一家中国机器人公司,刚刚拿到一项关于如何让机器人腿部变得更紧凑的专利授权。这件事本身的技术细节,对于大众来说可能有些枯燥。但如果我们换个角度看,这背后指向的是一个清晰的产业趋势:机器人们正在努力“瘦身”,而谁能帮它们变得更轻巧、更紧凑,谁就可能抓住下一个市场机会。
这项专利来自宇树科技,在官方摘要里,它描述了一种机器人腿部结构,核心创新点在于对动力单元布局的优化。简单说,就是改变了电机在机器人腿里的摆放位置。
传统的足式机器人,比如我们熟悉的那种像狗或马一样的四足机器人,它的每条腿通常需要多个关节电机来驱动。大腿根部需要一个电机实现髋关节运动,大腿和小腿之间(膝关节)也需要一个电机。问题往往出在膝关节这个电机上。

为了驱动小腿摆动,这个电机必须被安置在靠近膝关节的地方,常见的设计有两种:要么直接把这个电机挂在大腿骨的外侧,要么把它塞进大腿内部,但与大腿根部的髋关节电机分开摆放。无论哪种方式,都不可避免地增加了机器人腿部的横向厚度。你可以想象,两条大腿如果都“鼓着包”或者内部被多个电机撑满,那么当四条腿收拢在身体下方时,整个机器人的躯干就不可能做得很窄。
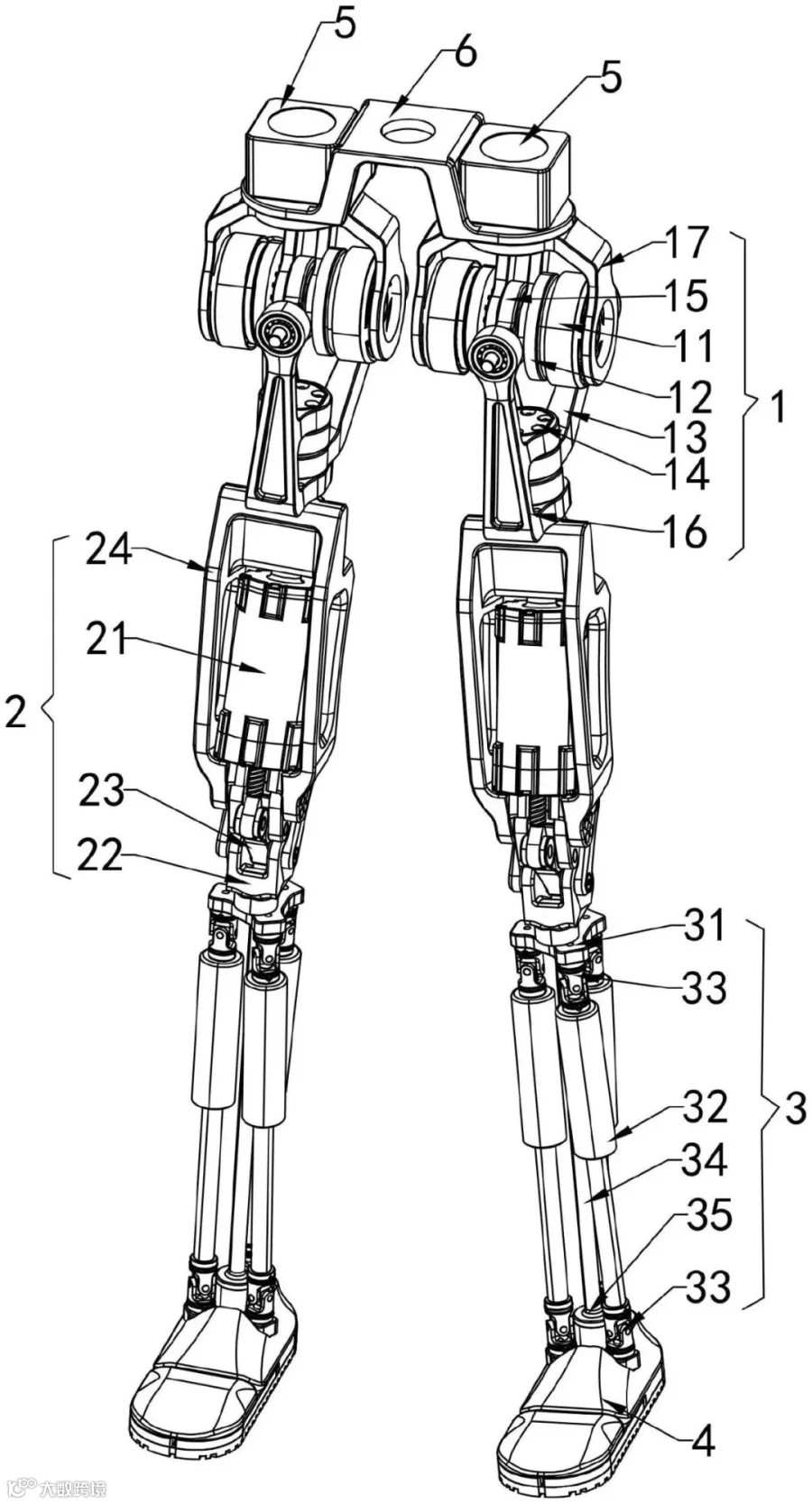
宇树这次专利的思路很直接:他们把驱动小腿摆动的那个电机,完全收纳进了大腿杆件内部一个专门设计的空腔里。相当于把膝关节的动力源,隐藏在了大腿的“骨骼”之中。
这样做最直观的效果就是,机器人腿部的横向尺寸被压缩了。当四条腿都采用这种设计时,机器人的整个机身宽度就有条件做得更窄。从外观上看,机器人变得更苗条、更紧凑。
请不要小看这个“变苗条”,对于足式机器人而言,尺寸和重量是影响其应用范围的关键枷锁。
当前,全球顶尖的足式机器人,如波士顿动力的Spot,其能力令人惊叹,但庞大的身躯和高昂的成本,依然将其主要限制在工业巡检、科研演示等特定场景。它无法轻易走进家庭、商店或更为拥挤的工业流水线旁。

缩小尺寸,意味着多个层面的突破。首先是成本,更紧凑的结构通常意味着更少的材料、更低的驱动负载,从而有可能降低电机和减速器的规格要求,这对整机成本控制是直接的利好。其次是机动性,一个更窄、更轻的机器人,在通过狭窄通道、拥挤空间,或者在复杂地形上保持平衡时,具有天然优势。最后是存储与运输。紧凑的体型直接降低了物流和部署的门槛。
