
点击关注

已关注公众号


具身涌现6月25日讯,灵巧手企业 临界点 完成近10亿元新一轮融资,投后估值站上10亿美元关口。
本轮融资由未来资产、头部互联网大厂、京铭资本联合领投,东风资产、国信中数、上海电科基金等产业资本入局,清新资本、凯联资本等多家财务机构参与,高瓴创投、蓝驰创投、C资本等老股东持续追加投资。
从2026年1月成立到跻身独角兽,企业仅耗时5个月,四轮融资落地的速度刷新国内具身智能赛道纪录,也让行业重新审视灵巧手与人形机器人末端执行器的商业化价值。
不靠概念讲故事,临界点凭什么拿到资本持续押注?
纵观当下人形机器人赛道,多数企业仍依靠融资覆盖高额研发成本,商业化落地进度缓慢,而临界点走出了一条完全不同的发展路径。这家企业脱胎于智元体系,深耕灵巧手硬件、工程制造多年,2026年初独立运营后,迅速完成市场化交付。

截至本轮融资完成,旗下OmniHand系列灵巧手累计交付超8000台,配套夹爪出货量突破一万台,出货规模拿下2026年一季度国内灵巧手市场头部位置。更关键的是,企业成立首个完整季度便实现经营性净盈利,客户覆盖人形机器人厂商、工业自动化集成商、国内外科研机构,订单完全面向公开市场,并非仅依靠母公司内部消化。
资本愿意持续加注,核心看重两点:一是团队同时掌握硬件量产与触觉算法双重能力,补齐行业常见的“算法强、制造弱”短板;二是完整的产业资源协同,既有产业投资方打通下游落地场景,老牌创投持续加持提供长期研发资金,量产、数据、算法三条业务线同步获得资金支撑。
放弃大模型内卷,接触智能如何解决机器人实操痛点?
如今整个具身智能行业都在扎堆研发通用视觉大模型、世界模型,行业焦点集中在机器人环境认知能力,但真实落地场景里,大量设备能看懂任务,却无法精准完成精细操作。机器人抓取柔性物品时力度把控失衡,要么捏碎物料,要么抓握滑脱,核心症结就在于缺少高精度接触感知能力。
临界点在ICRA国际机器人大会上演示双灵巧手协作折叠气球小狗,直观展现接触智能的落地效果。整套演示依托自研DUET双层统一触觉智能架构实现,两层模型协同完成整套操作逻辑。上层运动规划层参考人类专业操作者动作建立初始策略,设备执行出现偏差时,系统记录人工修正数据,依靠强化学习持续优化动作流程;下层触觉接触层专注毫秒级力度、接触状态实时调控,在仿真环境完成海量抓握试错后,再将成熟策略部署至实体设备。
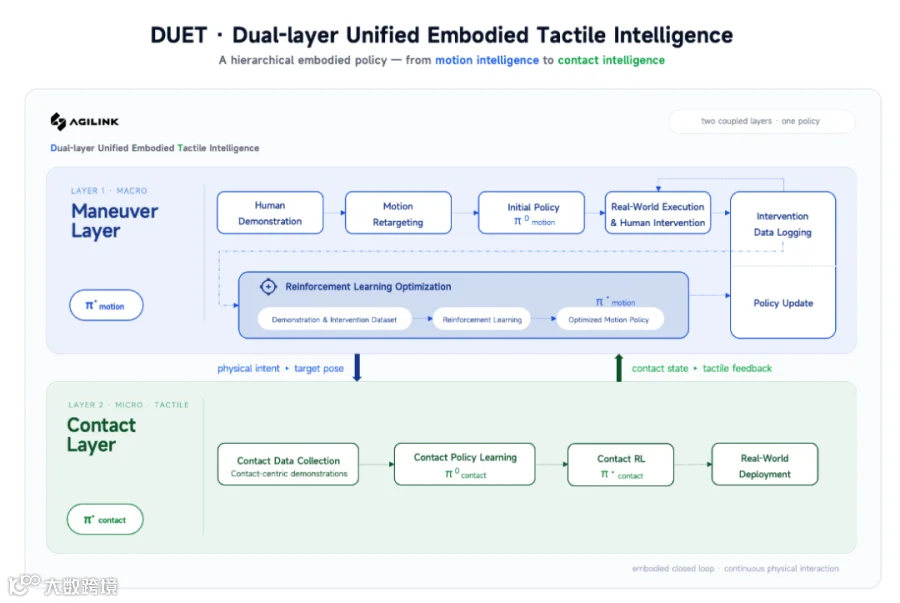
硬件端旗舰产品OmniHand 3 Ultra-M是整套技术落地的物理载体,手掌尺寸贴合成年人手部,整机重量仅630克,内置20个主动自由度。全直驱传动结构减少动力损耗,手掌分布300余个三维触觉感知点,单指尖搭载微型视触觉传感器,0.005N的力分辨率可以感知一张薄纸的重量,0.04mm空间分辨率精准定位接触点位,彻底解决传统机械手无触觉、只能粗略抓取的短板。
本轮融资资金将全部投入三大板块:持续扩大产线规模,优化产品出厂一致性,今年年底实现全流程自动化测试;搭建自有触觉数据采集工厂,消除数据转换偏差,计划2026年四季度对外开源部分数据集;持续迭代接触智能底层模型,拓宽机器人精细操作能力边界,形成“产品交付 - 数据积累 - 算法升级”的闭环增长模式。
灵巧手率先盈利,会重塑具身智能赛道竞争格局吗?
从行业角度来看,人形机器人商业化要依靠整机设备打开市场,末端灵巧手只是配套零部件,很难独立实现盈利。临界点成立数月便达成经营性盈利,给整个赛道带来全新的产业思考。
具身智能商业化落地存在先后顺序,触觉末端硬件会比通用大模型更早实现规模化变现。通用世界模型解决机器人认知问题,但工业分拣、精密装配、科研实验等真实场景,核心需求是稳定、高精度的物理交互,仅依靠视觉无法完成柔性物料操作,触觉硬件具备独立的市场需求与变现空间。

此外,“硬件自研量产 + 原生触觉数据 + 专用操作算法”是零部件企业可复制的发展路径。过去不少机器人企业只聚焦算法研发,硬件代工带来制造精度、数据采集偏差等问题;临界点自产灵巧手同步采集原生触觉数据,数据可直接用于模型训练,不存在数据重定向偏差,持续降低长期研发与迭代成本。
不得不提的是,赛道竞争逻辑将从参数比拼转向真实实操能力比拼。在此之前,厂商比拼自由度、外观等表层参数,随着触觉感知成为核心指标,资本与客户会更看重设备量产稳定性、触觉控制精度、真实场景落地效果,单纯依靠演示Demo吸引投资的模式将逐渐失效。
长远来看,临界点的快速发展,会推动国内人形机器人产业链分工更加清晰,末端执行器将成为独立高价值赛道,倒逼更多企业布局触觉感知技术,加速人形机器人从实验室Demo走向工业、商用规模化落地。
往期推荐

融资10亿!上海国资重仓AMD前员工
吴夏青是谁?为什么离职英伟达创业?
点赞鼓励一下
图片来源:网络
本文不作为投资建议