

当人形机器人赛道还在为 “更贴近人类形态” 较劲时,波士顿动力的一次技术分享,为行业撕开了新的解题思路 —— 旗下Atlas机器人的底层设计,全程围绕 “工业场景能稳定干活” 展开,彻底摒弃了 “为仿生而仿生” 的设计冗余。
从硬件架构到感知能源,从维护设计到作业能力,Atlas的每一处技术细节,都在回答一个核心问题:面向工业化的人形机器人,该如何平衡实用性、可维护性与连续作业能力?而波士顿动力给出的答案,也为具身智能赛道的发展划定了以 “工程化实用” 为核心的新标尺。


01 Atlas的硬件架构,靠什么实现高通用与高一致性?
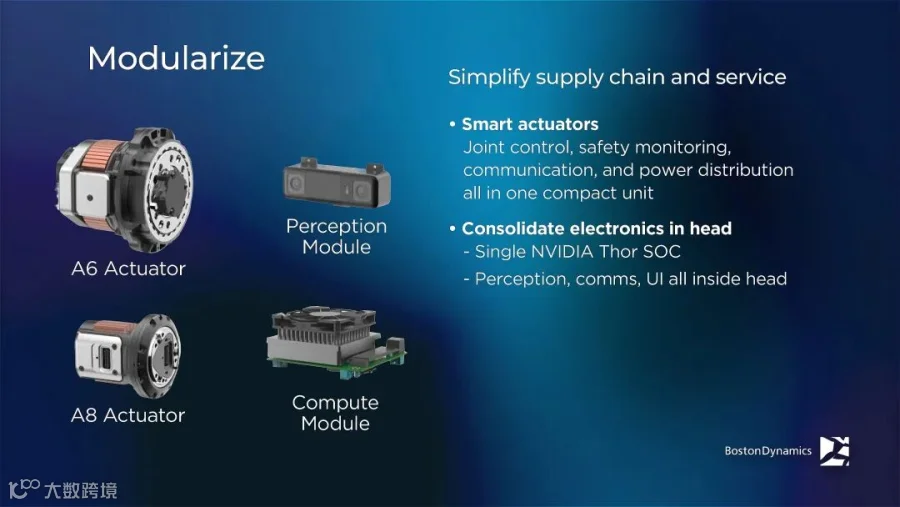
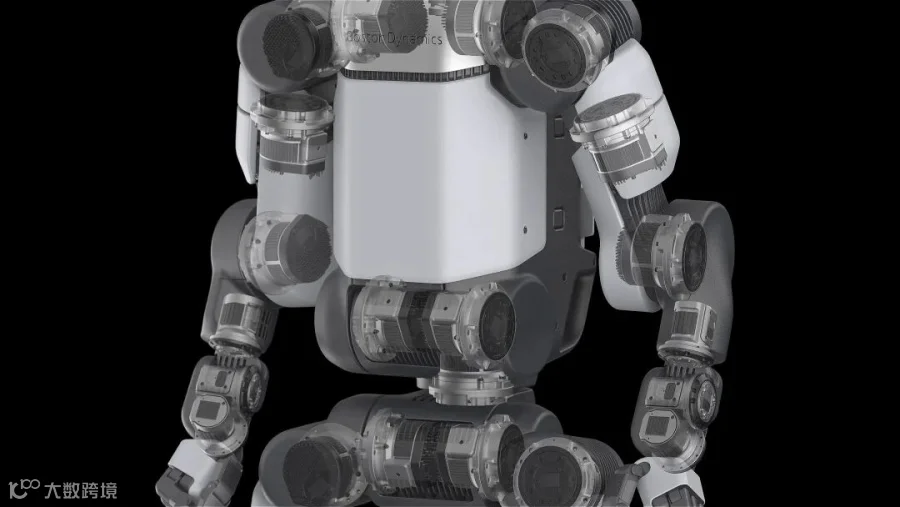
Atlas 能适配工业场景的规模化生产与维护,核心在于以标准化执行器为基础的模块化硬件架构,这也是其硬件设计的核心底层逻辑。整机以A6、A8 两类智能执行器为核心单元,将关节控制、安全监测、通信与供电分配等关键功能,全部集成到这两款紧凑的模组中,并非为每个关节单独定制部件,而是让同类高功率密度执行器在肩、肘、腰髋等不同关节位置实现复用。
在此基础上,波士顿动力还推动 Atlas 的左右侧、上下肢尽量共用相同结构件,让机器人形成 “执行器 + 连接结构件” 的简洁组合方式。同时,系统将硬件抽象为执行器模组、感知模组、计算模组三层结构,各层各司其职、协同配合。
这一系列设计带来的直接效果十分明确:大幅减少零部件种类,从源头提升制造一致性;实现备件高度通用,让供应链管理更简单;而这类执行器均优先采用被动散热设计,摒弃了复杂的主动散热系统,直接降低了整机的系统复杂度,从硬件层面减少故障概率,完美适配工业场景对设备高可靠性的基本要求。