因此,宇树这项专利的真正价值,不在于一个精巧的机械设计本身,而在于它呼应了足式机器人迈向大规模实用化进程中一个至关重要的技术方向:小型化、轻量化与低成本化。这并非孤例。全球的机器人研究者们都在为此努力,例如通过优化材料、设计一体化关节、改进控制算法来减轻重量和缩小体积。
01 技术路径上的务实选择
如果我们深入看这项专利的类型,可以看到它属于实用新型,细品别有一番风味。实用新型专利更注重产品的形状、构造改进及其带来的实用效果,审批周期相对较短。这透露出宇树科技在技术研发上的一种务实倾向:在核心运动控制算法之外,快速在关键机械结构上形成自主知识产权壁垒,解决眼下最实际的工程问题。
这种“结构优化”类创新,往往是产品走向成熟和商业化的必经之路。它不像全新算法突破那样引人瞩目,却直接关乎产品的可靠性、耐用性和最终成本。对于志在将机器人推向更广阔市场的公司来说,这方面的每一分改进都至关重要。
一旦足式机器人的体型和成本进入一个新量级,其应用场景的想象力将会被大幅打开。
设想一下,体型只有中型犬甚至更小的四足机器人,可以灵活地在家庭环境中穿梭,充当移动的安防摄像头、陪伴助手,甚至协助取物。在电商仓库里,它们可以替代部分轮式机器人,在货架间更自如地爬行、巡检。在抢险救灾现场,更紧凑的机身有助于它们深入废墟的狭小缝隙进行探测。
甚至,在工业制造领域,小型化的足式机器人可以作为移动的精密操作平台,携带机械臂在非结构化的工作站之间自主转移、执行任务。这些场景的实现,都依赖于机器人平台本身足够灵活、廉价且易于部署。
02 客观看待与未来挑战
当然,我们必须客观看待一项专利。授权专利代表的是一种法律认可的技术方案保护,并不意味着该技术已全面量产,或没有其他替代方案。机器人小型化是一项系统工程,紧凑的腿部设计只是其中一环,还需要轻量化材料、高能量密度电池、高效的散热管理等一系列技术的协同进步。
此外,过度追求紧凑化也可能带来新的挑战,例如内部元器件的散热问题、维修便利性下降,以及结构强度是否足够承受动态冲击。这些都是工程上需要平衡和解决的难题。
但无论如何,方向是清晰的。从实验室的炫技走向千家万户的实用,足式机器人必须经历一个“瘦身塑形”和“降低成本”的过程。宇树科技的这项专利,正是这个宏大进程中的一个具体技术脚注。
它提醒我们,机器人的进化,既发生在代码和算法的虚拟世界,也发生在每一个轴承、每一个电机布局的物理空间里。这场给机器人“瘦身”的比赛,已经悄然开始,而它的终点,将是机器人真正融入我们日常生活的那个未来。