁新技能,非专业用户无需掌握编程知识,只需通过视觉观察、摇杆遥操作或手把手教学三种方式,就能教会机器人新的原子动作。华为研究团队就在厨房模拟环境中,通过这一方式让机器人快速学会了搅拌、倾倒、抛锅、擦桌子、调味和磨碎等烹饪动作,大幅降低了机器人的技能训练门槛。
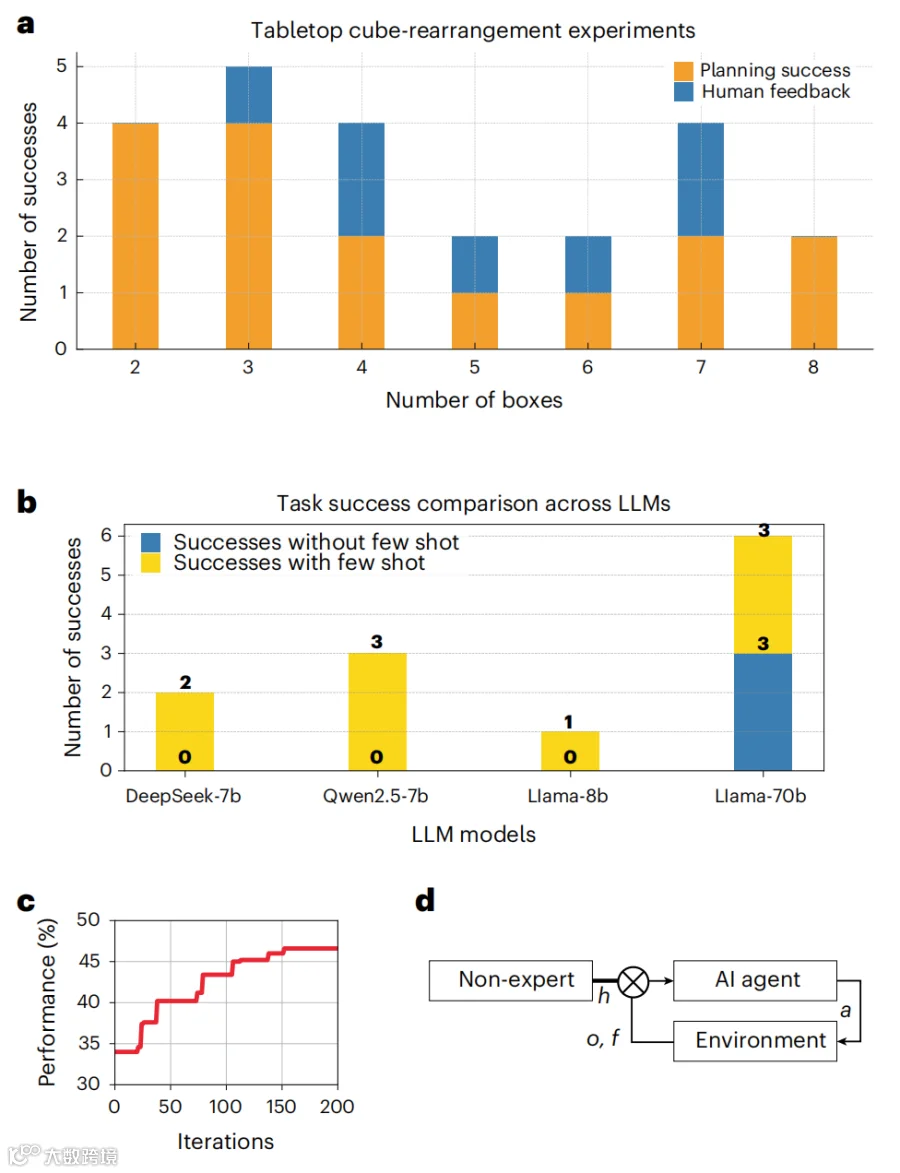
人类反馈实现实时策略修正,就像教小孩子做事一样,当机器人在执行任务过程中出现遗漏、错误时,用户只需用自然语言简单纠正,比如提醒它 “别忘了拿咖啡杯”“试纸要完全浸入溶液”,框架就能立刻捕捉修正指令,调整后续的动作策略。实验数据显示,在复杂的多步骤任务中,加入人类反馈后,机器人的任务成功率得到了显著提升。
环境自适应能力应对现实不确定性,这也是解决机器人民用化的关键。当目标物体的位置被移动、环境出现轻微变化时,ROS-LLM框架能驱动机器人重新感知环境、定位目标,继续完成任务;更智能的是,框架会将这次的应对经验进行存储学习,下次遇到类似的环境变化时,机器人能自主做出应对,无需人类再次干预,大幅减少了对人的依赖。
04 真实场景验证,它的实力到底有多硬?