02 FRU可更换单元设计,如何破解工业维护的痛点?
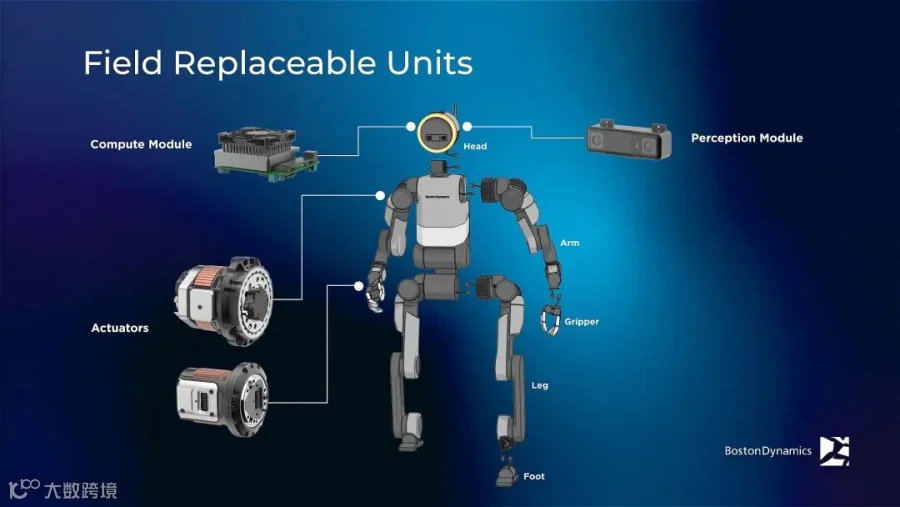
工业场景对设备的核心诉求之一,是故障后能快速恢复、减少停机时间,而 Atlas 的现场可更换单元(FRU)设计,正是针对这一痛点的精准解决方案,且这一设计的落地,完全建立在整机高度模块化与标准化的基础之上。
波士顿动力将 Atlas 整机明确划分为头部、感知模组、计算模组、手臂、夹爪、腿、脚及执行器等多个可独立更换单元,当机器人在作业中出现部件故障时,工作人员无需在现场进行复杂的拆修操作,只需直接替换故障模块即可完成维护。
结合 “同类执行器覆盖多个关节位置、部分肢体单元具备左右通用性” 的设计,Atlas 的备件种类被进一步精简,不仅直接简化了企业的库存、采购、维修和服务全流程,更关键的是大幅缩短了故障后的停机与恢复时间,让机器人的工业服务效率得到本质提升。
03 头部为何成为 Atlas 的感知、计算与交互核心?
