
点击关注

已关注公众号

当特斯拉Optimus还在地面迭代、瞄准火星作业时,一款来自瑞士的四臂太空机器人HELIOS突然亮相,直接打破人形机器人的传统范式。它没有双腿、四条机械臂兼具移动与操作,专为空间站微重力环境定制,一出场就改写太空机器人的竞争逻辑。
为什么太空机器人不能照搬地球人形设计?
地面人形机器人的核心是适配重力环境,靠双腿站立行走、双臂完成操作,无论是特斯拉Optimus还是国内多款双足机器人,研发逻辑都围绕地面场景展开。
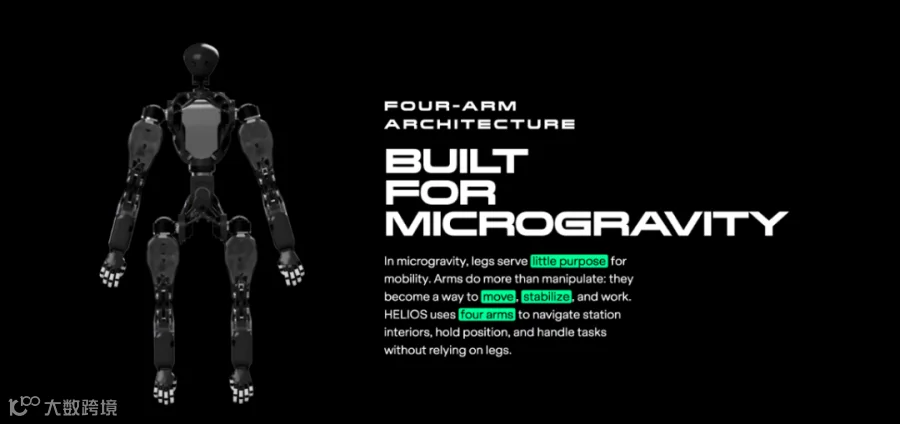
但到了太空微重力环境,双腿完全失去行走价值,反而成为空间与重量负担。空间站内部通道狭窄、结构复杂,机器人必须自主固定姿态、精准操作,传统双臂人形很难兼顾稳定与作业。
HELIOS直接放弃双腿,用四臂重构移动与操作逻辑:两条臂负责锚定舱体、稳住姿态,另外两条同步完成搬运、检修、工具操作,实现边稳定边作业,完美适配太空特殊工况。这种从场景倒推的设计,才是太空机器人的正确打开方式。

四臂 + 肌腱驱动,HELIOS的技术突破到底在哪?
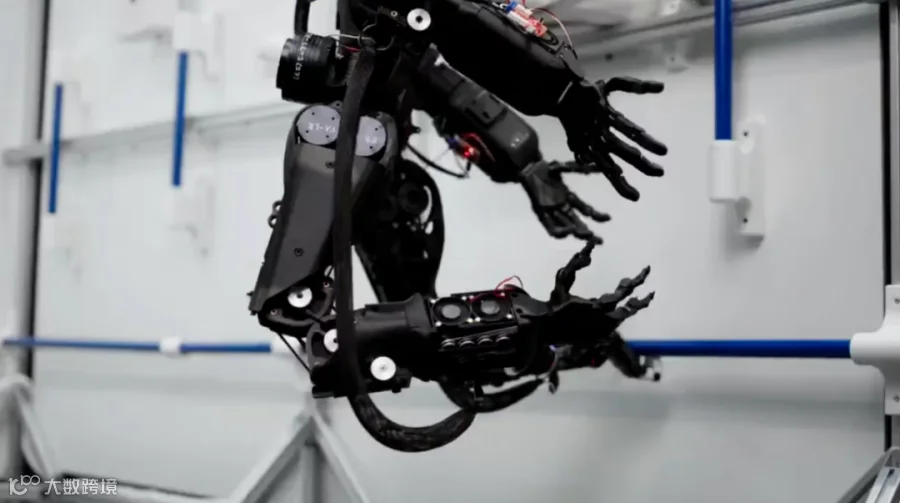
HELIOS的核心竞争力,藏在轻量化结构与高精度关节里。
它抛弃关节直连电机的笨重方案,采用肌腱驱动:电机集中布置在肩部,通过线缆与卷轴传导动力,大幅降低臂体重量,同时保留全角度活动能力,避免太空作业中因动作突兀导致姿态失控。肘部搭载滚动接触关节,运动更平稳、控制精度更高,在微重力下也能保持稳定,这是完成精细操作的关键。
四臂布局不只是形态创新,更是工程最优解。在失重环境下,任何晃动都可能影响作业甚至碰撞舱体,HELIOS用两臂固定、两臂操作,解决了传统机器人 “稳不住、干不快” 的痛点,多任务同步效率远超双臂方案。

解放宇航员,它到底能省下多少太空成本?
太空作业的人力成本极高,空间站大量基础工作占用航天员大量时间。货物卸载、物资分类、设备巡检等重复性工作,不仅消耗人力,还推高探索成本。
HELIOS的定位很清晰:不取代宇航员,只做高效辅助工具。它能承接所有流程化、机械性的舱内任务,让航天员专注于核心科研。从商业角度看,这款机器人直接降低空间站运营成本,提升在轨作业效率,是太空自动化的关键拼图。


太空机器人赛道爆发,产业格局将如何重构?
HELIOS的问世,标志人形机器人从地面竞争转向太空赛场,行业进入全新阶段。
全球科技企业纷纷布局:特斯拉推进Optimus太空化与抗辐射芯片研发,Foundation Robotics瞄准地外基地建设,Apptronik依托NASA技术积累布局空间站场景。国内也形成国家队、民营航天、科技企业跨界参与的格局,太空机器人成为人形机器人的终极战场。
长期来看,专用化、场景化将成为主流。地面机器人拼通用能力,太空机器人拼极端环境适配性。HELIOS证明,脱离场景的人形设计没有意义,针对微重力、高辐射、狭小空间的定制化方案,才是太空探索的刚需。
随着技术成熟,太空机器人将从舱内辅助走向舱外维修、月球基地搭建、火星前期基建,成为深空探索的核心装备。HELIOS只是开始,当人形机器人走出工厂、迈向深空,人类星际探索的基建时代,正式拉开帷幕。
往期推荐

融资10亿!上海国资重仓AMD前员工
吴夏青是谁?为什么离职英伟达创业?
点赞鼓励一下
图片来源:网络
本文不作为投资建议