一项技术的价值,终究要在真实场景中得到检验,而ROS-LLM的表现,交出了一份亮眼的答卷。研究团队在家庭、远程操控、实验室三大核心场景的测试,让我们看到了它的实际应用潜力,而所有测试均在真实机器人上完成,涵盖固定基座机械臂和带机械臂可行走机器人,也让其技术落地性更具说服力。
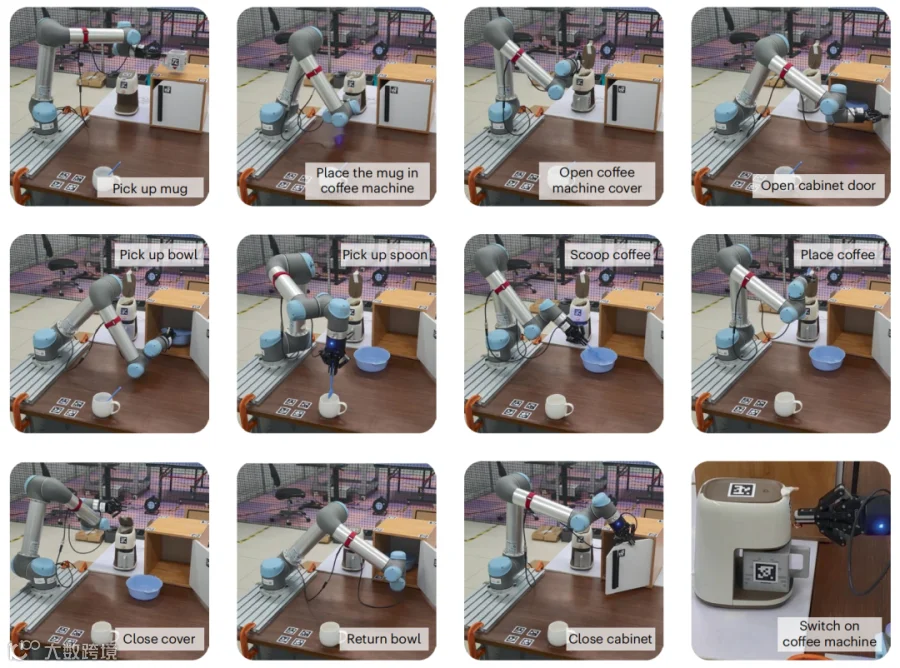
在家庭厨房场景,UR5机械臂依靠ROS-LLM框架,自主完成了包含12个步骤的煮咖啡任务,从寻找杯子、加水、放置咖啡粉到操作咖啡机、倒咖啡,全程无需人类介入,完美复现了人类煮咖啡的完整流程;在远程操控场景中,远在欧洲的操作员通过普通聊天界面发出自然语言指令,就能精准控制位于亚洲的机器人完成避障抓取任务,整体延迟仅2-3秒,这意味着未来跨地域远程作业、异地协作将成为可能;在化学实验室场景,机器人更是精准执行了 “测试碳酸氢钠pH值” 的实验,从配制溶液、取用pH试纸、检测溶液到观察颜色变化判断pH值,每一个精细步骤都严格按照自然语言指令完成,展现了其在专业场景的应用能力。
与其他研究相比,ROS-LLM 的独特优势还在于其开源属性。它全程使用 DeepSeek-7B Coder 等开源预训练模型,研究团队也已将完整代码开源,确保了技术的可复现性和可访问性。
对比现有具身智能方案,它更是实现了八大能力的全覆盖:同时支持开源模型、人类反馈、环境反馈、真实机器人实验、模仿学习、原子动作优化、远程控制和完整的 ROS 能力,成为目前该领域的全能型框架。
05 人人可用的机器人时代,真的要来了吗?
华为ROS-LLM的出现,最核心的意义在于大幅降低了机器人的使用和开发门槛。过去,操控机器人需要专业的编程知识,开发机器人的新功能更是需要工程师团队的长期打磨,而现在,普通人只要会说话,就能指挥机器人完成家务、实验、远程作业等各类任务,开发者也能在开源框架的基础上快速进行二次创新,这为机器人的普及扫清了关键障碍。
研究团队的目标,是让机器人像智能手机一样走进千家万户。这个愿景并非遥不可及,随着大语言模型的持续进化,机器人对自然语言的理解能力会越来越精准,能处理的指令也会越来越复杂;而机器人硬件的成本不断下降,机械臂、传感器等核心部件的普及,也让民用机器人的量产成为可能。
未来,我们对着家庭服务机器人说一句 “整理房间”“做顿晚饭”,让实验室机器人按口头指令完成繁琐的实验操作,让远程作业机器人在矿山、深海等危险场景中代替人类工作,或许会像今天用语音助手设置闹钟、播放音乐一样平常。
当然,具身智能的发展仍有长路要走,机器人在极端复杂环境中的泛化能力、多任务并行处理能力,还有待进一步提升,硬件与软件的协同优化也需要行业的持续探索。但华为ROS-LLM的开源,无疑为行业注入了一剂强心针,它让更多研究者、开发者能站在巨人的肩膀上继续创新,加速了技术的迭代与落地。
从工厂里只能执行固定指令的机械臂,到能听懂人话、适应复杂环境、自主学习成长的智能机器人,具身智能的发展,正在重新定义人类与机器人的协作方式。而ROS-LLM的出现,让我们清晰地看到,那个 “人人皆可操控机器人” 的智能未来,正一步步向我们走来。
免责声明:本文通过参考公众媒体内容,整理、翻译、编辑而成,仅供读者参考。文中的观点和内容不具有任何指导作用,对读者不构成任何项目建议或承诺!如果本文不慎侵犯您的权益,请与我们联系,我们将及时处理。