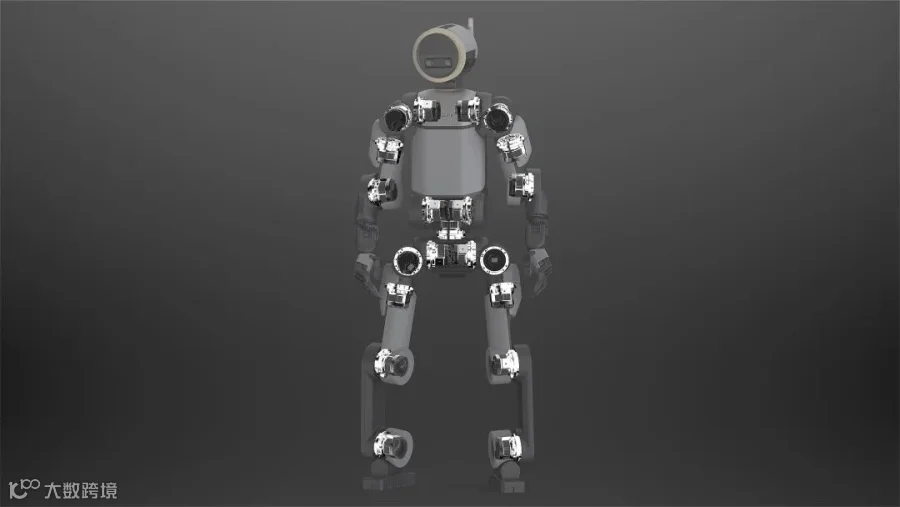
Atlas 彻底舍弃了拟人化的头部设计,转而将其打造成全机感知、计算与交互的集中平台,这一设计并非偶然,而是为了让核心电子系统更高效、更适配工业作业的实际需求。
在头部模组中,多组相机环绕布置在周向位置,实现了多方向的视觉覆盖,其感知范围不仅包含外部作业环境,还能精准覆盖机器人的手部、脚部及身体周边空间,为近身操作、避障和人员安全监测提供核心支撑;机器人唯一的风扇也集成在头部,配合其余关节的被动散热设计,在满足核心散热需求的同时,将系统复杂度降至最低。
此外,头部配备的外圈灯环承担状态提示与 UX 交互功能,让工作人员能直观判断机器人运行状态,既实现了人机交互的功能性,又避免了过度拟人化带来的成本浪费。而感知、通信和人机界面相关的电子系统,均由头部的单一高性能 SoC统一处理,实现了感知与计算的一体化,让数据处理更高效,也简化了核心电子系统的布局与后续维护。
04 能源与接口设计,怎样支撑工业7×24小时连续运行?
工业生产对设备的连续运行能力有极高要求,而 Atlas 在能源与接口的设计上,全程将这一需求放在首位,摒弃了隐藏式的仿生设计,采用外露式布局,每一处细节都指向 “维护便利、持续作业”。
Atlas 并未将电池隐藏在外壳内部,而是将其显式布置在机身外侧,这一设计的核心目的是支持机器人的自主换电能力;同时整机采用双电池架构,这一关键技术设计让机器人可在更换其中一块电池时,维持正常的运行状态,真正实现 “换电不断机”,满足工业场景 7×24 小时连续作业的核心要求。
在机器人的躯干前部,还集成了状态指示、各类接口与机身控制单元,工作人员无需拆解机身,即可完成日常的检测、操作与基础维护,让维护的便利性大幅提升。这种将电池、接口外露的设计,看似舍弃了仿生外观,实则是波士顿动力面向工业场景的工程化选择,将维护便利性、运行时长和服务效率放在了设计优先级的首位。
05 Atlas的外形与运动设计,如何适配工业实操需求?
不同于多数人形机器人围绕 “拟人化” 设计外形与动作,Atlas 的整体外形与运动范围,完全根据工业作业的实际需求定义,核心围绕夹爪可达空间、相机视场和安全间隙三大关键要素展开,让类人化的运动能力真正转化为工业实操能力。
