2026年1月27日,Figure发布了新一代人形机器人系统Helix02。该系统在4分钟连续任务中完成了61个动作的自主执行,包括行走、抓取、设备操控等系列操作,首次实现了房间尺度的移动操作(loco-manipulation)全流程闭环。与行业早期聚焦单点能力演示不同,Helix02通过端到端架构将移动与操作深度融合,标志着人形机器人从实验室演示向现实场景应用的关键突破。
突破传统架构的局限性
传统机器人采用分层控制模式,高层规划路径,底层执行固定动作。这种架构在静态环境中有效,但难以应对动态变化。例如当机器人搬运物体时,每一步移动都会改变重心,需要实时调整手臂姿态。此前多数系统通过“走-停-操作”的切换逻辑实现功能,导致动作割裂且容错率低。行业早期演示多为单次抓取或短距离移动,尚未解决长时序任务中的协同控制问题。
Helix02核心特点介绍与定位
Helix02的核心突破在于新引入的System 0层。该系统通过1000小时人类运动数据训练,以1kHz频率协调全身平衡与接触,替代了109,504行手动编写的C++代码。训练数据涵盖行走、搬运、支撑等多样化场景,使机器人能泛化到未见过的环境变化。例如在杂乱盒子中拾取金属件时,机器人通过触觉确认抓取目标,而非依赖预设的物体模型。
System 0的架构基于1000万参数神经网络,输入全身关节状态和基座运动,输出1kHz的关节级执行器指令。其在20万个并行仿真环境中训练,通过域随机化技术直接迁移到真机,实现了跨机队的标准化部署。
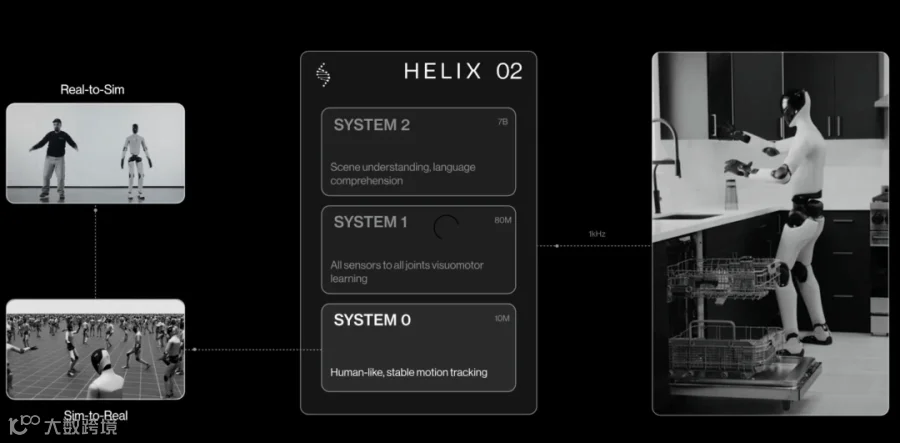
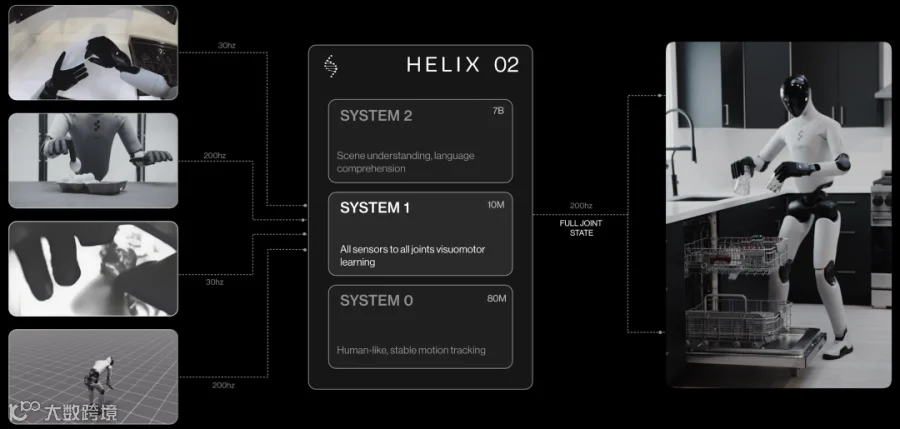
Helix02采用分层架构:System 2负责语义推理(如“打开洗碗机”),System 1以200Hz频率整合头部摄像头、掌心相机及触觉传感器数据,System 0以1kHz执行关节级控制。掌心相机与触觉传感器(灵敏度达3克)的引入解决了手部操作时的自遮挡问题。在药丸拾取任务中,头部摄像头被手部遮挡时,掌心相机提供了手内视角;触觉传感器则通过微力反馈确保精准抓取。
System 1首次实现“全传感器入,全关节出”的视觉运动策略,将头部摄像头、掌心相机、触觉传感器和全身本体感觉数据转化为全身关节控制指令。这种设计使机器人能够处理需要精细运动控制的复杂操作任务,例如拧瓶盖时需稳住瓶身并施加连续旋转力,推动注射器时需克服可变阻力并保持精确体积控制。
