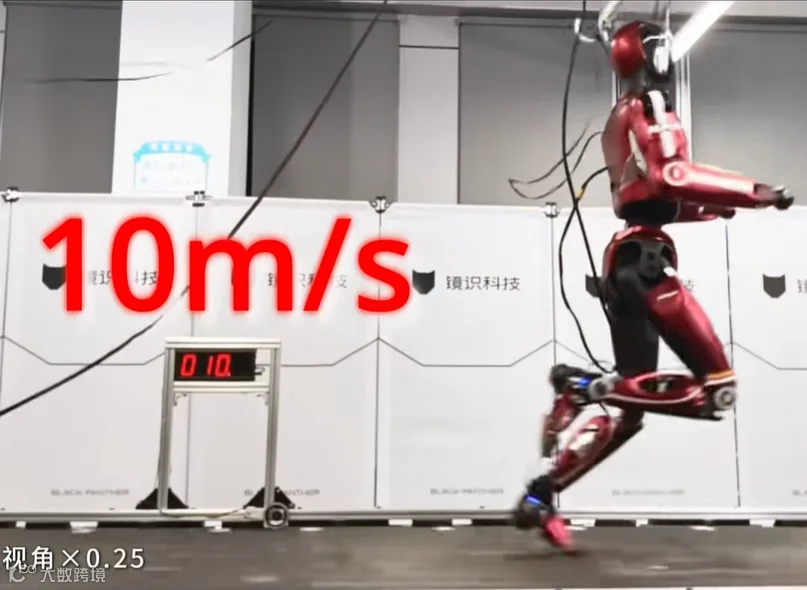
“10m/s全球最快机器人”,镜识科技正式发布的人形机器人Bolt以这一数字挑战了人们对机器人移动能力的传统认知。在测试场景中,红色机身的Bolt正全速奔跑,身后带有“镜识科技”字样的白色隔板成为速度的最佳见证。
画面左下角清晰标注的“无加速”提示,意味着这一速度并非短暂爆发,而是可稳定保持的运动表现。在机器人发展历史上,双足机器人的动态平衡与高速运动一直是最具挑战性的技术难题之一。
01 视觉突破
镜识科技Bolt机器人的亮相现场,红色机身与白色背景形成鲜明对比。机器人位于画面右侧,姿态舒展,步幅明显,显示出优秀的运动协调性。
在Bolt左侧,专门的速度显示装置实时反馈运动数据,这种设计让技术表现变得直观可视。画面中展示的8.0m/s速度已经接近人类百米世界纪录水平,而标题宣称的10m/s极速更是突破了以往所有人形机器人的速度极限。
对机器人工程而言,速度的提升并非简单的动力增加,而是一个系统性问题。它涉及动态平衡控制、步态规划、关节驱动、地面反作用力利用等多个方面的协同突破。
02 技术解析
镜识科技在Bolt机器人上实现的速度突破,背后是多个技术领域的协同创新。双足机器人的高速奔跑需要解决几个关键问题:平衡控制、步态生成、关节驱动和能量管理。
传统人形机器人在奔跑时往往面临稳定性难题,特别是在单腿支撑阶段,如何保持身体平衡同时产生向前的推进力是技术挑战。Bolt机器人能够达到10m/s的速度,表明镜识科技在实时控制系统和算法上可能取得了重要进展。

关节驱动技术方面,高速奔跑需要关节在极短时间内输出巨大扭矩,这对电机性能、减速器和热管理都提出了更高要求。从Bolt的外观设计来看,其关节部位可能采用了高功率密度的驱动方案。
“无加速”标注进一步证实了这一速度的可重复性和稳定性,表明Bolt能够在不同条件下保持这一高速运动能力,而非实验室条件下的偶然表现。
03 镜识愿景
镜识科技作为这次突破的幕后推手,其名称在画面中被反复强调。白色隔板上的“镜识科技”字样以不同字体和大小呈现,显示出这家公司对品牌形象的重视。
从命名来看,“镜识”可能蕴含着通过技术“镜映”人类能力、“识别”环境信息的双重含义。Bolt机器人的高速运动能力正是这一理念的体现——它不仅在模仿人类的奔跑动作,更在特定维度上超越了人类生理限制。

此次发布的Bolt机器人是镜识科技“新战略”的一部分,这一标识出现在画面顶部,暗示公司可能在机器人运动控制领域有更长远的技术布局和市场规划。
在竞争日益激烈的人形机器人赛道,镜识科技选择以“速度”作为突破点,这一差异化策略可能为其在应用场景拓展上赢得独特优势。
04 行业赛道
人形机器人赛道正迎来前所未有的发展机遇。从波士顿动力的Atlas到特斯拉的Optimus,各大科技公司纷纷加码这一领域。镜识科技Bolt机器人的出现,特别是在运动速度上的突破,为这一赛道增添了新的变数。
高速移动能力为人形机器人在实际场景中的应用打开了新可能。在紧急救援领域,快速移动的机器人能够更及时地到达事故现场;在物流配送中,高速机器人可以提高货物运输效率;在安防巡逻方面,快速响应能力也是关键指标。
Bolt机器人的技术突破还可能推动整个行业在运动控制算法、驱动系统设计、轻量化材料等方面的进步。当一家公司在一个关键指标上取得突破,往往会引起行业内其他参与者的追赶,从而加速整体技术发展。
从资本角度看,拥有明确技术优势的机器人公司更容易获得投资青睐。镜识科技此次发布的Bolt机器人不仅展示了技术实力,也为后续融资和市场拓展创造了有利条件。
随着测试画面中速度显示装置上的数字不断刷新,镜识科技Bolt机器人最终稳定在8.0m/s的实测速度。这一数字背后,是无数次算法迭代和硬件优化的积累。
在全球人形机器人竞赛中,速度曾长期是难以逾越的技术壁垒。如今,镜识科技用一抹醒目的红色,在这道壁垒上划开了一道裂口。当机器人能够以接近人类极限的速度奔跑时,那个曾经只存在于科幻作品中的未来,似乎又近了一步。