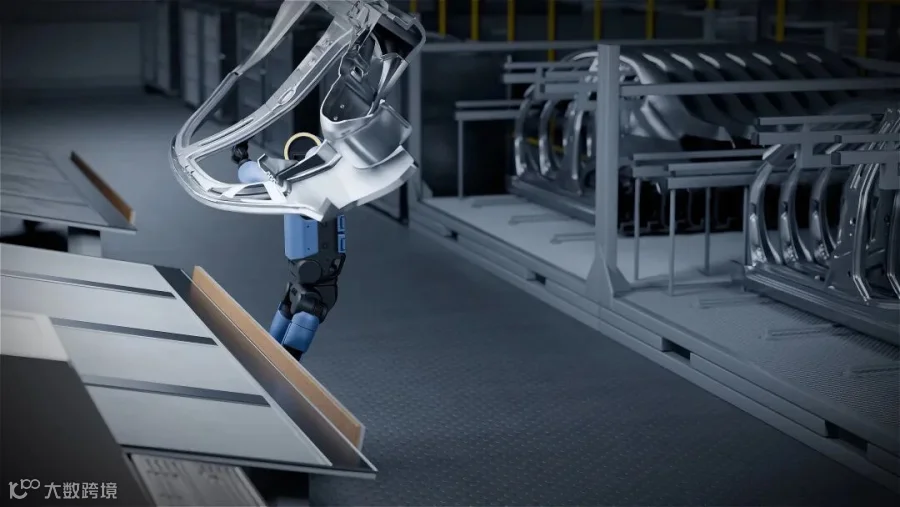
为了扩大作业范围,Atlas 的肩、肘与躯干采用特殊的避让设计,让机器人的上肢获得了更大的运动范围,有效扩大了夹爪的抓取和操作包络,这一设计让 Atlas 能顺利完成制造工位中大型车身覆盖件搬运等工业重体力作业。而头部相机的布置经过精准测算,尽可能减少了机身对视野的遮挡,让机器人在双臂作业过程中,能持续观测环境、夹爪及肢体位置,实现精准操作。

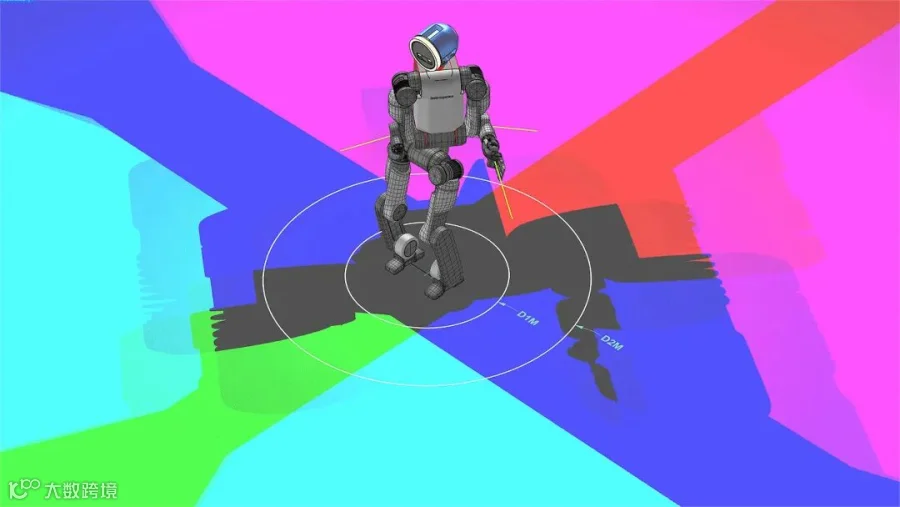
同时,Atlas 配备了明确的近场感知范围,通过地面同心圆及 D1M、D2M 标注界定近距离感知边界,配合多方向的视觉覆盖,让机器人不仅能完成精准的作业动作,更能实时避障并监测周边人员安全,完美适配人机协同的工业生产环境。
从曾经因跑酷、后空翻惊艳全球的 “技术炫技者”,到如今能在工厂工位踏踏实实干活的 “工业作业者”,Atlas 的转型,是波士顿动力对人形机器人工业落地的深度思考,也为整个人形机器人赛道提供了重要启示。

人形机器人的类人化运动能力,其核心价值从来不是模仿人类的外形与动作,而是利用这一能力解决工业场景中人工难以完成、效率低下或存在安全风险的任务。波士顿动力用 Atlas 证明,面向工业的人形机器人,本质是一套工程化的作业平台,而非 “高仿人类” 的展品;标准化的部件复用、模块化的架构设计、可快速更换的 FRU 单元、面向连续运行的双电池架构,这些围绕 “干活” 打造的技术细节,才是破解人形机器人规模化生产与工业场景落地的核心关键。
而整个人形机器人赛道的竞争,也正从 “仿生外观的比拼” 转向 “实际作业能力的较量”。对于行业而言,Atlas 的设计思路更像是一个明确的信号:只有抛开 “拟人化” 的执念,真正围绕工业场景的实际需求做设计,让机器人能稳定、高效、持续地创造价值,才能在人形机器人的工业化浪潮中站稳脚跟。
免责声明:本文通过参考公众媒体内容,整理、翻译、编辑而成,仅供读者参考。文中的观点和内容不具有任何指导作用,对读者不构成任何项目建议或承诺!如果本文不慎侵犯您的权益,请与我们联系,我们将及时处理。