4分钟任务包含61个连续动作,如从洗碗机取出餐具、穿越房间、堆放物品并启动设备。此类任务要求系统具备隐式错误恢复能力:若物体意外移位,机器人需实时调整动作序列。演示中,机器人展示了双手协调操作(捡起物体并在手间传递)、全身工具化使用(用脚抬门、用臀部关抽屉)等类人行为。
任务执行基于动态优先级调整机制:当双手持物时,系统自动分配腿部资源维持平衡;当操作受限时,躯干和腿部辅助完成接触任务。这种全身协同能力使机器人动作流畅度接近人类水平,例如在搬运易碎物品时,每一步移动都同步调整抓握力度以保持稳定。
精细操作的再次升级
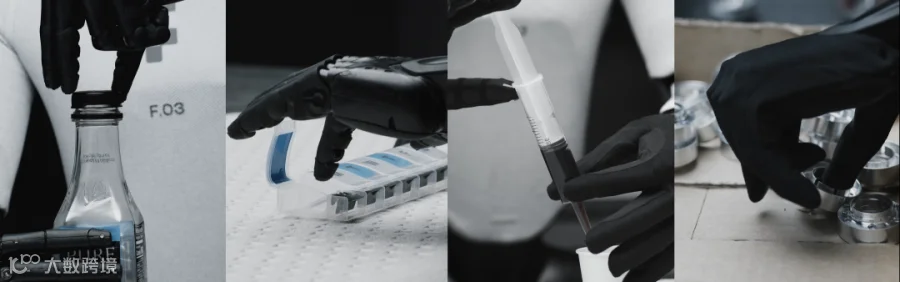
Helix02搭载的Figure 03机器人配备了掌心摄像头和高灵敏度指尖触觉传感器。触觉传感器可检测小至3克的力(相当于一枚回形针的重量),使机器人能够实现真正的多指灵巧操作。在四项灵巧任务中,机器人展示了超越纯视觉策略的能力:
· 拧瓶盖任务:双手协调施加扭矩,触觉反馈实时调节抓握力
· 药丸拾取任务:掌心相机定位遮挡目标,触觉引导精准抓取
· 注射器推动任务:力控驱动克服阻力,多指协调保持稳定
· 金属件分拣任务:触觉确认杂乱环境中的接触,视觉抓取选择稳健执行
这些任务验证了触觉与视觉融合对精细操作的必要性,为行业提供了硬件设计新范式。
对行业的实质性影响
Helix02的突破重新定义了人形机器人的技术标准。传统架构中,移动与操作分属独立系统,导致行为割裂;而Helix02的全身协同控制表明,人形机器人需作为完整智能体进行设计。随着波士顿动力Atlas展示动态平衡、特斯拉Optimus优化批量生产,行业竞争焦点已从“单点技术竞赛”转向“系统整合能力”。
Figure通过System 0的数据驱动控制、System 1的多模态感知融合、System 2的语义推理分层架构,提供了一条可复用的技术路径。该路径降低了系统复杂性,提升了动作自然性,为规模化应用奠定了基础。然而,长时序任务可靠性、复杂环境能耗效率等挑战仍需进一步解决。
Helix02的技术指标指向明确的工程化方向:1kHz控制频率确保动态稳定性,3克级触觉灵敏度达到人类指尖水平,掌心摄像头弥补头部视觉盲区。这些硬件基础结合仿真训练、数据驱动控制等方法,构建了具身智能的系统框架。
行业下一步需解决三大问题:首先,长时序任务的错误恢复机制需从隐式学习转向显式建模;其次,跨场景泛化能力需通过更大规模运动数据训练提升;最后,成本控制需通过硬件标准化和软件模块化实现。Helix02的实践表明,只有将机器人视为完整智能体而非模块拼装,才能真正释放具身智能的潜力。